강의 보고 공부한 것을 정리하는 목적으로 작성된 글이므로 틀린 점이 있을 수 있음에 양해 부탁드립니다. (피드백 환영입니다)
저번에 말하였던 이진 탐색의 한계때문에 이진 탐색 트리를 공부해볼 것이다.
이진 탐색 트리
이진 탐색 트리(Binary Search Tree)는 이진 트리와 같이 최대 두 개의 자식을 가질 수 있고 왼쪽은 무조건 작은 값 오른쪽은 무조건 큰 값으로 분류되는 트리이다.
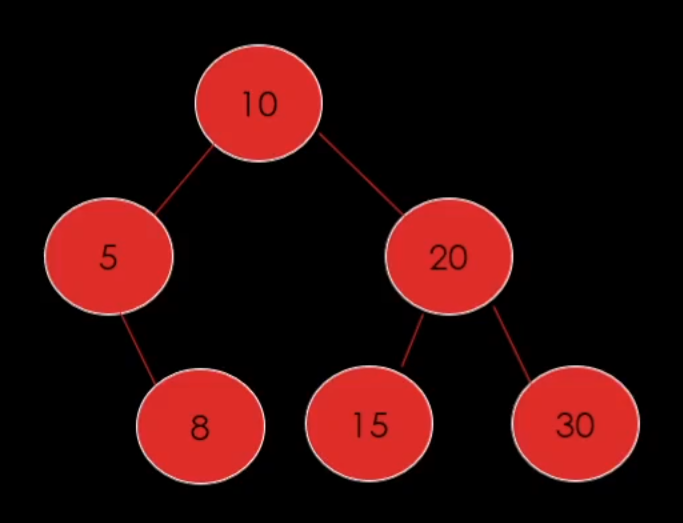
옳은 버전
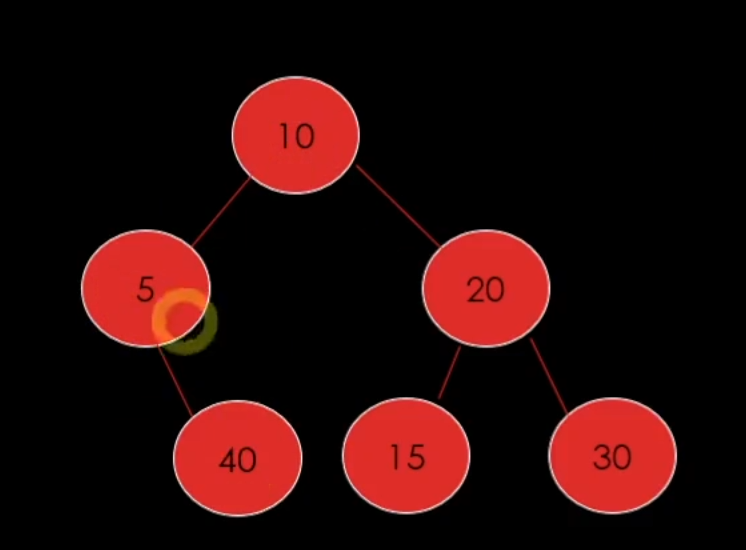
틀린 버전
40은 5보다는 크기만 10보다는 안 작다.
이런 규칙대로 분류를 시킨다.
데이터를 추가 시키는 경우
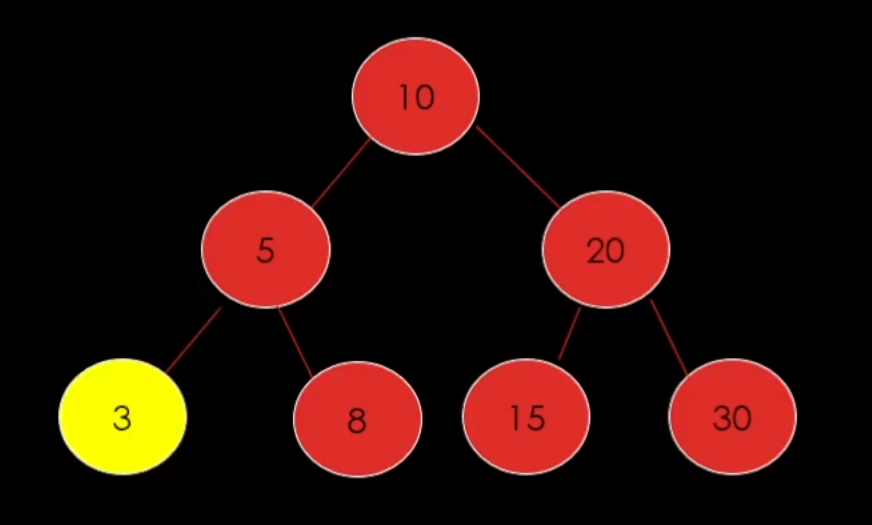
우리가 3이라는 값을 추가시킨다면 우리는 이런식으로 판별해서 값을 넣어줄 수 있을 것이다.
