1. CMake란?
- 개요
- 크로스 플랫폼 지원
- 빌드 자동화, 테스트, 소프트웨어 패키징 및 설치 도구
- 컴파일러에 독립적
- 빌드 파일을 생성(빌드 시스템이 아님)
- 디렉토리 구조와, 여러 라이브러리에 의존하는 응용 프로그램을 지원
- CMake 빌드 2단계
- ① Generate
- CMakeLists.txt 파일을 분석하여 C++ 프로젝트의 구조 파악
- 빌드를 위한 컴파일러와 빌드 시스템 확인
- 모든 소스코드 및 종속성 확인
- ② Build
- 세팅한 빌드 시스템에 맞추어 빌드 커맨드를 생성
- ① Generate
2. 내가 이해한 대로 빌드해보기
2.1. 디렉토리 구조
- hello_cmake
-
CMakeLists.txt
cmake_minimum_required(VERSION 3.10) set(PACKAGE_NAME HELLO_CMAKE) project(${PACKAGE_NAME} LANGUAGES CXX) set(CMAKE_CXX_STANDARD 14) set(CMAKE_CXX_STANDARD_REQUIRED ON) add_executable(${PACKAGE_NAME}_MAIN ./main.cpp) -
build: empty directory
-
main.cpp
#include <iostream> int main() { std::cout << "Hello, World!" << std::endl; return 0; }
-
2.1. 터미널에서 빌드
- CMake 설치
$ sudo apt install -y cmake
-
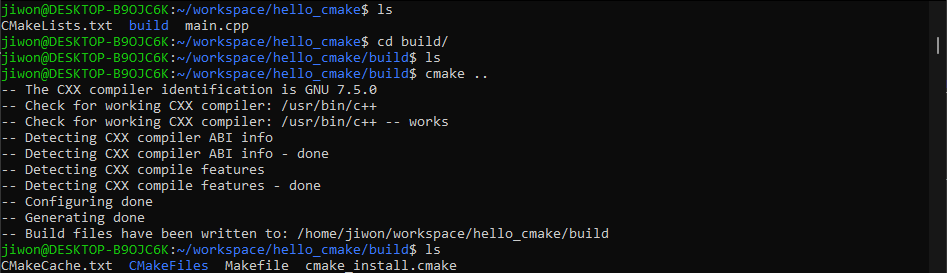
프로젝트 디렉토리 구조를 확인한다.
-
build 폴더로 이동한다.
-
build 폴더가 비어있다.
-
generate 단계: 빌드를 위한 환경설정
$ cmake -DCMAKE_BUILD_TYPE=Debug -GNinja -DCMAKE_INSTALL_PREFIX=../install ../opencv/
-DCMAKE_BUILD_TYPE: debug와 release 옵션 설정-GNinja: build system(=generator) 설정- MAKE는 UNIX의 기본 빌드 시스템
- Ninja는 빌드 프로세스를 효율적으로 실행하고, 빌드 시간을 최소화
-DCMAKE_INSTALL_PREFIX: 로컬 파일 설치를 위한 경로 지정(install 저장 위치 설정)- 기본 위치는 /usr/local/include/, /usr/local/lib/
- 저장 위치 변경하여 라이브러리 충돌을 방지
../opencv/: 최상위 CMakeLists.txt가 위치한 디렉토리
-
build 폴더에 파일들이 생성됐다.

$ make -j7: CPU 코어 7개를 사용하여 프로젝트를 빌드한다.- build 폴더에 실행 파일(HELLO_CMAKE_MAIN)이 생성됐다.
- 실행 파일을 실행한다.
