로보틱스 자료조사
산업 로봇과 비산업 로봇
산업 로봇
- 제조업, 물류, 조립 라인에서 활용되어 반복적인 작업을 자동화하는데 초점
비산업 로봇
- 서비스, 의료, 가정, 교육 등에서 활용되며,특정한(Specific)한 작업보다는 유연성을 필요로함
- ex. 로봇 청소기, 수술로봇, 서빙 로봇
SW와의 결합
- ROS
- AI / ML
- Computer Vision
- Cloud
- Edge Computing
⇒ 결국 로봇의 자유도를 크게 증가시키는 역할을 함
ROS (Robot OS)
- 로봇 소프트웨어 개발을 위한 오픈소스 프레임워크
- 라이브러리 제공
- 로봇 제어에 필요한 3가지 요소들을 통합하여 관리할 수 있도록 함
- actuators: 실제로 로봇이 움직이도록 하는 장치
- sensors: 외부 환경을 인식 & 데이터 수집
- control system: sensor를 통해 수집한 데이터로 actuator를 조정하는 역할을 함
Robot with AI
- 기본적으로 센서로 파악한 데이터로 결정을 내리는 과정에서 사용됨
- 강화학습
- Agent가 State(상태)에 따라 특정 Action을 취하고, 이에 따라 보상을 받는 방식의 학습 방법
- 학습 과정에서 보상을 최대화하도록 최적화된다.
- ex. 자율 주행, 로봇 팔 등
Computer Vision
- 단순한 센서(빛, 열 등)를 통한 인지가 아니라, 카메라로 현재 상태를 인지하고, 이에 따른 행동을 할 수 있도록 함
- 물체 인식, 장애물 회피, 경로 계획 등이 가능함
- SLAM(Simultaneous Localization and Mapping)
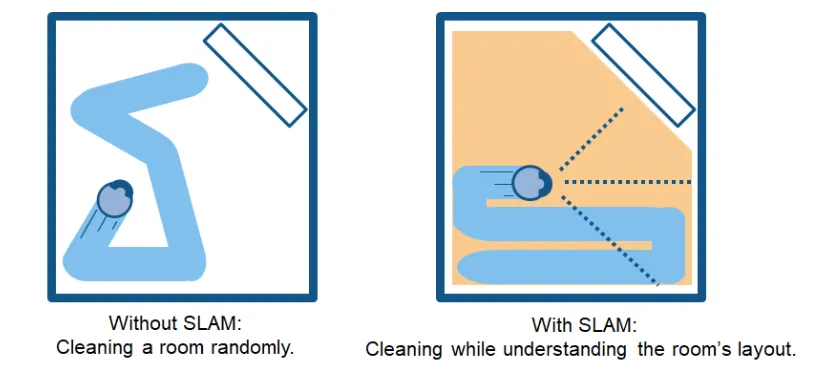
- FE: 센서에 의존해서 데이터를 수집, Feature 추출
- BE: Map estimation
- 딥러닝과 결합하여 사람처럼 판단하고, 행동하는 것이 가능하도록 함
IoRT(Internet of Robotic things)
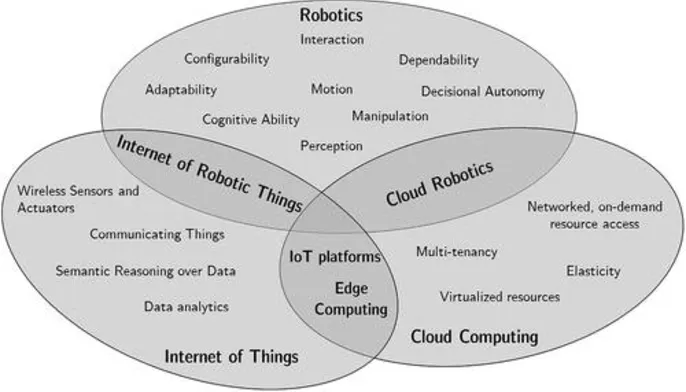
- IoT: 사물 인터넷
- 인터넷을 통해 연결된 물리적 장치들
- 각 장치가 센서를 통해 환경에 대한 정보를 습득하고, 인터넷을 통해 데이터를 주고 받고, 실제로 행동으로까지 이어짐
- ex. 온도 조절기, 스마트 잠금 장치
- IoRT는 이를 로봇에 적용하여, 로봇들이 인터넷을 통해 연결되어 소통하고 의사결정을 내림
- 결국 다른 로봇과 인터넷을 통해 협력하는 것.
- 클라우드 컴퓨팅, 엣지 컴퓨팅과의 결합
- ex. 스마트 물류 시스템, 스마트 팩토리
Robot as a Service
- 로봇의 하드웨어와 소프트웨어를 구독 방식으로 제공 → 초기 비용 절감 & 유연성 확장
- cf. IaaS(Infrastructure as a Service)
- 서버, 스토리지, 네트워크 등 인프라를 서비스로 제공하는 모델
- ex. AWS
- 서버, 스토리지, 네트워크 등 인프라를 서비스로 제공하는 모델
Cobot (Collaborative Robot)
- 인간과 협력하여 Task를 수행하는 로봇
- 기존 산업 로봇과의 차이점
- 여러가지 작업을 다양한 환경에서도 할 수 있음
- 인간과 상호작용함
- ex. 조립 라인, 수술 로봇

나의 삽질이 미래의 누군가를 구할 수 있다면...