OpenCV DNN 모듈
-
Net 클래스

-
네트워크 불러오기
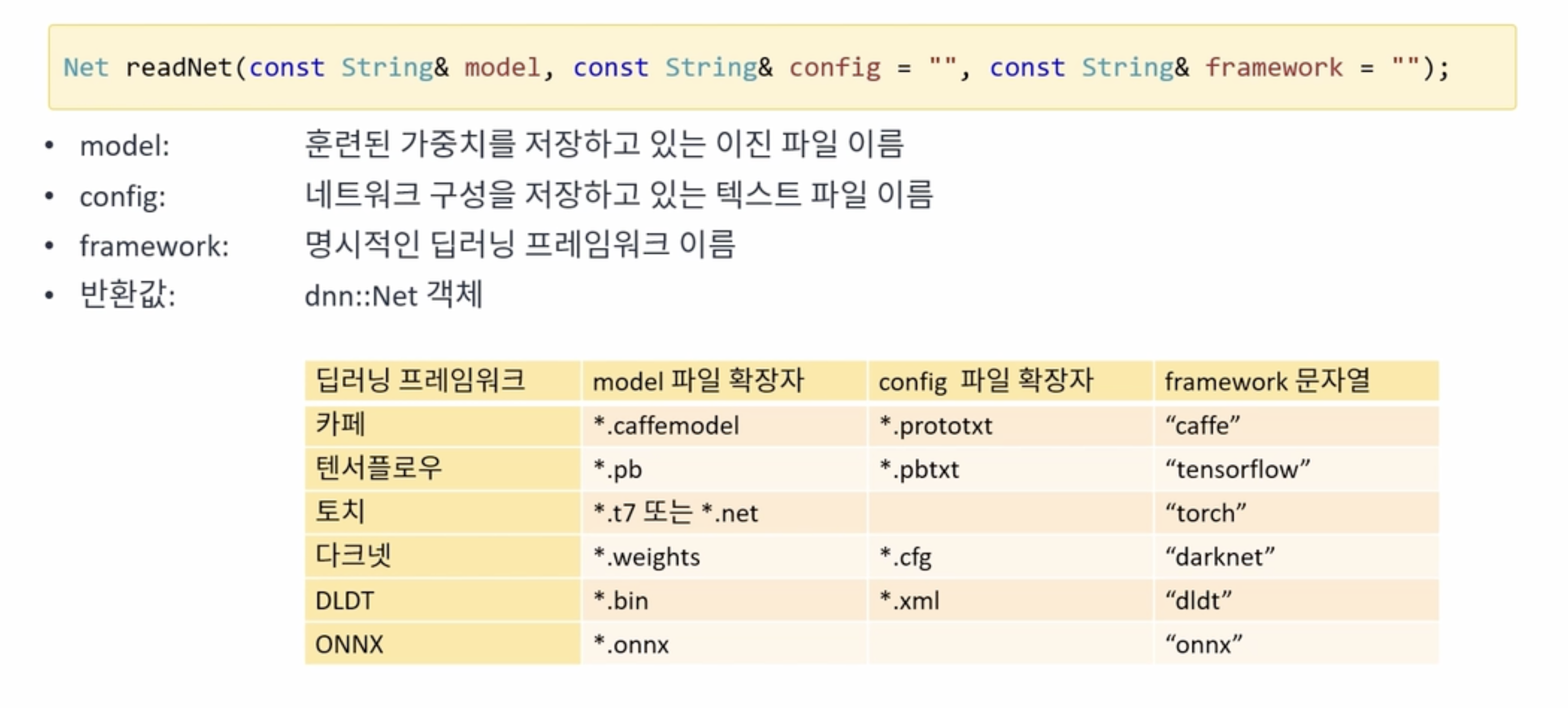
-
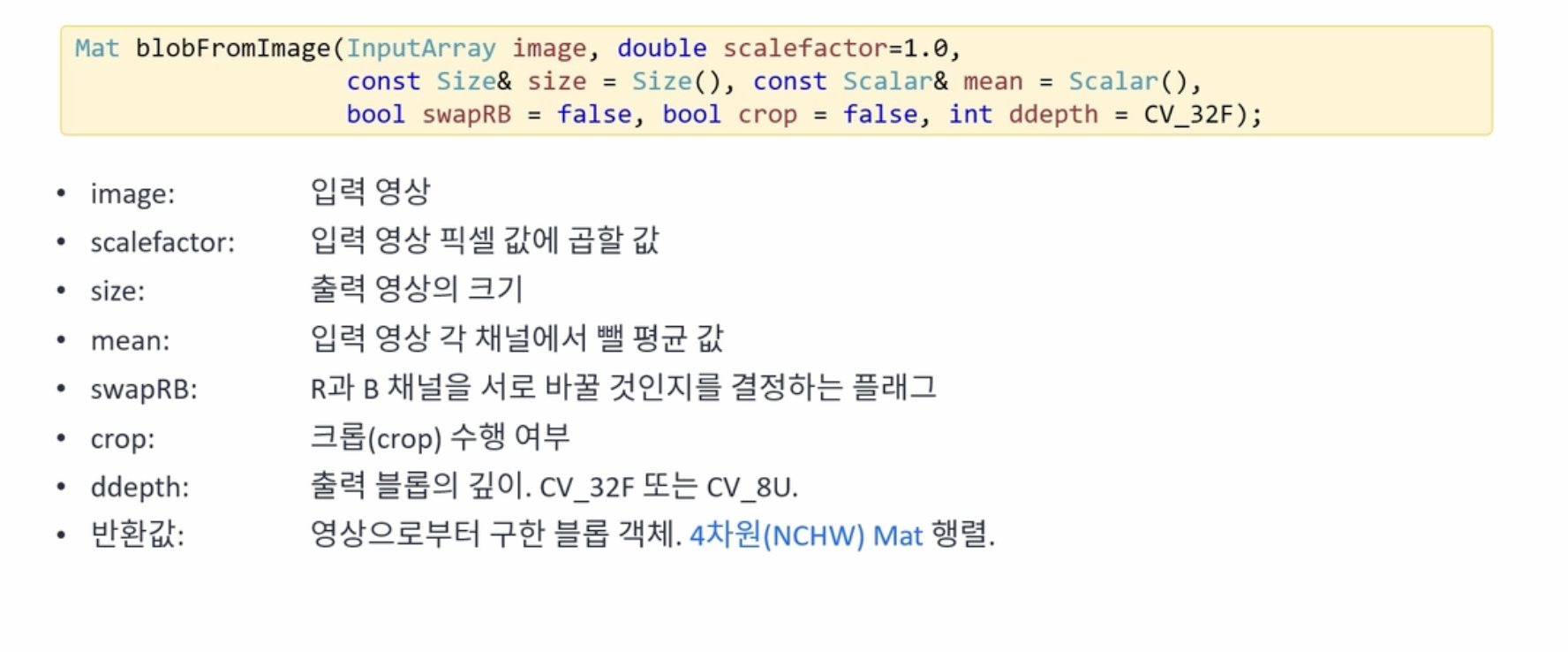
신경망의 입력 정의하기
