Project Chrono

uname -m -x86_64 확인
공식 사이트에서 콘다 다운로드
"Python 3.11
64-Bit (x86) Installer (997.2M)"
cd Downloads
bash Anaconda3-2024.02-1-Linux-x86_64.sh
bashrc 추가
source ~/anaconda3/etc/profile.d/conda.sh
conda create -n myenv python=3.9
conda activate myenv
pychrono-9.0.0-py39_4853.tar.bz2
선택
(release: 최신 / main: 안전성)
데모파일 위치
cd anaconda3/envs/chrono/lib/python3.9/site-packages/pychrono
- 실행
Anaconda Promptconda activate chronoDEMO file repository로 이동
cd C:\Users\user\anaconda3\pkgs\pychrono-8.0.0-py39_3631\Lib\site-packages\pychrono\demos
Python codes
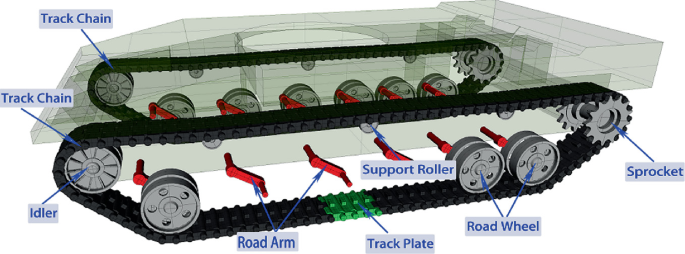
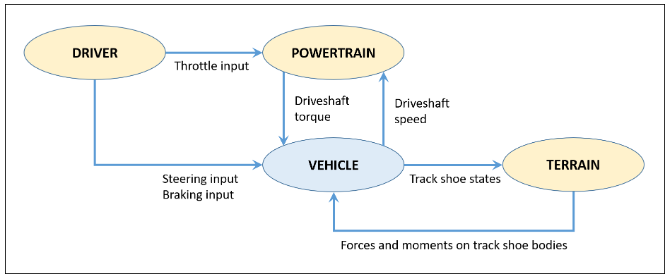
Tracked vehicle inputs & outputs
# Main driver function for the HMMWV full model.
#
# The vehicle reference frame has Z up, X towards the front of the vehicle, and
# Y pointing to the left.
#
# =============================================================================
import pychrono as chrono
import pychrono.vehicle as veh
import pychrono.irrlicht as irr
import os
import math as m
# M113
# print("\n")
# print(dir(veh.M113))
def get_driver_inputs(time):
# Example dynamic inputs based on time
throttle = 1.0
steering = 0.5 * m.sin(time*2)
braking = 0.0
return throttle, steering, braking
# Quaternion to Roll, Pitch, Yaw
def euler_from_quaternion(w, x, y, z):
t0 = +2.0 * (w * x + y * z)
t1 = +1.0 - 2.0 * (x * x + y * y)
roll = m.atan2(t0, t1)*180/m.pi
t2 = +2.0 * (w * y - z * x)
t2 = +1.0 if t2 > +1.0 else t2
t2 = -1.0 if t2 < -1.0 else t2
pitch = m.asin(t2)*180/m.pi
t3 = +2.0 * (w * z + x * y)
t4 = +1.0 - 2.0 * (y * y + z * z)
yaw = m.atan2(t3, t4)*180/m.pi
return roll, pitch, yaw # in degrees
def main():
#print("Copyright (c) 2017 projectchrono.org\nChrono version: ", CHRONO_VERSION , "\n\n")
# Create the M113 vehicle
# ------------------------
m113 = veh.M113()
m113.SetContactMethod(chrono.ChContactMethod_SMC)
m113.SetTrackShoeType(veh.TrackShoeType_SINGLE_PIN)
m113.SetDrivelineType(veh.DrivelineTypeTV_BDS)
m113.SetEngineType(veh.EngineModelType_SHAFTS)
m113.SetTransmissionType(veh.TransmissionModelType_SHAFTS)
m113.SetBrakeType(veh.BrakeType_SIMPLE)
m113.SetInitPosition(chrono.ChCoordsysD(initLoc, initRot))
m113.Initialize()
m113.SetChassisVisualizationType(veh.VisualizationType_PRIMITIVES)
m113.SetSprocketVisualizationType(veh.VisualizationType_MESH);
m113.SetIdlerVisualizationType(veh.VisualizationType_MESH);
m113.SetIdlerWheelVisualizationType(veh.VisualizationType_MESH);
m113.SetSuspensionVisualizationType(veh.VisualizationType_MESH);
m113.SetRoadWheelVisualizationType(veh.VisualizationType_MESH);
m113.SetTrackShoeVisualizationType(veh.VisualizationType_MESH);
# Create the terrain
# ------------------
terrain = veh.RigidTerrain(m113.GetSystem())
if (contact_method == chrono.ChContactMethod_NSC):
patch_mat = chrono.ChMaterialSurfaceNSC()
