
🎃 문제 설명
지나다니는 길을 'O', 장애물을 'X'로 나타낸 직사각형 격자 모양의 공원에서 로봇 강아지가 산책을 하려합니다. 산책은 로봇 강아지에 미리 입력된 명령에 따라 진행하며, 명령은 다음과 같은 형식으로 주어집니다.
["방향 거리", "방향 거리" … ]
예를 들어 "E 5"는 로봇 강아지가 현재 위치에서 동쪽으로 5칸 이동했다는 의미입니다. 로봇 강아지는 명령을 수행하기 전에 다음 두 가지를 먼저 확인합니다.
주어진 방향으로 이동할 때 공원을 벗어나는지 확인합니다.
주어진 방향으로 이동 중 장애물을 만나는지 확인합니다.
위 두 가지중 어느 하나라도 해당된다면, 로봇 강아지는 해당 명령을 무시하고 다음 명령을 수행합니다.
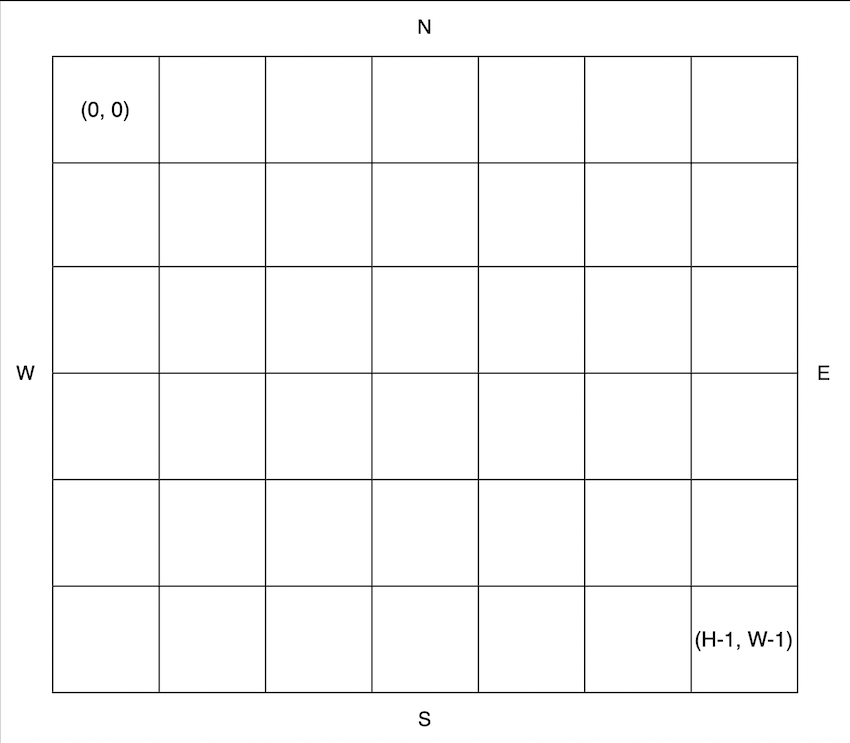
공원의 가로 길이가 W, 세로 길이가 H라고 할 때, 공원의 좌측 상단의 좌표는 (0, 0), 우측 하단의 좌표는 (H - 1, W - 1) 입니다.
공원을 나타내는 문자열 배열 park, 로봇 강아지가 수행할 명령이 담긴 문자열 배열 routes가 매개변수로 주어질 때, 로봇 강아지가 모든 명령을 수행 후 놓인 위치를 [세로 방향 좌표, 가로 방향 좌표] 순으로 배열에 담아 return 하도록 solution 함수를 완성해주세요.
🥈 제한사항
- 3 ≤
park의 길이 ≤ 50- 3 ≤
park[i]의 길이 ≤ 50park[i]는 다음 문자들로 이루어져 있으며 시작지점은 하나만 주어집니다.S: 시작 지점O: 이동 가능한 통로X: 장애물
park는 직사각형 모양입니다.
- 3 ≤
- 1 ≤
routes의 길이 ≤ 50routes의 각 원소는 로봇 강아지가 수행할 명령어를 나타냅니다.- 로봇 강아지는
routes의 첫 번째 원소부터 순서대로 명령을 수행합니다. routes의 원소는"op n"과 같은 구조로 이루어져 있으며,op는 이동할 방향,n은 이동할 칸의 수를 의미합니다.op는 다음 네 가지중 하나로 이루어져 있습니다.N: 북쪽으로 주어진 칸만큼 이동합니다.S: 남쪽으로 주어진 칸만큼 이동합니다.W: 서쪽으로 주어진 칸만큼 이동합니다.E: 동쪽으로 주어진 칸만큼 이동합니다.
- 1 ≤
n≤ 9
🚲 풀이
먼저 S의 위치, 즉 시작 위치를 찾는다.
이후 routes 를 loop 돌면서 이동할 방향을 swtich-case 문을 통해 구해준다.
그방향을 토대로 도착위치가 park에서 벗어나지 않는다면, 거리를 기반으로 가는 길을 check 해준다.
가는 도중에 장애물이 있는 경우 현재의 위치를 업데이트 하지 않는다.
위의 방식을 기반으로 해결한다면 쉽게 문제를 풀 수 있다.
🦮 코드
#include <string>
#include <vector>
#include <iostream>
#define pii pair<int, int>
using namespace std;
vector<int> solution(vector<string> park, vector<string> routes) {
vector<int> answer;
pii nowDir;
// get Start Dir
for (int i = 0; i < park.size(); i++) {
for (int j = 0; j < park[i].size(); j++) {
if (park[i][j] == 'S') nowDir = make_pair(i, j);
}
}
// ck Routes
for (int k = 0; k < routes.size(); k++) {
char dir = routes[k][0];
int dist = routes[k][2] - '0';
int dirY = 0, dirX = 0;
switch (dir) {
case 'E':
dirX = 1;
break;
case 'W':
dirX = -1;
break;
case 'S':
dirY = 1;
break;
case 'N':
dirY = -1;
break;
};
if ((nowDir.first + (dirY * dist) < park.size() && nowDir.first + (dirY * dist) >= 0) && (nowDir.second + (dirX * dist) < park[0].size() && nowDir.second + (dirX * dist) >= 0)) {
int j;
for (j = 1 ; j <= dist; j++) {
if (park[nowDir.first + (dirY * j)][nowDir.second + (dirX * j)] == 'X') break;
}
if (j > dist) {
nowDir.first += (dirY * dist);
nowDir.second += (dirX * dist);
}
}
}
answer = {nowDir.first, nowDir.second};
return answer;
}👨👩👧 어려웠던 점
- 로봇이 가는 도중에 장애물이 있는 경우를 생각하지 못함
→ 도착위치만 생각하고 해결하였었는데도착위치는 장애물이 없지만,가는 도중장애물이 있는 경우를 체크하지 않아 오래걸렸다. .
