
SIFT 상세
- SIFT 단계
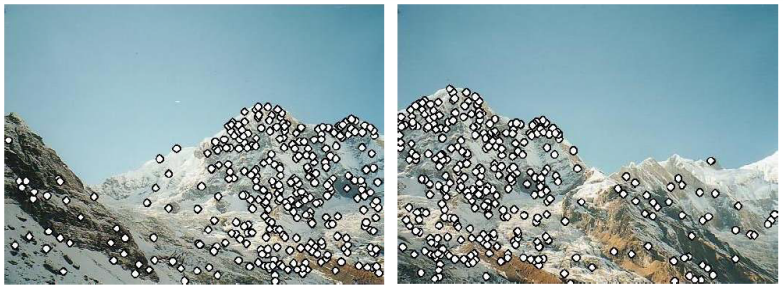
- 각각의 영상에서 특징점 찾기
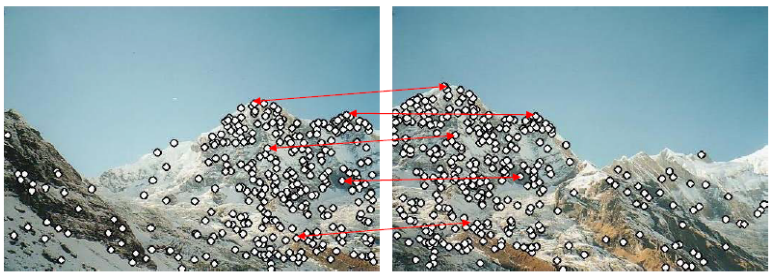
- 특짐정 매칭
- 매칭된 점을 통해 영상의 차이를 계산해 align
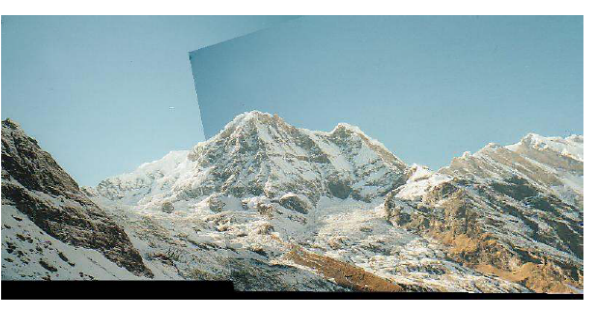
- 그 후 명도를 맞춰주는 과정을 실행해줌
- 특징점은 다른 영상과의 분리되어 독립적으로 찾아야함
- 그 후 특징을 잘 표현하는 기술자를 사용해 매칭
사용 분야
요구사항
- Illumination
- Scale
- Rotation
- Affine
- 밑의 2개는 헤리스 코너에서도 만족, 위의 2개까지도 만족해야 함 -> SIFT
SIFT의 4단계
- keypoints 검출
- 키포인트를 중심으로 그레디언트의 방향을 분석 -> dominant orientation
- 위의 정보들을 기술자(descriptor)로 정리
- 기술자를 사용해 여러 영상에서 특징점을 매칭
키포인트 검출