-
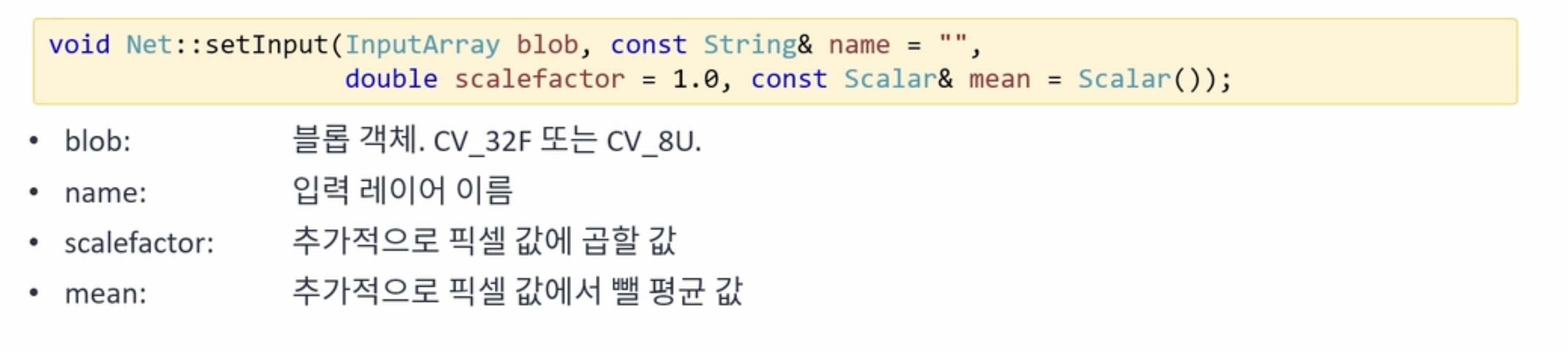
신경망 입력 설정하기
-
순방향 전파하기

pytorch 모델 학습
pytorch를 이용해서 데이터를 학습하고 학습된 모델을 mnist.onnx 파일로 저장한다.
