캡디_객체 이름을 포함하는 2D 지도 생성 SLAM
1.ROS Message Filter : Approximate Time Callback error
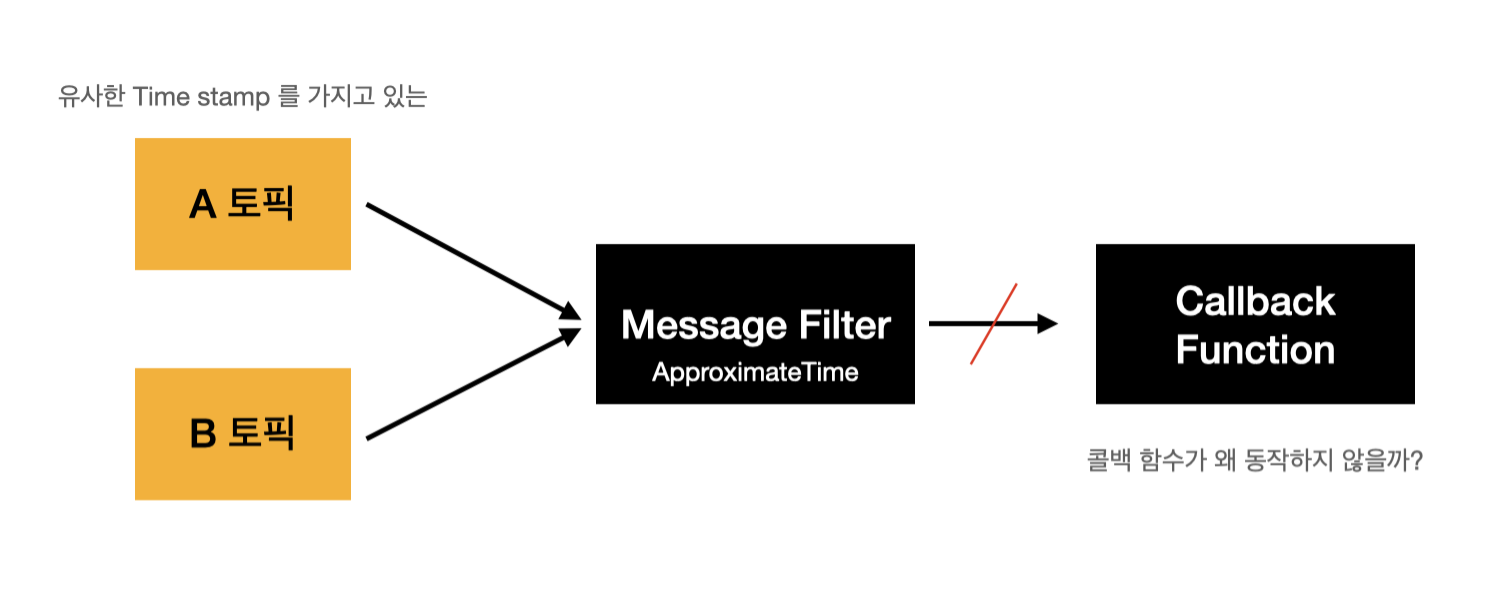
ROS 에서 message filter 의 기능은 서로 다른 주파수로 발행되는 각 토픽들의 Sync 를 맞추는 것입니다. 저의 경우, /image_raw, /camera_info, /scan , /darknet_ros/bounding_boxes 의 4개의 토픽을 받아서
2023년 2월 6일
2.ROS Message filter 메시지 필터

메시지가 메시지 필터에 도달하면 즉시 출력되지 않고 특정 조건이 충족되면 나중에 출력될 수 있습니다. 예를 들어 LiDAR , 카메라 등 여러가지 센서를 사용해 로봇 프로젝트를 수행할 때, 두 개 이상의 메시지 내용을 포함하는 알고리즘을 설계한다고 가정합시다. 두 토픽
2023년 2월 6일
3.ROS message filter: waitForTransform() Lookup error

이전 포스팅:이와 같이 bounding_boxes 토픽의 time stamp 를 수정해 주고 난 후 또 에러를 마주쳤습니다. waitForTransform() 에서 요구하는 데이터는 A 시점의 데이터인데, 가장 최근에 들어오는 데이터는 B 시점의 데이터라는 뜻입니다.
2023년 2월 6일