- 진동을 통한 설비진단을 하기 위해서 기본적으로 알고 있어야 할 세가지
- 진폭
- 주파수
- 위상
위상
위상은 기준에 대한 비교각도를 의미한다. 절대위상측정을 하는 구체적인 방법은
-
우선 RPM 센서를 설치하고 원하는 센서를 읽어서 반복된 구간을 도시하여 비교지점을 체크한 후, 그 차이를 직접 각도로 환산하여 읽는다.
-
이 두 센서를 모두 읽고 위상을 표시해주는 계측기를 사용한다.
예
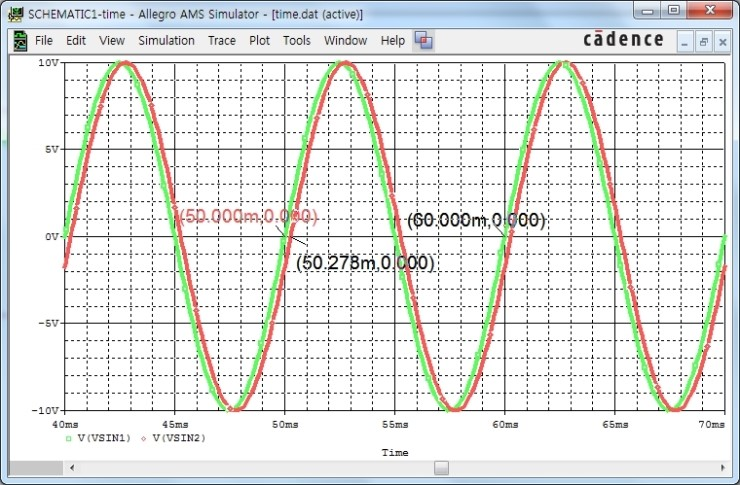
위 사진에서 VSIN1과 VISIN2의 위상차이는 0.278ms이다.
절대 위상
회전기계의 회전수는 원을 그대로 구현했다고 볼 수 있다. 회전하는 축에 달린 어떤 반사판 혹은 돌출된 도체, 기어 이빨의 반복 여부를 인식하여 회전당 펄스를 구하여 측정한다. 센서가 있는 기준 위치를 0도로 하고 그 기준위치와 비교하여 측정된 다른 피크의 위치를 위상이라고 한다.
상대 위상
반복하여 진동하는 두 물체 사이의 동일지점에서의 각도차이를 의미한다.
RMS(Root Mean Square)
어떤 데이터 혹은 집단의 특징이나 경향을 나타내는 데 대표값을 사용함. 보통 대표값을 나타낼 때, 평균값을 사용함. 진동 크기의 위상이 주기적으로 + 혹은 -로 바뀜. 진동 크기의 대표값을 나타내야 함. 평균값을 계산하면 0이 되어버리기 때문에, 제곱한 값을 평균한 값의 양의 제곱근을 사용한다.
t 분포
모집단 표준편차를 알 수 없을 때, 표본 평균과 모집단 평균 사이 표준화된 거리를 설명한다. 관측값은 정규 분포를 따르는 모집단에서 추출된다.
내 맘대로 정하는 RMS 가설
-
시계열 데이터의 의미가 없어진다.
-
진동 데이터가 아니라 비진동 데이터가 되어버린다.
-
진동과 다르게 비진동 데이터의 고장 경계 값은 정규화 되어있지 않고 수많은 인자가 서로 영향을 끼치기 때문에 훨씬 복잡한 기술의 고도화가 필요.
출처: https://post.naver.com/viewer/postView.naver?volumeNo=28645971&memberNo=17833679&navigationType=push