- "인사 잘~한다"
Thirdparty build 후 예시(OpenCV) 참고build/Makefile
Make 빌드 시스템이 사용할 수 있는 커맨드를 모아둠빌드 후 라이브러리
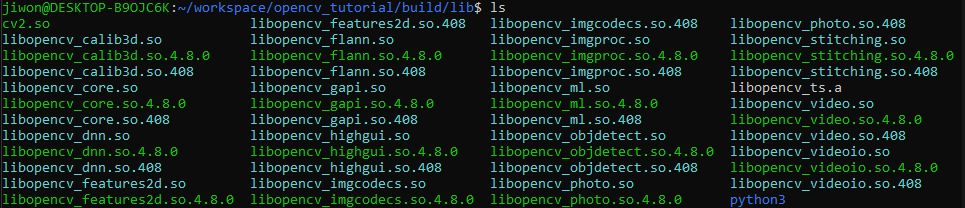
C++ 프로그램에 OpenCV를 링크할 수 있도록 하는 필요한 모든 파일들을 /install 디렉토리에 넣기$ sudo make install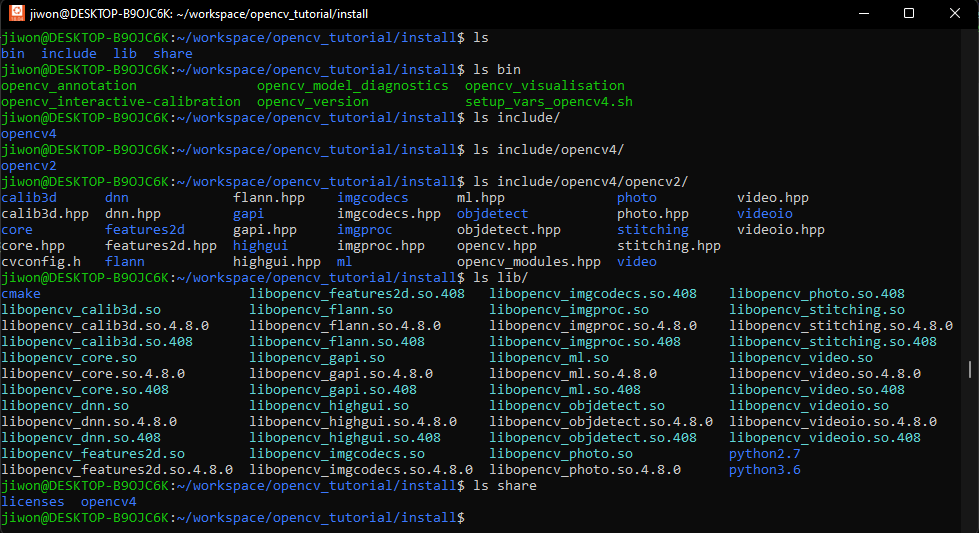
2.2. VS Code에서 빌드
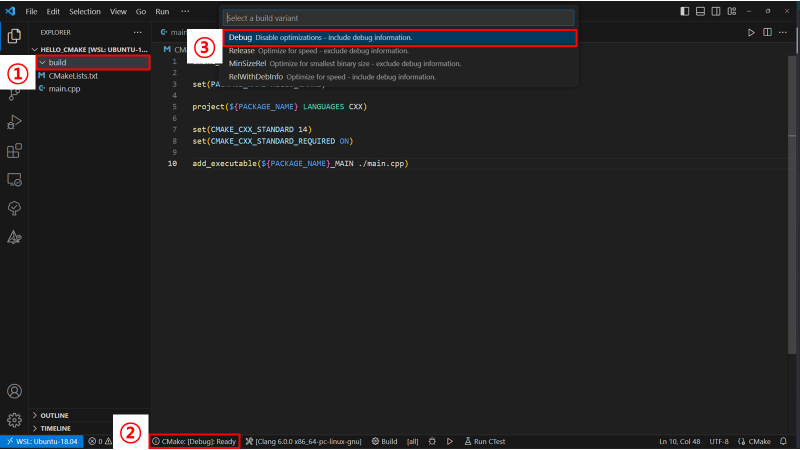
- ① build 폴더가 비어있다.
- ②, ③ 빌드 타입을 'Debug'로 설정한다.
