Inverse Kinematics (IK)는 3D 애니메이션과 로보틱스에서 주로 사용되는 기법으로, 최종 목표 지점을 지정하면 중간 조인트(관절)들을 자동으로 계산하여 목표 지점에 도달하는 방법을 결정하는 알고리즘이다.
쉽게 말하면, 끝 점(예: 손, 발)이 특정 위치로 이동할 때, 그에 맞춰 팔꿈치, 어깨와 같은 중간 관절들을 계산하여 자연스러운 동작을 구현하는 기법이다.
IK(Inverse Kinematics)에서 쿼터니언(Quaternion)과 오일러 각(Euler Angles)은 회전(rotation)을 표현하는 두 가지 방법이다. 둘은 수학적으로 비슷한 목적을 가지고 있지만, 차이점과 각 방법이 IK 시스템에서 어떻게 활용되는지 이해하는 것이 중요하다.
1. 오일러 각 (Euler Angles)
오일러 각은 3차원 공간에서 물체의 회전을 세 개의 축(x, y, z)을 기준으로 나타내는 방식이다. 오일러 각은 각 축에 대해 roll, pitch, yaw라는 세 가지 값을 사용하여 회전을 표현한다.
Roll: x축을 중심으로 회전 (주로 좌우 회전)
Pitch: y축을 중심으로 회전 (주로 상하 회전)
Yaw: z축을 중심으로 회전 (주로 좌우 회전)
장점:
직관적이고 사람이 이해하기 쉬운 방식이다. 각 축에 대한 회전 값이 명확하게 구분된다.
단점:
Gimbal Lock: 오일러 각은 특정한 각도(90도)에 도달하면 회전이 "잠긴" 상태가 되어, 자유로운 회전이 불가능해지는 문제가 있다.
회전 순서 문제: 오일러 각은 회전 순서에 따라 결과가 달라질 수 있다.
예를 들어, X, Y, Z 순으로 회전하는 것과 Y, X, Z 순으로 회전하는 것은 다르게 동작할 수 있다.
IK에서의 활용:
직관적인 조정: 특정 축에 대한 회전을 제어하는 데 유용할 수 있다. IK 시스템에서 팔, 다리의 움직임을 오일러 각으로 설정하는 경우, 축별로 명확하게 회전 값을 제어할 수 있다.
간단한 회전 구현: 작은 각도 회전에서는 오일러 각이 더 간단하게 사용할 수 있다.
2. 쿼터니언 (Quaternion)
쿼터니언은 4차원 수학적 객체로, 3D 회전 문제를 해결하는 데 사용된다. 회전 축과 회전 각도를 함께 나타내며, 회전의 계산이 더 간단하고 안정적이다. 쿼터니언은 w, x, y, z의 네 개의 값으로 회전을 표현한다.
장점:
Gimbal Lock이 없다: 쿼터니언은 회전의 표현에서 Gimbal Lock이 발생하지 않기 때문에 회전이 자유롭게 가능하다.
회전 계산이 효율적: 회전의 합성, 보간 등 연산이 간단하고 빠른 계산을 제공한다.
회전의 연속성: 오일러 각과 달리, 회전 순서에 의존하지 않고 회전의 연속성이 유지된다.
단점:
직관적이지 않음: 사람이 이해하기 어려운 방식으로, 쿼터니언 회전은 시각적으로 바로 확인할 수 없어서 디버깅이나 직관적 조정이 어렵다.
IK에서의 활용:
부드러운 회전: 쿼터니언은 IK 시스템에서 부드러운 회전을 구현할 때 유용하다.
예를 들어, 팔꿈치나 무릎의 방향을 자연스럽게 보간하는 데 적합하다.
회전 보간(Interpolation): IK에서는 회전 보간이 중요한데, 쿼터니언을 사용하면 회전의 보간이 부드럽고 안정적이다. Slerp(Spherical Linear Interpolation) 같은 보간 방식을 사용하면 자연스러운 회전이 가능하다.
3. IK 시스템에서의 활용 차이점
오일러 각:
오일러 각은 각 축을 기준으로 독립적인 회전을 다루기 때문에 간단한 회전 조정에 유리하다.
단순한 동작이나 제어가 직관적인 경우에 사용할 수 있다.
하지만, 복잡한 회전이나 여러 축을 포함하는 회전에서는 Gimbal Lock 등의 문제로 예상치 못한 결과가 나올 수 있다.
쿼터니언:
쿼터니언은 부드러운 회전과 회전 보간이 중요할 때 유용하다.
복잡한 IK 계산에서 쿼터니언을 사용하면, 회전 합성이나 보간이 안정적이고, 여러 축을 한 번에 처리할 수 있기 때문에 회전이 자연스럽고 안정적이다.
또한, Gimbal Lock 문제를 피할 수 있기 때문에, 복잡한 회전 계산에서 매우 유리하다.
추가)
IK와 FK의 차이점
Forward Kinematics(FK, 순방향 운동학)는 IK의 반대 개념이다.
Forward Kinematics (FK, 순방향 운동학)
부모 관절에서 자식 관절로 순차적으로 회전하여 최종 위치(손, 발)를 결정하는 방식이다.
각 관절의 회전값을 직접 조정해야 한다.
손이나 발을 특정 위치에 놓고 싶을 때, FK에서는 각 관절을 직접 조정해야 하므로 번거로울 수 있다.
예제 (팔 움직임)
어깨 → 팔꿈치 → 손 순으로 회전시키며 손의 위치를 결정.
손의 위치를 바꾸려면 각 관절을 직접 조정해야 한다.
Inverse Kinematics (IK, 역운동학)
목표 위치(손, 발)를 정해두면, 시스템이 자동으로 각 관절의 회전값을 계산하여 자연스러운 움직임을 만들어준다.
캐릭터가 어떤 물체를 잡거나 발을 특정 위치에 고정할 때 자동으로 관절이 조정된다.
자연스럽고 부드러운 움직임을 제공할 수 있다.
예제 (팔 움직임)
손을 특정 위치로 이동시키면, 시스템이 어깨와 팔꿈치의 회전값을 자동으로 계산하여 손이 그 위치에 도달하도록 한다.
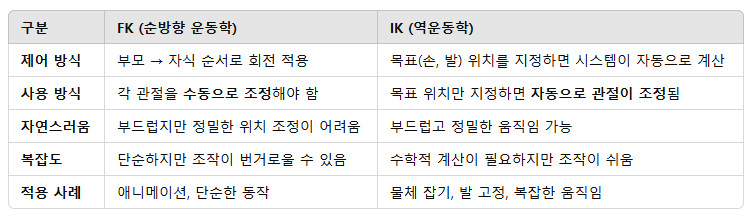
FK 활용 예제
애니메이션 키프레임 제작: 예를 들어, 펀치 애니메이션을 만들 때 팔꿈치와 어깨를 직접 회전시키며 조정.
로봇 팔 제어: 로봇이 특정한 각도로 움직여야 할 때, FK를 이용해 각도를 하나씩 조정.
IK 활용 예제
게임에서 캐릭터 손으로 물체 잡기: IK를 사용하면 손의 위치를 설정하면 자동으로 팔꿈치와 어깨의 위치가 조정된다.
캐릭터 발 고정 (지형 적응): 경사진 지형에서 캐릭터가 발을 자연스럽게 배치하도록 IK 적용.