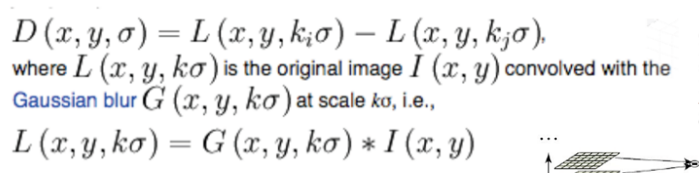
- DOG에서의 local maxima/minima 찾기
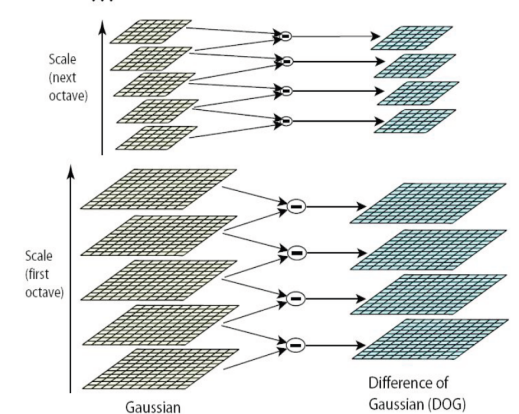
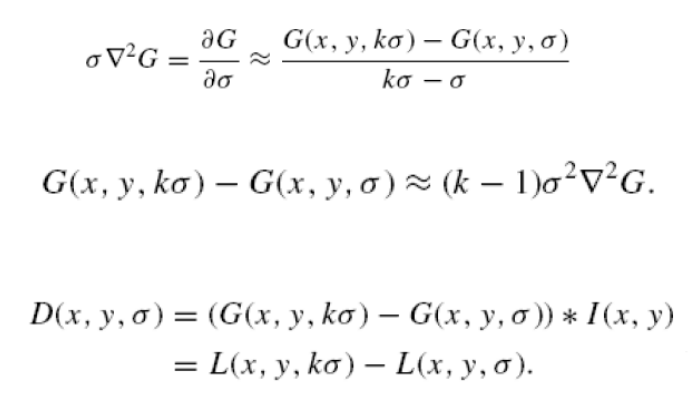
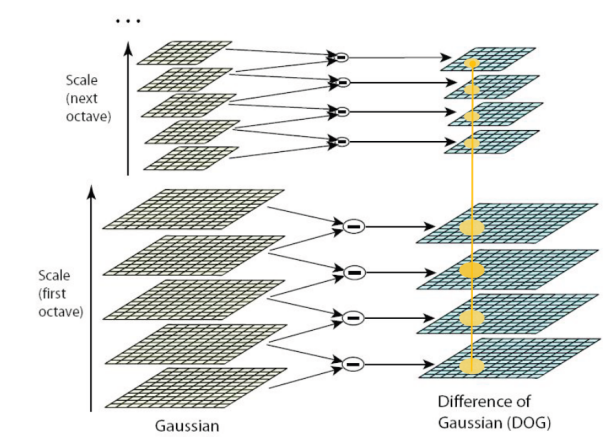
- 여러개의 스케일 영상에서 시그마 값을 다르게 설정한 여러개의 가우시안 필터를 적용한 영상을 만들고 이들의 차이점으로 만든 영상이 DOG영상
- DOG에서의 주변 영역을 통해 극점(maxima/minima)를 찾음
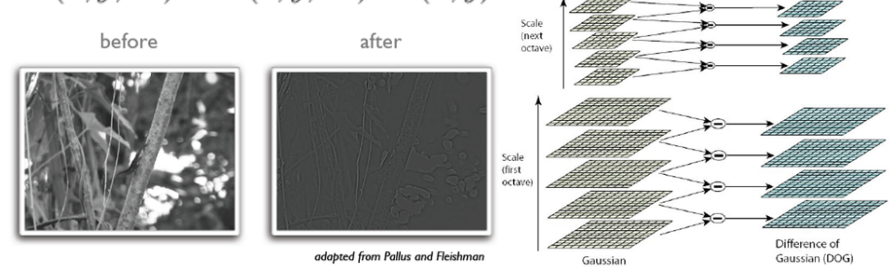
- 2차 미분한 영상에서 영교차되는 지점이 명암차이가 많은 지점이었음(코너)
- 각각의 피라미드 영상에서 다른 시그마로 가우시안 필터를 적용해야함 이는 오랜 시간이 걸림
- 라플라시안 필터를 사용하면 빠르게 가능
- 시그마의 차이로 라플라시안필터를 적용해 빼면 빠르게 가능
키포인트 검출