3은 10보다 작다 -> 왼쪽
3은 5보다 작다 -> 왼쪽
더 이상 데이터가 없다 -> 3삽입
데이터를 삭제 시키는 경우
데이터를 추가 시키는 경우보다는 복잡하다.
첫 번째로 삭제할 노드가 자식이 아예 없는 경우이다.
우리가 8을 삭제 해야 된다! 라고 한다면 별로 규칙에 위배되는 것이 없기때문에 그냥 삭제를 해줄 수 있다.
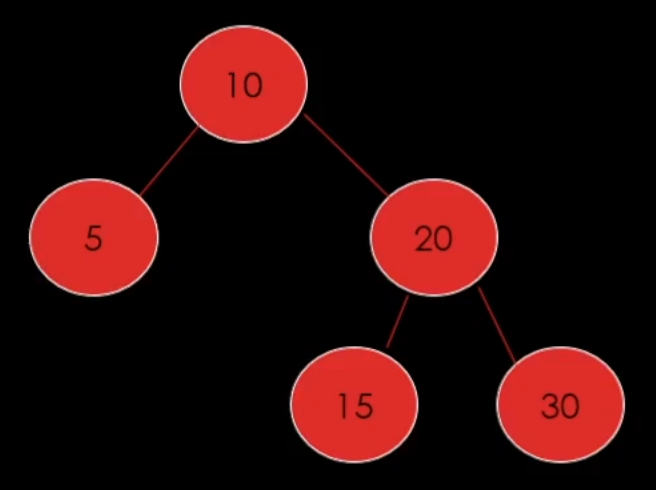
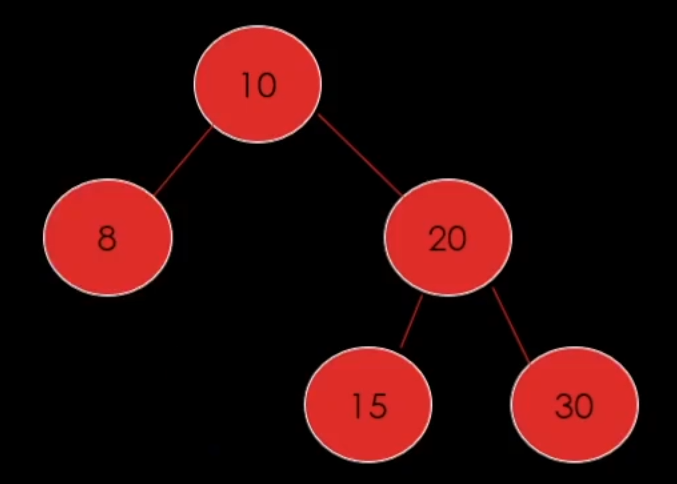
두 번째로 삭제할 노드에 자식이 1개가 있는 경우이다.
우리가 5를 삭제 해야 된다! 라고 한다면 5를 삭제하면 끊어지기 때문에 연결을 해줘야 한다. 그래서 5가 있는 자리에 8을 옮겨주면 된다.
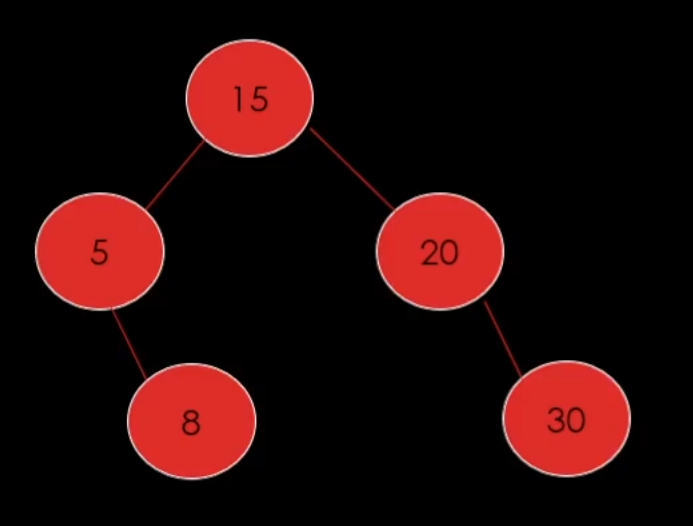
세 번째로 삭제할 노드가 자식이 2개인 경우이다.
우리가 10을 삭제 해야 된다! 라고 한다면 10을 삭제하면 자식을 올려야 하는데 무슨 자식을 올려야하는지 애매해진다.