- Debug: 디버그 최적화
- Release: 속도 최적화, 배포에 사용
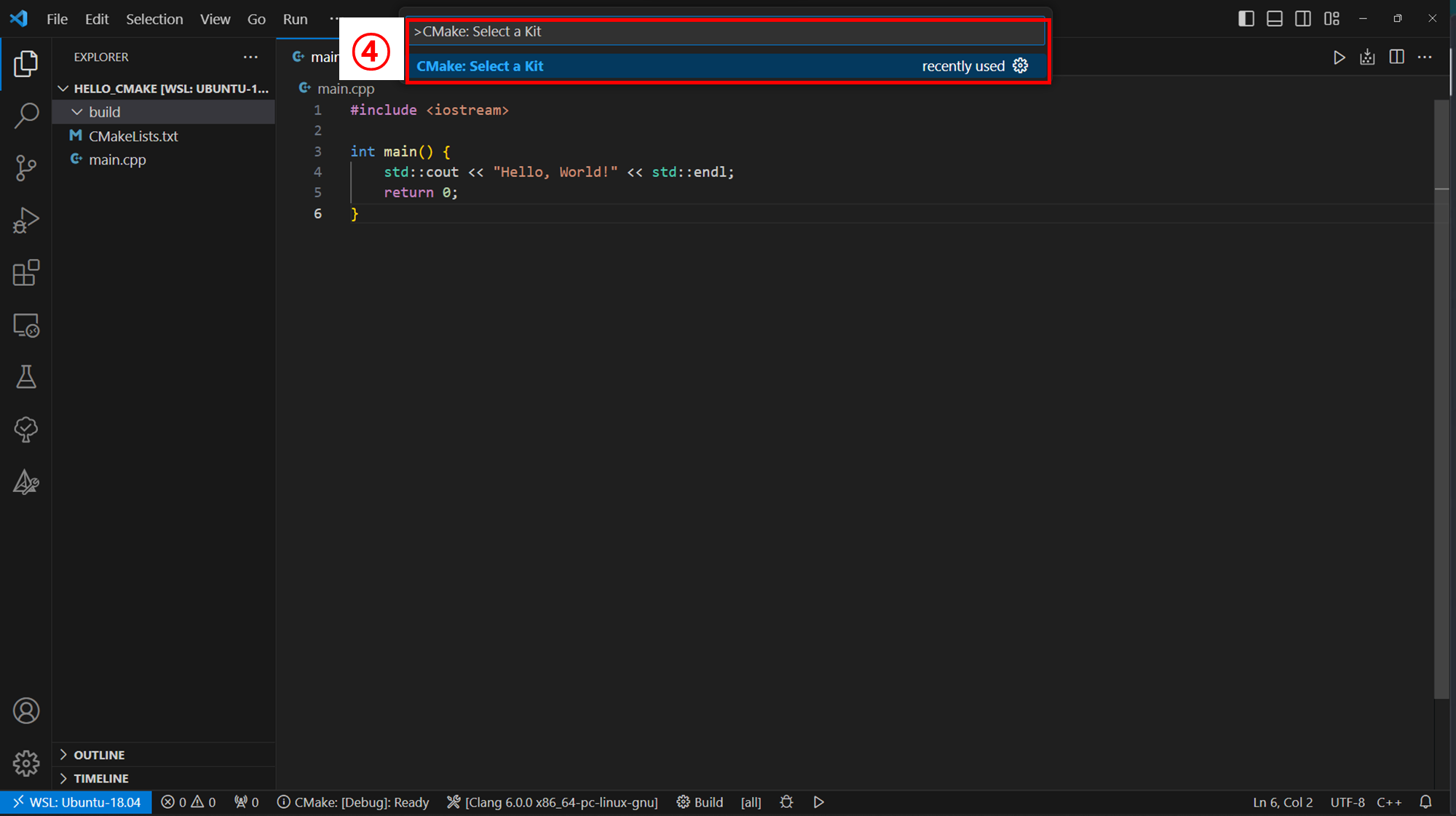
- ④
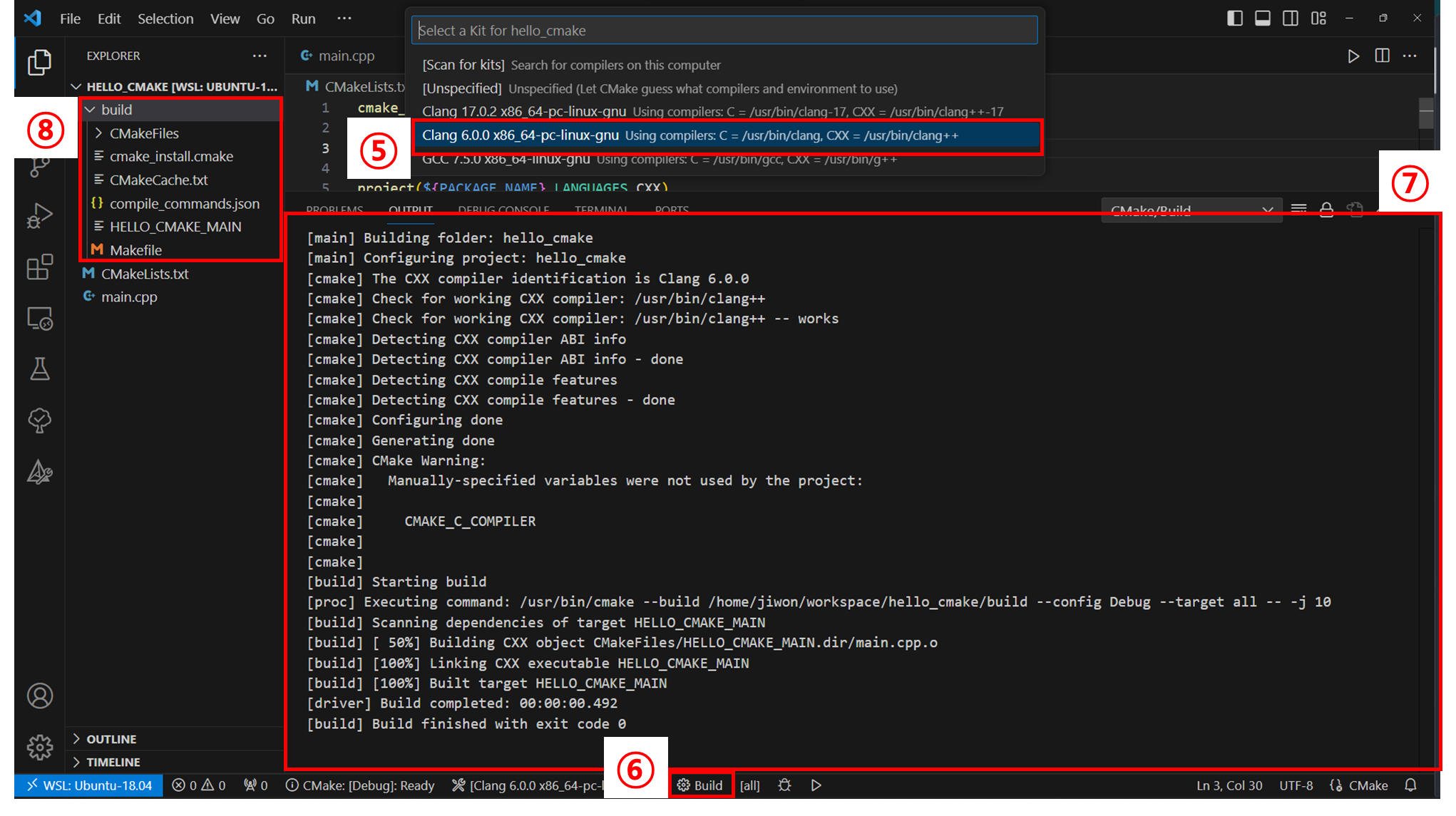
<CTRL+SHIFT+P>키보드 입력 후 'CMake: Select a Kit'을 입력한다. - ⑤ 컴파일러를 설정한다. 나는 Clang 6.0.0으로 설정했다.