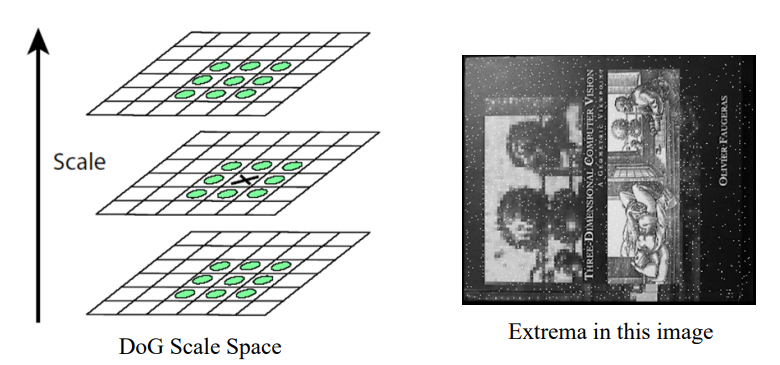
- DOG영상이 5개일때 1,2,3번을 겹쳐 2번 DOG의 키포인트를 검출할 수 있음
- 2번의 가운데 X값이 해당 DOG의 주변 8개와 주변 DOG(1,3번)의 주변 9개씩 18 총 26개중 최소, 최대일때 X지점을 키포인트라고 한다
스케일에 따른 키 포인트
- 다른 스케일의 같은 지점에서 동일하게 키포인트가 검출되어야 스케일의 변화에도 유지되는 키포인트후보 영역
- 후보 영역인 이유는 조명에 따라 다른 스케일에서 많은 키포인트가 검출될 수 있음
- 명암값이 작은곳은 키포인트 값을 제거함
- 라플라시안 필터를 적용하는 과정에서 엣지도 키포인트로 검출 될 수 있음 -> 엣지에 해당하는 키포인트도 제거



dominant orientation검출
- 각각의 키포인트에 기술자를 부여하기 위해
- 그레디언트를 사용(magnitude(크기) and orientation(방향))
- 키포인트를 기준으로 64개의 픽셀에서 각각의 그레디언트(orientation)를 구함