patch_mat.SetFriction(0.9)
patch_mat.SetRestitution(0.01)
elif (contact_method == chrono.ChContactMethod_SMC):
patch_mat = chrono.ChMaterialSurfaceSMC()
patch_mat.SetFriction(0.9)
patch_mat.SetRestitution(0.01)
patch_mat.SetYoungModulus(2e7)
patch = terrain.AddPatch(patch_mat,
chrono.CSYSNORM,
terrainLength, terrainWidth)
patch.SetTexture(veh.GetDataFile("terrain/textures/tile4.jpg"), 200, 200)
patch.SetColor(chrono.ChColor(0.5, 0.8, 0.5))
terrain.Initialize()
# Create the vehicle Irrlicht interface
# -------------------------------------
vis = veh.ChTrackedVehicleVisualSystemIrrlicht()
vis.SetWindowTitle('M113')
vis.SetWindowSize(1500, 800)
vis.SetChaseCamera(trackPoint, 6.0, 0.5)
vis.Initialize()
vis.AddLogo(chrono.GetChronoDataFile('logo_pychrono_alpha.png'))
vis.AddLightDirectional()
vis.AddSkyBox()
vis.AttachVehicle(m113.GetVehicle())
# Create the driver system
# ------------------------
driver = veh.ChDriver(m113.GetVehicle())
driver.Initialize()
# Inter-module communication data
shoe_forces_left = veh.TerrainForces(m113.GetVehicle().GetNumTrackShoes(veh.LEFT))
shoe_forces_right = veh.TerrainForces(m113.GetVehicle().GetNumTrackShoes(veh.RIGHT))
# Simulation loop
# -------------------------------------------------------------------------------------------
m113.GetVehicle().EnableRealtime(True)
# Number of simulation steps between miscellaneous events
debug_steps = m.ceil(debug_step_size / step_size)
# Initialize simulation frame counter and simulation time
step_number = 0
while vis.Run():
time = m113.GetSystem().GetChTime()
vis.BeginScene()
vis.Render()
vis.EndScene()
# Get driver inputs
throttle, steering, braking = get_driver_inputs(time)
driver.SetThrottle(throttle)
driver.SetSteering(steering)
driver.SetBraking(braking)
driver_inputs = driver.GetInputs()
# Update modules (process inputs from other modules)
driver.Synchronize(time)
terrain.Synchronize(time)
m113.Synchronize(time, driver_inputs, shoe_forces_left, shoe_forces_right)
vis.Synchronize(time, driver_inputs)
# Advance simulation for one timestep for all modules
driver.Advance(step_size)
terrain.Advance(step_size)
m113.Advance(step_size)
vis.Advance(step_size)
# Increment frame number
step_number += 1
# Outputs ***
if (debug_output and step_number % debug_steps == 0) :
print("\n\n============ System Information ============\n")
print( "Time = ", time, "s\n")
#my_hmmwv.DebugLog(OUT_SPRINGS | OUT_SHOCKS | OUT_CONSTRAINTS)
###################################### ChChassis.{} ####################################
