📖 순차 논리
- 순서라는 말에서 비롯된 용어
- '시간적으로 어떤 값 뒤에 오는 다른 값'이라는 뜻
- 2장에서 배운 조합 논리가 입력의 현재 상태만을 다뤘다면,
순차 논리는 입력의 현재 상태와 과거 상태를 함께 고려
📖 시간 표현과 상태 기억
- 우리는 주기 함수를 사용해 시간을 측정할 수 있음
- 예) 지구의 자전이 주기적 함수임
👉 지구가 한 바퀴를 다 돌면 이를 하루(1일)라고 부름- 컴퓨터의 경우 전자공학을 사용하기 때문에 주기적인 전기 신호가 필요
진자가 스위치를 때리게 하면 이런 신호를 만들 수 있으나 현재는 좀 더 현대적인 접근 방법들로 접근함
📕 발진자
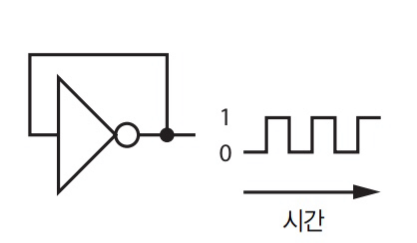
- 그림을 보면 인버터의 출력을 입력에 연결할 수 있음
- 이런 연결을 되먹임(feedback, 피드백)이라고 함
(마이크와 스피커를 가까이 위치 시킬 때 생기는 현상과 같음)- 인버터 출력은 다시 인버터 입력으로 들어가고 이 입력은 다시 출력에 반영됨
👉 이로 인해 출력이 0과 1 사이를 진동함- 해당 값이 진동하는 속도는 전파지연에 따라 결정되며, 온도에 따라 달라지는 경향이 있음 (단점)
- 좀 더 안정적인 주파수로 진동하는 발진자가 있다면 더 정확히 시간을 측정할 수 있는 기준이 될 것임
🤔 정확한 발진자를 적은 비용으로
효율적으로 만드는 방법❓
👉 크리스털을 활용하기!
- 전극을 크리스털(결정이라는 뜻)에 연결하고 크리스털을 압축하면 크리스털이 전기를 만들어냄
- 전극에 전기를 가하면 크리스털이 구부러짐
- 이런 현상을 피에조 전기 또는 압전 효과라고 부름
- 압전 효과는 여러 가지로 응용할 수 있는데, 크리스털은 음성 진동을 잡아낼 수 있어 마이크를 만들 때 이를 쓸 수 있음
- 또한 크리스털에 전기를 가해 음성 진동을 만들어냄으로써 여러 전기 기구에서 다양한 경보음을 낼 수 있음
- 크리스털 발진자는 진자적인 단극쌍투 스위치를 사용해 크리스털에 전기를 가해서 다시 전기를 얻어냄
- 입력한 전기로부터 크리스털이 전기를 다시 만들어내는 시간은 예측이 가능하며 매우 정확함
- 특히 석영이 이런 목표로 사용할 수 있는 가장 좋은 크리스털 고체 물질임
📙 클록
- 발진자를 사용하면 시간을 잘 측정할 수 있음
- 발진자는 컴퓨터에 클록을 제공함
- 컴퓨터 클록은 밴드에서 드러머가 박자를 맞춰 드럼을 치는 것과 같음
- 클록은 회로의 페이스를 결정하며 회로의 최대 클록 속도나 가장 빠른 템포는 회로의 전파 지연 시간에 의해 결정됨
🤔 컴퓨터 제작에 필요한 통계❓
- 컴퓨터 컴포넌트 제작에는 여러 가지 통계가 필요함
👉 컴포넌트를 이루는 부품들 사이에 편차가 크기 때문
📗 비닝
- 비닝(=바구니에 넣는다는 뜻) 과정은 부품을 측정해서 그 특성에 따라 여러 다른 빈이나 무더기로 분류함
- 지연 시간이 짧아서 빨리 반응할 수 있는 부품은 가장 가격이 높은 빈에 들어가고 더 느리고 더 싼 부품은 다른 빈에 들어가며, 이런 분류를 여러 단계의 빈을 사용해 반복함
- 빈 개수가 무한하면 실용적이지 못하기 때문에 부품 전체의 편차보다는 더 작은 편차를 갖도록 부품을 빈에 나눠 담음
- 이런 이유로 부품의 전파 지연 시간을 표시할 때도 범위를 사용함
- 생산자는 전형적인 값과 함께 최솟값과 최댓값을 제공함
- 일반적인 논리 회로 설계 오류는 최댓값이나 최솟값을 사용하지 않고 전형적인 값을 사용하기 때문에 생김
📗 오버클로킹
