RRT*알고리즘
정의
RRT* (Rapidly-exploring Random Trees Star) 알고리즘은 확률 기반의 경로 탐색 알고리즘 중 하나로, 주어진 공간 내에서 빠르게 경로를 탐색하고 확장하는데 사용됩니다.
기존의 RRT에서 부모(Parent) 노드의 재선정과 트리의 재구성(rewire)을 통해 성능을 향상 시킨 모델입니다.
먼저 RRT에서는 q_new와 가장 가까운 q_near를 부모 노드로 설정하였습니다.
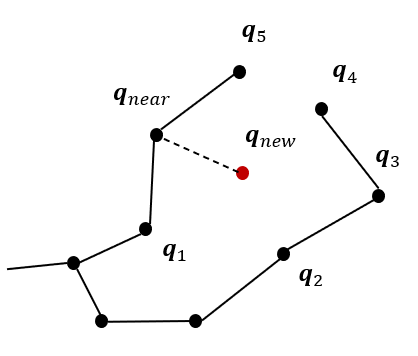
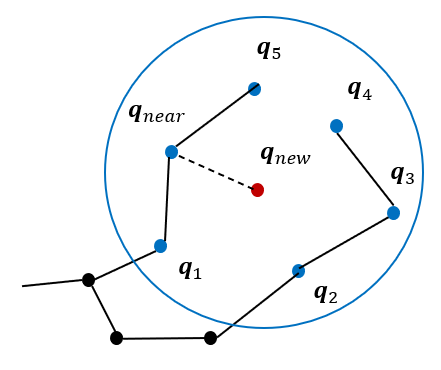
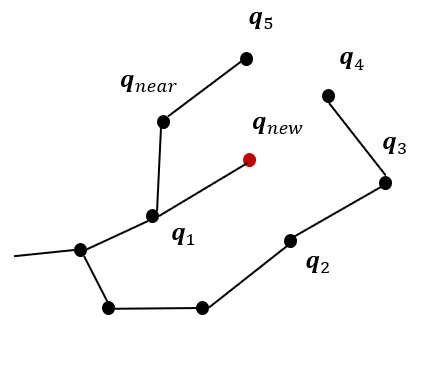
RRT* 에서는 q_new를 중심으로 일정 반경에 있는 모든 노드를 선택하여 비용(cost)을 계산한 후 가장 적은 비용을 가진 노드를 부모로 선정합니다.(아래 그림에서는 q1)
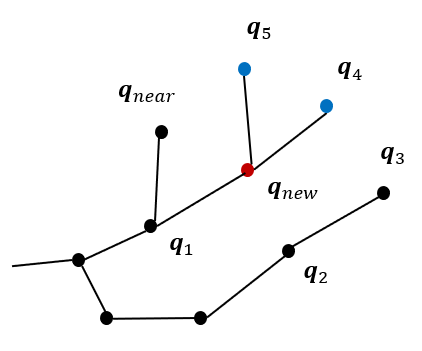
부모 노드를 결정한 이후에는 q_new의 반경에 있는 노드들의 비용과 q_new와 연결 되었을 때의 비용을 비교하여 만약 q_new에 연결하였을 때의 비용이 더 적다면 아래와 같이 트리를 재구성한다.
코드 구현
아래 코드는 시작점과 출발점을 변경할 수 있으며 랜덤한 장애물을 생성하고 Tree길이를 수정하여 RRT* 의 작동 방식을 확인 할 수 있다.
첨부한 코드는 실행 파일의 내용만을 포함하고 있다.
import numpy as np
from rrt_star import RRTStar
from search_space import SearchSpace
from obstacle_generation import generate_random_obstacles
from plotting import Plot
X_dimensions = np.array([(0, 100), (0, 100)]) # dimensions of Search Space
x_init = (0, 0) # starting location
x_goal = (100, 100) # goal location
Q = np.array([(8, 4)]) # length of tree edges
r = 1 # length of smallest edge to check for intersection with obstacles
max_samples = 1024 # max number of samples to take before timing out
rewire_count = 32 # optional, number of nearby branches to rewire
prc = 0.1 # probability of checking for a connection to goal
# create Search Space
X = SearchSpace(X_dimensions)
n = 10
Obstacles = generate_random_obstacles(X, x_init, x_goal, n)
# create rrt_search
rrt = RRTStar(X, Q, x_init, x_goal, max_samples, r, prc, rewire_count)
path = rrt.rrt_star()
# plot
plot = Plot("rrt_star_2d_with_random_obstacles")
plot.plot_tree(X, rrt.trees)
if path is not None:
plot.plot_path(X, path)
plot.plot_obstacles(X, Obstacles)
plot.plot_start(X, x_init)
plot.plot_goal(X, x_goal)
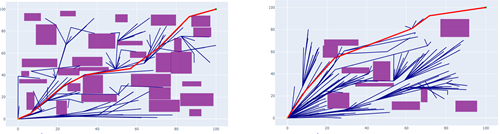
plot.draw(auto_open=True)실행 결과
출처
https://github.com/motion-planning/rrt-algorithms/tree/master
https://pasus.tistory.com/77

공부하고 있어요!
안녕하세요. 현재 자율주행 로봇의 SLAM 알고리즘을 개발하는 업무를 하고 있는 개발자입니다.
motion planning에 관련된 내용을 공유해주셔서 감사합니다~!
블로그의 다른 글들을 살펴보니 로봇 개발에 관심이 많으신 것 같아 로봇교육에 대한 간단한 대화(30~40분)를 나누고 싶어 이메일을 남깁니다.
irobou0915@gmail.com
LinkedIn Profile:
https://www.linkedin.com/in/samwoo-seong-037438170/
오늘도 좋은 하루 보내세요!