이럴 때에는 10 다음으로 큰 값을 찾아준다(15). 그러면 15를 10에 자리로 옮겨준다. 그리고 원래 자리에 있던 15를 삭제해준다.
그래서 우리는 이진 탐색 트리를 공부할 때 모든 노드가 자식을 최대 2개까지 가질 수 있고 왼쪽은 무조건 작은 값이 들어가고 오른쪽은 무조건 큰 값이 들어간다는 규칙만 기억하고 있으면 된다.
그래서 우리는 이것을 구현해볼 것이다.
이진 탐색 트리 구현
일단 노드라는 개념이 필요하기 때문에 Node를 구현해줄 것이다.
struct Node
{
Node* parent = nullptr;
Node* left = nullptr;
Node* right = nullptr;
int key = 0;
};그리고 이진 탐색 트리의 토대를 만들어 줄 것이다.
class BinarySearchTree
{
public:
private:
Node* _root = nullptr;
};이런식으로 간단하게 root노드만 가지고 있게 만들어준다.
우리는 먼저 insert함수를 만들어줄 것이다.
void BinarySearchTree::Insert(int key)
{
// 새로운 노드 생성
Node* newNode = new Node();
// key값 넣어주기
newNode->key = key;
// root가 없으면
if (_root = nullptr)
{
_root = newNode;
return;
}
// 추가할 위치를 찾기
// 위치 추적을 위한 node
Node* node = _root;
// 부모님이 누군지
Node* parent = nullptr;
// null을 만날 때 까지
while (node)
{
parent = node;
// left
if (key < node->key)
node = node->left;
// right
else
node = node->right;
}
newNode->parent = parent;
// 어디서 추가가 되었는가?
if (key < parent->key)
parent->left = newNode;
else
parent->right = newNode;
}그리고 이것은 시각적으로 보기 위해서 Print함수를 만들어 줄 것이다.
이것도 출력하는 방식이 다양하지만 우리는 부모를 먼저 출력하고 왼쪽 오른쪽 순서대로 출력을 해볼 것이다.
#include <iostream>
#include <Windows.h>
using namespace std;
// 지정하고 싶은 위치에 출력하기 위함
void SetCursorPosition(int x, int y)
{
HANDLE output = ::GetStdHandle(STD_OUTPUT_HANDLE);
COORD pos = { static_cast<SHORT>(x), static_cast<SHORT>(y) };
::SetConsoleCursorPosition(output, pos);
}
void BinarySearchTree::Print(Node* node, int x, int y)
{
// 예외 처리 null이면 return
if (node == nullptr)
return;
// 커서 조정
SetCursorPosition(x, y);
cout << node->key;
// 뒤에 공식은 예쁘게 출력하기 위함임
Print(node->left, x - (5 / (y + 1)), y + 1);
Print(node->right, x + (5 / (y + 1)), y + 1);
}이런식으로 코드를 짜준다.
그리고 출력을 해본다면
#include "BinarySearchTree.h"
int main()
{
BinarySearchTree bst;
bst.Insert(20);
bst.Insert(30);
bst.Insert(10);
bst.Print();
}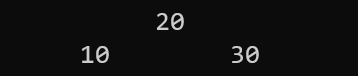
이렇게 출력이 되는 것을 알 수 있다.
그 다음으로는 Search함수를 만들어 줄 것이다.
Node* BinarySearchTree::Search(Node* node, int key)
{
// 못찾으면 nullptr 리턴, 찾으면 찾은 node 리턴
if (node == nullptr || key == node->key)
return node;
// key가 node의 key보다 작으면 왼쪽으로
if (key < node->key)
return Search(node->left, key);
// 아니면 오른쪽으로!
else
return Search(node->right, key);
}이런식으로 구현해주면 된다.
그리고 이제 대망의 삭제하는 부분을 만들었어야 하는데 이론으로도 삭제하는 부분은 좀 번거로운 부분이 있었다.
그래서 헬퍼함수인 Min과 Max와 Next 먼저 만들어 볼 것이다.
여기서 Min과 Max는 만들기 간단하짐나 Next는 조금 힘들 수 있다.
Node* BinarySearchTree::Min(Node* node)
{
if (node == nullptr)
return nullptr;
while (node->left)
node = node->left;
return node;
}
Node* BinarySearchTree::Max(Node* node)
{
if (node == nullptr)
return nullptr;
while (node->right)
node = node->right;
return node;
}
Node* BinarySearchTree::Next(Node* node)
{
if (node->right)
return Min(node->right);
Node* parent = node->parent;
while (parent && node == parent->right)
{
node = parent;
parent = parent->parent;
}
return parent;
}이런식으로 구현해줄 수 있다.