- ⑥ 빌드한다.
- ⑦ 빌드 완료.
- ⑧ build 폴더에 파일들이 생성됐다.
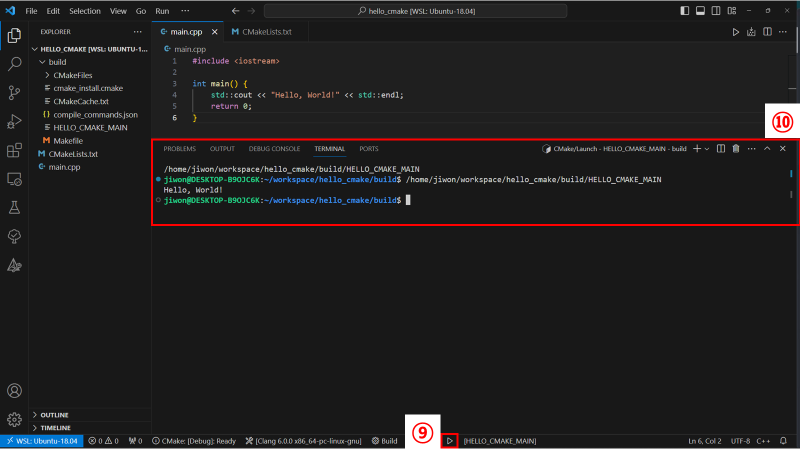
- ⑨ 실행 파일을 실행한다.
- ⑩ "인사 잘~한다"
3. C++ 프로젝트 디렉토리 구조 만들기
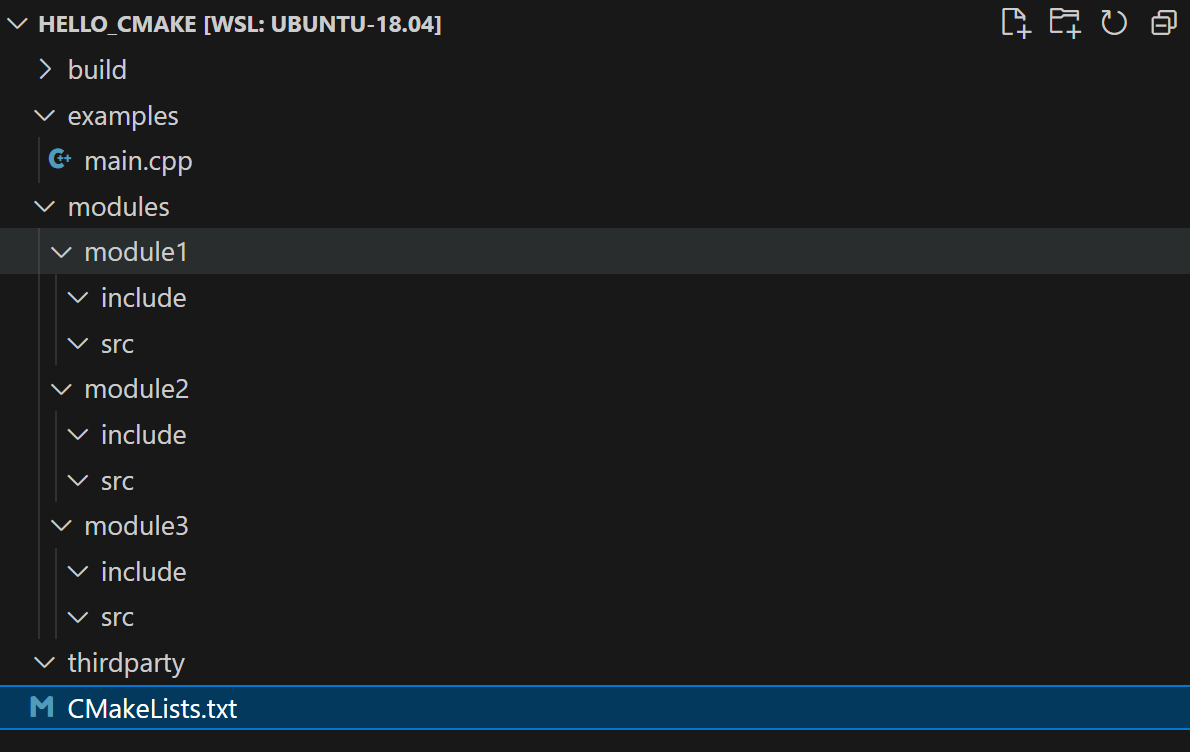
- modules: 라이브러리
- examples: 모든 코드의 entry point(main)
- thirdparty: 모든 서드파티 라이브러리를 로컬하게 설치
Dockerfile: docker 파일scripts: shell scriptconfig: configurationdata: datadocs: documenttest: testresources: test에 사용할 resource
4. Build Tutorial
4.1. OpenCV를 사용하는 라이브러리 하나 빌드
-
OpenCV install
- thirtparty 폴더에 OpenCV 폴더 생성
- OpenCV 폴더에 OpenCV 클론(opencv 폴더가 생성됨)
- OpenCV 폴더에 build 폴더와 install 폴더 생성
$ cmake -DCMAKE_BUILD_TYPE=Debug -DCMAKE_INSTALL_PREFIX=../install ../opencv: install 폴더에 debug 모드로 빌드하기 위해 generate$ make -j7: 빌드$ sudo make install
-
module1 만들기(멤버 변수로 cvmat을 넣은 class를 하나 만들어서 opencv를 사용)
- 헤더 파일들 연결
- 라이브러리 링킹
- 빌드까지 확인
4.2. OpenCV를 사용하는 프로그램 하나 빌드
4.3. OpenCV와 Eigen3 라이브러리를 사용하는 프로그램 빌드
-
eigen install