# print(dir(my_hmmwv.GetChassis()))
# =============================================================================================
# 'ExportComponentList', 'GetBody', 'GetCOMFrame', 'GetCOMSpeed', 'GetDriverPos',
# 'GetInertia', 'GetLocalDriverCoordsys', 'GetLocalPosRearConnector', 'GetMarkers',
# 'GetMass', 'GetName', 'GetPointAcceleration', 'GetPointLocation', 'GetPointVelocity',
# 'GetPos', 'GetRot', 'GetSpeed', 'GetSystem', 'GetTemplateName', 'GetTransform',
# 'HasBushings', 'Initialize', 'InitializeInertiaProperties', 'IsFixed', 'IsInitialized',
# 'Output', 'OutputEnabled', 'RemoveJoint', 'RemoveVisualizationAssets',
# 'SetAerodynamicDrag', 'SetCollide', 'SetFixed', 'SetName', 'SetOutput',
# 'SetVisualizationType', 'Synchronize', 'TransformInertiaMatrix', 'UpdateInertiaProperties',
# '__class_', '__delattr__', '__dict__', '__dir__', '__doc__', '__eq__', '__format__',
# '__ge__', '__getattribute__', '__gt__', '__hash__', '__init__', '__init_subclass__',
# '__le__', '__lt__', '__module__', '__ne__', '__new__', '__reduce__', '__reduce_ex__',
# '__repr__', '__setattr__', '__sizeof__', '__str__', '__subclasshook__', '__swig_destroy__',
# '__weakref_', 'this', 'thisown']
# =============================================================================================
##################################### ChMarkers.{} ########################################
# print(dir(marker))
# ==============================================================================================
# ['Amatrix', 'ArchiveIn', 'ArchiveOut', 'Compute_Adt', 'Compute_Adtdt', 'ConcatenatePostTransformation', 'ConcatenatePreTransformation',
# 'Dir_Ref2World', 'Dir_World2Ref', 'Equals', 'GetA', 'GetA_dt', 'GetA_dtdt', 'GetAbsCoord', 'GetAbsCoord_dt', 'GetAbsCoord_dtdt', 'GetAbsFrame',
# 'GetAbsWacc', 'GetAbsWvel', 'GetBody', 'GetChTime', 'GetCoord', 'GetCoord_dt', 'GetCoord_dtdt', 'GetIdentifier', 'GetInverse', 'GetMotionType',
# 'GetMotion_X', 'GetMotion_Y', 'GetMotion_Z', 'GetMotion_ang', 'GetMotion_axis', 'GetName', 'GetNameString', 'GetPos', 'GetPos_dt', 'GetPos_dtdt',
# 'GetRest_Coord', 'GetRot', 'GetRotAngle', 'GetRotAxis', 'GetRot_dt', 'GetRot_dtdt', 'GetWacc_loc', 'GetWacc_par', 'GetWvel_loc', 'GetWvel_par',
# 'Impose_Abs_Coord', 'Impose_Rel_Coord', 'Invert', 'MFlagGet', 'MFlagSetOFF', 'MFlagSetON', 'MFlagsSetAllOFF', 'MFlagsSetAllON',
# 'M_MOTION_EXTERNAL', 'M_MOTION_FUNCTIONS', 'M_MOTION_KEYFRAMED', 'Move', 'Normalize', 'PointAccelerationLocalToParent',
# 'PointAccelerationParentToLocal', 'PointSpeedLocalToParent', 'PointSpeedParentToLocal', 'Point_Ref2World', 'Point_World2Ref', 'SetAbsCoord',
# 'SetAbsCoord_dt', 'SetAbsCoord_dtdt', 'SetBody', 'SetChTime', 'SetCoord', 'SetCoord_dt', 'SetCoord_dtdt', 'SetIdentifier', 'SetIdentity', 'SetMotionType',
# 'SetMotion_X', 'SetMotion_Y', 'SetMotion_Z', 'SetMotion_ang', 'SetMotion_axis', 'SetName', 'SetNameString', 'SetPos', 'SetPos_dt', 'SetPos_dtdt', 'SetRot',
# 'SetRot_dt', 'SetRot_dtdt', 'SetWacc_loc', 'SetWacc_par', 'SetWvel_loc', 'SetWvel_par', 'TransformDirectionLocalToParent',
# 'TransformDirectionParentToLocal', 'TransformLocalToParent', 