import torch
import torch.nn as nn
import torchvision
import torchvision.transforms as transforms
# Device configuration
device = torch.device('cuda:0' if torch.cuda.is_available() else 'cpu')
# Hyper parameters
num_epochs = 5
num_classes = 10
batch_size = 100
learning_rate = 0.001
# MNIST dataset
train_dataset = torchvision.datasets.MNIST(root='./data/',
train=True,
transform=transforms.ToTensor(),
download=True)
test_dataset = torchvision.datasets.MNIST(root='./data/',
train=False,
transform=transforms.ToTensor())
# Data loader
train_loader = torch.utils.data.DataLoader(dataset=train_dataset,
batch_size=batch_size,
shuffle=True)
test_loader = torch.utils.data.DataLoader(dataset=test_dataset,
batch_size=batch_size,
shuffle=False)
# Convolutional neural network (two convolutional layers)
class ConvNet(nn.Module):
def __init__(self, num_classes=10):
super(ConvNet, self).__init__()
self.layer1 = nn.Sequential(
nn.Conv2d(1, 16, kernel_size=5, stride=1, padding=2),
nn.BatchNorm2d(16),
nn.ReLU(),
nn.MaxPool2d(kernel_size=2, stride=2))
self.layer2 = nn.Sequential(
nn.Conv2d(16, 32, kernel_size=5, stride=1, padding=2),
nn.BatchNorm2d(32),
nn.ReLU(),
nn.MaxPool2d(kernel_size=2, stride=2))
self.fc = nn.Linear(7*7*32, num_classes)
def forward(self, x):
out = self.layer1(x)
out = self.layer2(out)
out = out.reshape(out.size(0), -1)
out = self.fc(out)
return out
model = ConvNet(num_classes).to(device)
# Loss and optimizer
criterion = nn.CrossEntropyLoss()
optimizer = torch.optim.Adam(model.parameters(), lr=learning_rate)
# Train the model
total_step = len(train_loader)
for epoch in range(num_epochs):
for i, (images, labels) in enumerate(train_loader):
images = images.to(device)
labels = labels.to(device)
# Forward pass
outputs = model(images)
loss = criterion(outputs, labels)
# Backward and optimize
optimizer.zero_grad()
loss.backward()
optimizer.step()
if (i+1) % 100 == 0:
print ('Epoch [{}/{}], Step [{}/{}], Loss: {:.4f}'
.format(epoch+1, num_epochs, i+1, total_step, loss.item()))
# Test the model
model.eval() # eval mode (batchnorm uses moving mean/variance instead of mini-batch mean/variance)
with torch.no_grad():
correct = 0
total = 0
for images, labels in test_loader:
images = images.to(device)
labels = labels.to(device)
outputs = model(images)
_, predicted = torch.max(outputs.data, 1)
total += labels.size(0)
correct += (predicted == labels).sum().item()
print('Test Accuracy of the model on the 10000 test images: {} %'.format(100 * correct / total))
# Save the model checkpoint
torch.save(model.state_dict(), 'model.ckpt')
# onnx export
import torch.onnx
dummy_input = torch.randn(1, 1, 28, 28).to(device)
torch.onnx.export(model, dummy_input, "mnist.onnx")OpenCV에서 pytorch 모델 불러와서 필기체 인식하기
#include <iostream>
#include "opencv2/opencv.hpp"
using namespace std;
using namespace cv;
using namespace cv::dnn;
void on_mouse(int event, int x, int y, int flags, void* userdata);
Mat norm_digit(Mat& src)
{
CV_Assert(!src.empty() && src.type() == CV_8UC1);
Mat src_bin;
threshold(src, src_bin, 0, 255, THRESH_BINARY | THRESH_OTSU);
Mat labels, stats, centroids;
int n = connectedComponentsWithStats(src_bin, labels, stats, centroids);
Mat dst = Mat::zeros(src.rows, src.cols, src.type());
for (int i = 1; i < n; i++) {
if (stats.at<int>(i, 4) < 20) continue;
int cx = cvRound(centroids.at<double>(i, 0));
int cy = cvRound(centroids.at<double>(i, 1));
double dx = 14 - cx;
double dy = 14 - cy;
Mat warpMat = (Mat_<double>(2, 3) << 1, 0, dx, 0, 1, dy);
warpAffine(src, dst, warpMat, dst.size());
}
return dst;
}
int main()
{
// Net net = readNet("mnist.pb");
Net net = readNet("mnist.onnx");
if (net.empty()) {
cerr << "Network load failed!" << endl;
return -1;
}
Mat img = Mat::zeros(400, 400, CV_8UC1);
imshow("img", img);
setMouseCallback("img", on_mouse, (void*)&img);
while (true) {
int c = waitKey();
if (c == 27) {
break;
} else if (c == ' ') {
Mat blr, resized;
GaussianBlur(img, blr, Size(), 1.0);
resize(blr, resized, Size(28, 28), 0, 0, INTER_AREA);
Mat blob = blobFromImage(norm_digit(resized), 1/255.f, Size(28, 28));
net.setInput(blob);
Mat prob = net.forward();
double maxVal;
Point maxLoc;
minMaxLoc(prob, NULL, &maxVal, NULL, &maxLoc);
int digit = maxLoc.x;
cout << digit << " (" << maxVal * 100 << "%)" <<endl;
img.setTo(0);
imshow("img", img);
}
}
}
Point ptPrev(-1, -1);
void on_mouse(int event, int x, int y, int flags, void* userdata)
{
Mat img = *(Mat*)userdata;
if (event == EVENT_LBUTTONDOWN) {
ptPrev = Point(x, y);
} else if (event == EVENT_LBUTTONUP) {
ptPrev = Point(-1, -1);
} else if (event == EVENT_MOUSEMOVE && (flags & EVENT_FLAG_LBUTTON)) {
line(img, ptPrev, Point(x, y), Scalar::all(255), 40, LINE_AA, 0);
ptPrev = Point(x, y);
imshow("img", img);
}
}