- thirdparty 폴더에 Eigen3 폴더 생성
- Eigen3 폴더에 Eigen3 클론
- Eigen3 폴더에 build 폴더와 install 폴더 생성
$ cmake -DCMAKE_BUILD_TYPE=Debug -DCMAKE_INSTALL_PREFIX=../install ../eigen$ make -j7$ sudo make install
-
module2에 eigen3를 랩핑하는 라이브러리 만들기
4.4. 정리
- 최종 상태
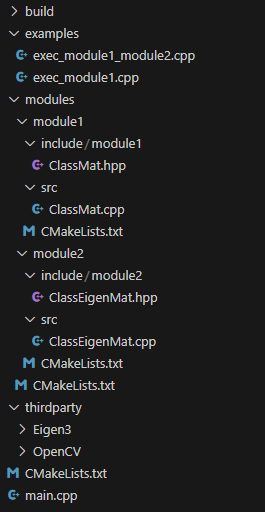
- thirdparty: 직접 빌드한 OpenCV, Eigen3 라이브러리가 있다.
- modules: 분리해둔 module들이 있다.
- 각 module마다 CMakeLists.txt로 필요한 라이브러리들을 가져와서 링크했다.
- module1: OpenCV를 가져왔음
- module2: Eigen3를 가져왔음
- 각 module마다 CMakeLists.txt로 필요한 라이브러리들을 가져와서 링크했다.
- CMakeLists.txt: 빌드한 모듈들을 가져와서 examples 폴더에 있는 main문들에 엮어서 프로그램들을 만들었다.
-
사용한 커맨드
명령어 설명 add_subdirectory하위 디렉토리의 CMakeLists.txt를 읽어들임 add_executable실행 파일을 생성 add_library라이브러리를 생성 find_package서드파티 라이브러리를 로드 target_include_directories(?) 생성되는 파일이나 라이브러리의 헤더 파일을 연결 target_link_libraries타겟 파일 또는 타겟 라이브러리에 라이브러리를 링크 message디버깅 및 로깅에 사용
📙 강의
- 스트라드비젼 Visual SLAM 연구원 장형기
- HolyGround 대표 양은성

JUST DO IT.