'TransformParentToLocal', 'TransformPointLocalToParent', 'TransformPointParentToLocal',
# 'Update', 'UpdateState', 'UpdateTime', 'UpdatedExternalTime', '__class__', '__delattr__', '__dict__', '__dir__', '__div__', '__doc__', '__eq__', '__format__', '__ge__',
# '__getattribute__', '__gt__', '__hash__', '__imod__', '__imul__', '__init__', '__init_subclass__', '__irshift__', '__le__', '__lt__', '__module__', '__mul__', '__ne__', '__new__',
# '__reduce__', '__reduce_ex__', '__repr__', '__rshift__', '__setattr__', '__sizeof__', '__str__', '__subclasshook__', '__swig_destroy__', '__truediv__', '__weakref__', 'coord',
# 'coord_dt', 'coord_dtdt', 'this', 'thisown']
# ==============================================================================================
chassis = m113.GetChassis()
# [0]: Chassis driver position / [1]: Chassis COM
marker = chassis.GetMarkers()[1]
marker_name = marker.GetName()
marker_location = marker.GetAbsCoord().pos
marker_velocity = chassis.GetPointVelocity(marker_location)
chassis_rotation = chassis.GetRot()
roll, pitch, yaw = euler_from_quaternion(chassis_rotation.e0, chassis_rotation.e1, chassis_rotation.e2, chassis_rotation.e3)
rotate = marker.GetAbsWvel()*180/m.pi
print( "Inputs")
print(" [ Driver Cmd ] throttle:",throttle," braking:",braking, " steering:",steering, "\n")
print( "Outputs")
print( " [",marker_name,"Loc ] x:" , marker_location.x, " y:", marker_location.y, " z:",marker_location.z)
print( " [",marker_name,"Vel ] vx:", marker_velocity.x," vy:",marker_velocity.y," vz:",marker_velocity.z)
# print(" [ Chassis Quaternion Rot ] q0:", chassis_rotation.e0," q1:", chassis_rotation.e1," q2:",chassis_rotation.e2," q3: ",chassis_rotation.e3)
print(" [ Chassis Rot Ang ] rx:",roll," ry:",pitch," rz:",yaw," (degree)")
print(" [ Chassis Rot Vel ] wx:",rotate.x," wy:",rotate.y," wz:",rotate.z," (degree/s)")
return 0
# -------------------------------------------------------------------------------------------------
# Setting Data path
# data_path = chrono.GetChronoDataFile('')
# print("PyChrono data path:", data_path)
veh.SetDataPath(chrono.GetChronoDataPath() + 'vehicle/')
# Initial vehicle location and orientation
initLoc = chrono.ChVectorD(0, 0, 0.7)
initRot = chrono.ChQuaternionD(1, 0, 0, 0)
# Contact method
contact_method = chrono.ChContactMethod_SMC
# Rigid terrain
terrainHeight = 0; # terrain height (FLAT terrain only)
terrainLength = 100.0; # size in X direction
terrainWidth = 100.0; # size in Y direction
# Point on chassis tracked by the camera
trackPoint = chrono.ChVectorD(0.0, 0.0, 0.0)
# Simulation step sizes
step_size = 5e-4;
# Time interval between two render frames (화면에 보이는 step size)
render_step_size = 1.0 / 60; # FPS = 60
# Debug logging
debug_output = True
debug_step_size = 1.0 / 60 # FPS = 1
main()

System_Dynamics_Lab