- 오버클로킹 한다는 말은 통계적으로 빈의 중간 정도에 위치하는 부품을 부품이 고장 나지 않을 범위 안에서 클록을 빠르게 공급하는 도박을 한다는 뜻
📘 래치- OR 게이트/ AND-OR 게이트/ S-R
OR 게이트 래치
- 그림처럼 OR 게이트의 출력을 입력에 묶는 방식의 되먹임을 사용하면 정보를 기억할 수 있음
- 이 회로는 값을 반전시키지 않기 때문에 발진자에서 본 회로와 달리 진동을 만들어내지는 않음
- OR 게이트 회로 out이 0부터 시작한다고 가정함
👉 in이 1이 되면 out도 1이 됨
👉 출력이 게이트의 (in이 아닌 다른 쪽) 입력에 연결되어 있기 때문에 이제부터는 out이 1로 유지됨
👉 in이 0이 돼도 출력은 그대로 1로 유지됨
👉 결론: 이 회로는 자신의 과거 상태를 기억한다
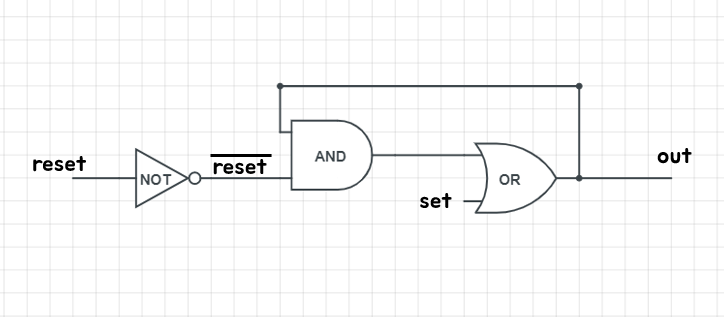
AND-OR 게이트 래치
- OR 회로만으로는 out을 다시 0으로 만들 방법이 없기 때문에 약간의 추가 작업이 필요함
👉 그림처럼 되먹임을 끊고 회로를 재설정할 방법이 필요함- 인버터의 출력을 reset 위에 선을 그어 표현함
- 하드웨어 기호 위에 선을 그으면 반전을 뜻함
👉 이 값이 0일 때 참이고 이 값이 1일 때 거짓이라는 뜻
👉 때로 이를 액티브 하이에 반대되는 액티브 로우라고 부름
👉 참(=액티브, 활성화 상태)을 표현하기 위해 액티브 하이의 1 대신 액티브 로우에서는 0을 사용함
👉 이렇게 위에 그은 선을 바라고 읽음
👉 따라서 reset(바)를 말로 읽을 때는 '리셋 바'라고 읽음
- reset(바)가 로우이면 reset은 하이이므로 OR 게이트의 출력은 OR 게이트의 입력에 되먹임 됨
- reset(바)가 하이로 가면 reset은 로우가 되고 그에 따라 되먹임이 깨지고 out은 0이됨
S-R 래치
- S-R 래치는 좀 더 똘똘하게 1비트 메모리를 만드는 방법임
- S-R이라는 말은 set-reset(설정-재설정)을 뜻함
- 이들은 액티브 로우 입력을 받고 보수 출력을 제공함
- 보수 출력이라는 말은 출력의 한쪽은 액티브 하이, 다른 족은 액티브 로우라는 뜻임
- NOR 게이트를 사용하면 입력이 액티브 하이인 S-R 래치를 만들 수 있지만, NAND 게이트보다 NOR 게이트가 더 전력을 많이 사용하고, 더 복잡하며, 만드는 비용도 더 많이 듦
- set와 reset가 참(로우)인 경우는 두 출력이 모두 참이라서 이상하기 때문에 이런 입력은 사용하면 안 됨
- 두 입력이 모두 동시에 거짓(하이)으로 바뀌는 경우에는 전파 지연 시간에 따라 출력이 달라지기 때문에 결과를 예측할 수 없음
- 그림3-5의 회로는 그림 3-4의 회로와 달리 설계가 대칭적이라는 좋은 특성이 있음
👉 회로가 대칭이기 때문에 set과 reset 신호의 지연 시간이 거의 비슷하다는 뜻

🔔 오늘의 퀴즈 ❗
- 정확한 발진자를 적은 비용으로 효율적으로 만드는 방법은?
👉 마이크를 키고 답변 해주세요!
👀잘 듣고 있으셨죠? 믿습니다 여러분👀
👉 힌트: _ _ _ _을 활용하기!
🍒 참고하면 좋을 자료 🍒
📘 나무위키 인버터 설명 (클릭)
📘 위키백과 결정 진동자 설명 (클릭)
📘 OR 게이트 래치 설명 아래 그림 출처 (클릭)
📢 CS 스터디의 내용은
<한 권으로 읽는 컴퓨터 구조와 프로그래밍>책을
기반으로 하며, 오늘의 내용은 👉 p.135~140 👈에 있습니다!
우당탕탕 알다가도 모를 코딩 Life