1. ROS 설치하기
ROS 설치를 위한 과정을 진행한다. 버전에 따라 방법은 조금 달라질 수 있다. 본 게시물에서는 ubuntu 18.04에 melodic 버전을 설치하는 방법에 관하여 다룬다. 다른 버전도 설치는 비슷하며, reference의 링크를 참조하길 바란다.
준비물
- Ubuntu 18.04가 설치된 PC
- 자신감
1.1. sources.list에 ros repositorise 추가하기
$ sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'1.2. key 설정
$ sudo apt install curl # if you haven't already installed curl
curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add -1.3. apt update, package 설치
$ sudo apt update
$ sudo apt install ros-melodic-desktop-full1.4. 의존성 package 설치
$ sudo apt install python-rosdep python-rosinstall python-rosinstall-generator python-wstool build-essentialor
$ sudo apt install python-rosdep1.5. rosdep 초기화
$ sudo rosdep init
$ rosdep update1.6. shell 환경 셜정
$ echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
$ source ~/.bashrc1.7. roscore 실행 테스트
$ roecore2. ROS Workspace (WS) 구성하기
ROS Workspace의 구조
ROS를 통해 개발하기 위한 소스 코드를 빌드하고 실행시킬 수 있는 공간을 구성하는 단계이다. ROS의 Workspace의 구조은 다음과 같다.
├── ros_ws
├── build
├── devel
├── .catkin_workspace
└── src
├── CMakeLists.txt
├── package_1
│ ├── launch
│ │ └── *.launch
│ │ └── ...
│ ├── src
│ │ ├── *.py
│ │ └── ...
│ ├── msg
│ │ └── *.msg
│ │ └── ...
│ ├── rviz
│ │ └── *.rviz
│ │ └── ...
│ ├── ufdf
│ │ └── *.ufdf
│ │ └── ...
│ ├── CMakeList.txt
│ └── package.xml
└── package_2
...ros_ws 라는 이름의 작업 공간 안에는 src, build, devel 3가지 디렉터리가 존재하는 것을 확인 할 수 있다. src 디렉터리에 소스 코드를 작성하면 된다. workspace안에 소스코드나 패키지에 변화가 생기면 catkin_make 명령을 통해서 빌드(build)를 수행하여야 한다.
2.1. ROS 개발을 위한 Workspace의 디렉터리 생성 및 빌드
# 홈 디렛터리로 이동
$ cd
# ros_ws/src 디렉터리 생성
$ mkdir -p ~/ros_ws/src
# ros_ws 디렉터리로 이동
$ cd ros_ws
# ROS 개발 환경 셋업 (빌드), ROS 시스템이랑 디렉터리랑 연결시키는 과정
$ catkin_make2.2. .bashrc 수정
# ~/.bashrc
alias cm='cd ~/ros_ws && catkin_make'
alias cs='cd ~/ros_ws/src'
source /opt/ros/melodic/setup.bash
source ~/ros_ws/devel/setup.bash
export ROS_MASTER_URI=http://localhost:11311
export ROS_HOSTNAME=localhost수정 후 terminal에 반영한다.
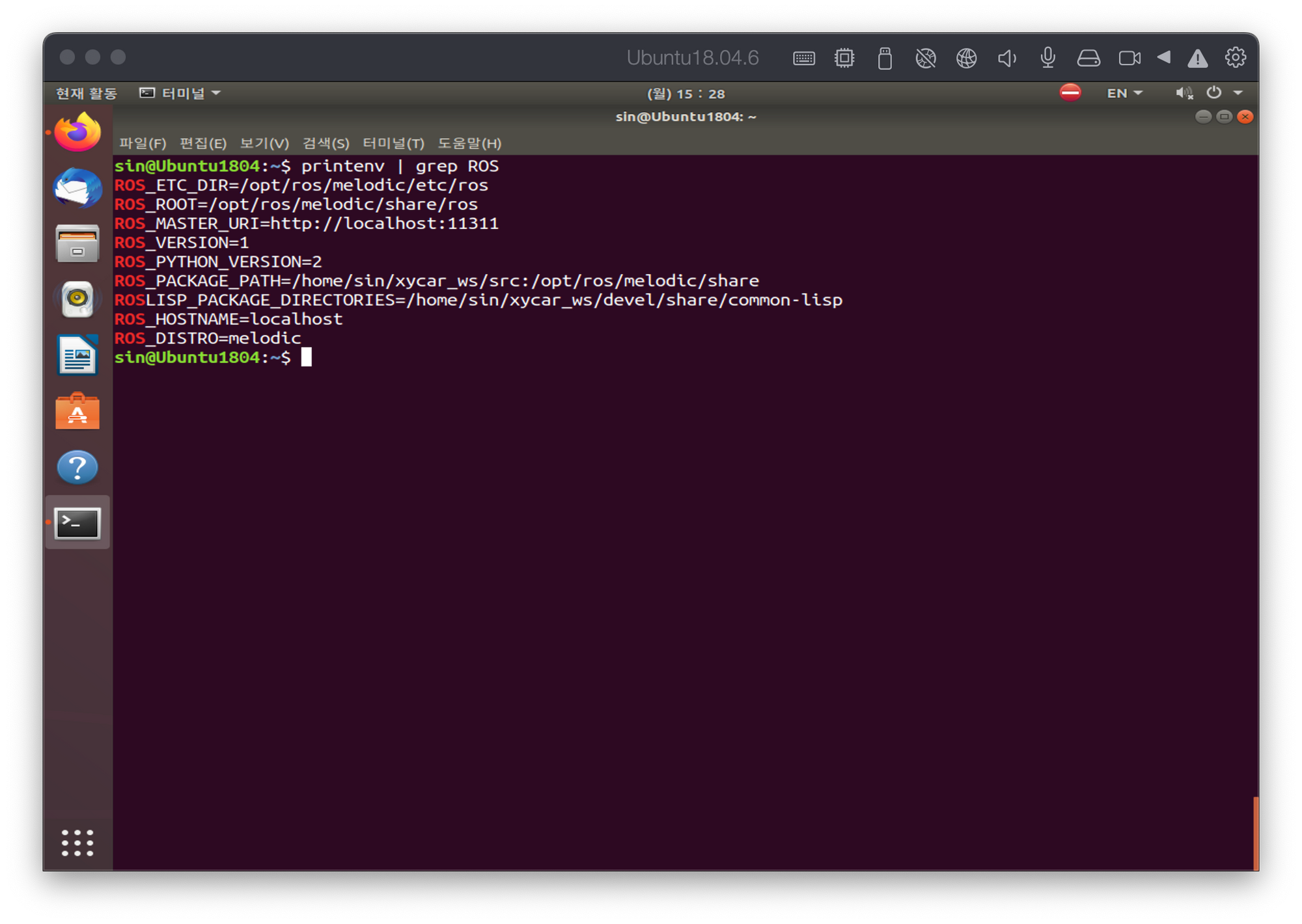
$ source ~/.bashrc2.3. 설정된 환경 변수 확인
$ printenv | ROS위 명령을 통해 다음과 같이 설정된 환경 변수들을 확인할 수 있다.