그리고 마지막으로 Replace라는 서브트리를 교체시키는 함수를 만들 것이다.
Replace는 만약에 중간에 값을 삭제해 버렸을 때 이어주는 함수이다.
void BinarySearchTree::Replace(Node* u, Node* v)
{
// u가 root라는 뜻
if (u->parent == nullptr)
_root = v;
// u가 부모의 왼쪽 노드일 때
else if (u == u->parent->left)
u->parent->left = v;
// u가 부모의 오른쪽 노드일 때
else
u->parent->right = v;
// 경우따라 nullptr로 넣을 수 있기에 예외처리
if (v)
v->parent = u->parent;
delete u;
}replace는 대충 이런식으로 돌아가는 함수이다.
그러면 이제 최종적으로 delete를 만들어주면 된다.
void BinarySearchTree::Delete(int key)
{
Node* deleteNode = Search(_root, key);
Delete(deleteNode);
}
void BinarySearchTree::Delete(Node* node)
{
// nullptr 체크
if (node == nullptr)
return ;
// 자식 여부에 따라 처리
// 왼쪽 자식이 없을 때
if (node->left == nullptr)
{
Replace(node, node->right);
}
// 오른쪽 자식이 없을 때
else if (node->right == nullptr)
{
Replace(node, node->left);
}
// 양쪽에 자식이 다 있을 때
else
{
// root 다음으로 큰 수 찾기
Node* next = Next(node);
node->key = next->key;
Delete(next);
}
}이런식으로 위에 규칙과 동일하게 구현을 해주면 된다.
자 그러면 한 번 만든 것들을 사용해 본다면
int main()
{
BinarySearchTree bst;
bst.Insert(20);
bst.Insert(30);
bst.Insert(10);
bst.Insert(25);
bst.Insert(26);
bst.Insert(40);
bst.Insert(50);
bst.Print();
}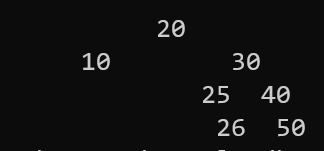
이런식으로 출력이 되고
Delete를 써본다면
int main()
{
BinarySearchTree bst;
bst.Insert(20);
bst.Insert(30);
bst.Insert(10);
bst.Insert(25);
bst.Insert(26);
bst.Insert(40);
bst.Insert(50);
bst.Delete(26);
bst.Print();
}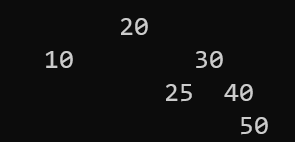
이런식으로 잘 지워지는 것을 알 수 있다.
우리는 이 세부적인 코드를 전부 이해하는 것이 아니라
이진 탐색 트리가 무엇인가?에 대한 핵심 내용만 알고 있으면 된다.
이진 탐색이 vector기반이여서 중간 삽입/삭제가 어려움
-> 중간 삽입/삭제가 용이한 트리로 만들어 버림
음 그러면 이진 탐색 트리으로 만족하면 될까?
이진 탐색 -> O(logN) -> 데이터 추가/삭제 어려움..
이진 탐색 트리 -> O(logN) -> 무언가 부족함
이진 탐색 트리가 부족한 것은 균형이다..
균형이 잘 맞으면 O(logN)이지만..
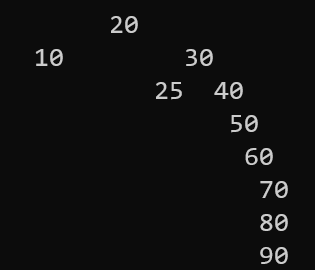
이런식으로 한쪽으로 값을 쭉 넣어서 쏠리게 된다면 솔직히 연결 리스트랑 다를께 없게 되어서 O(N)이 되어 버린다.
그래서 우리는 이것을 개선하기 위해서 균형을 맞춰줘서 한 쪽으로 쏠리지 않게만 만들어주면 되는데 그것이 Red-Black-Tree이고 그것을 구현한 표준 방식이 map이다.
그래서 다음시간에는 Red-Black-Tree을 배울 것이다!
마무리
일단 다음에 Red-Black-Tree를 배우기 전에 왜 Red-Black-Tree까지 갔어야 하는지 기억을 해야한다.
이진 탐색은 빠르지만 데이터 추가/삭제가 어렵다.
그래서 데이터 추가/삭제가 편한 트리 구조로 이진 탐색 트리를 만들었다.
하지만 이진 탐색 트리는 균형이 맞지 않는다면 연결리스트과 다를빠가 없게 되어서 느려진다.
그래서 우리가 Red-Black-Tree를 배우는 것이다.
✅기억하자!