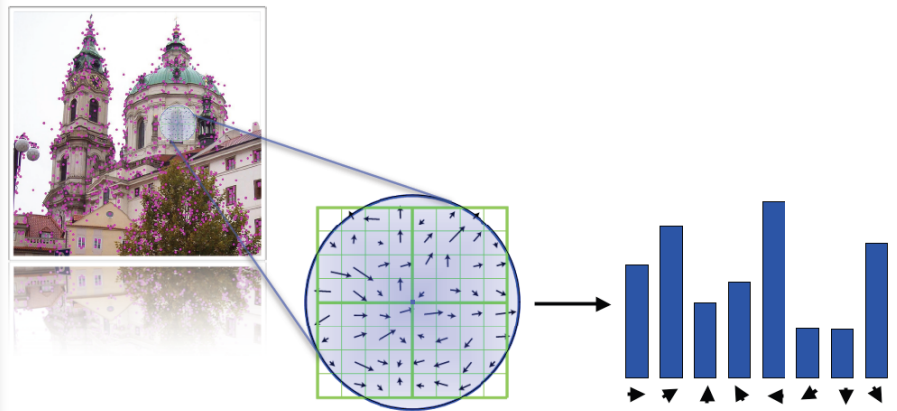
- 아크탄젠트를 8개의 방향으로 나누어서 히스토그램 작성
- 키포인트의 주변 64개의 픽셀에서 8개의 방향중 어느 방향이 가장 많은지 분석 -> 이 히스토그램이 키포인트의 기술자로 사용됨
- 픽셀을 16x16개로 확장하고 이것을 4x4블럭 16개로 나누고 4x4블럭 각각마다 8개의 방향의 히스토그램으로 작성하는 것이 일반적인 SIFT알고리즘의 기술자
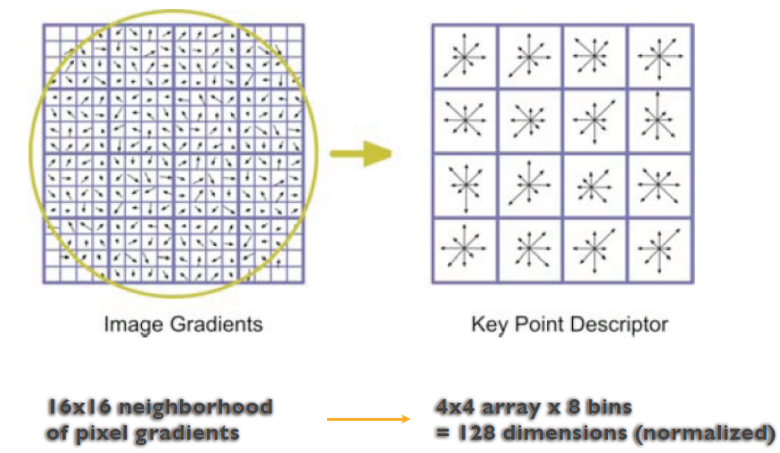
- 각 블럭마다 8방향의 히스토그램이 있음
- 8x16 = 128차원
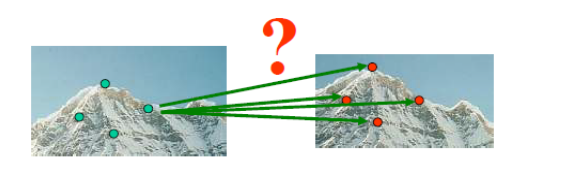
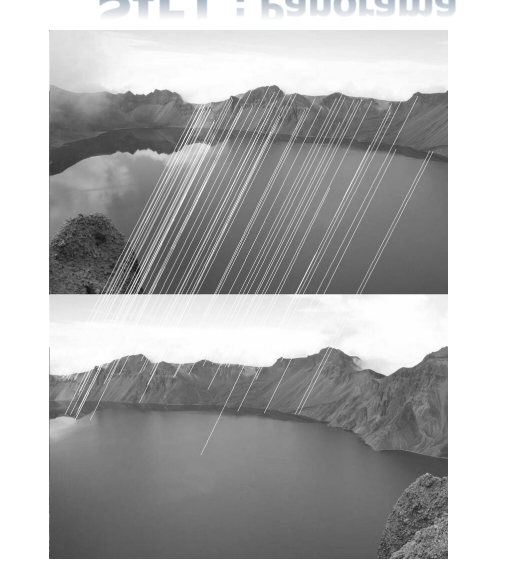
- 두개의 영상에서 키포인트간 128개의 값을 비교해서 차이가 가장 작은 키포인트끼리 매칭하는것

사용 예시
-
간판 인식
-
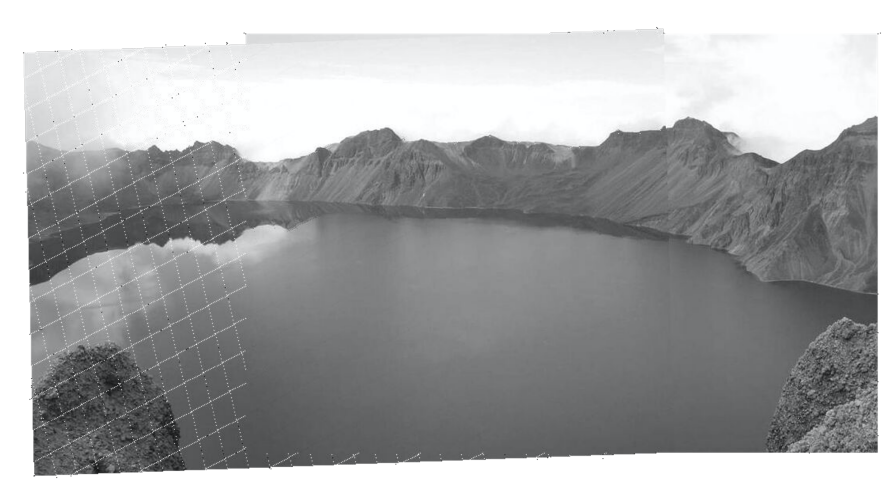
파노라마
-
파노라마2
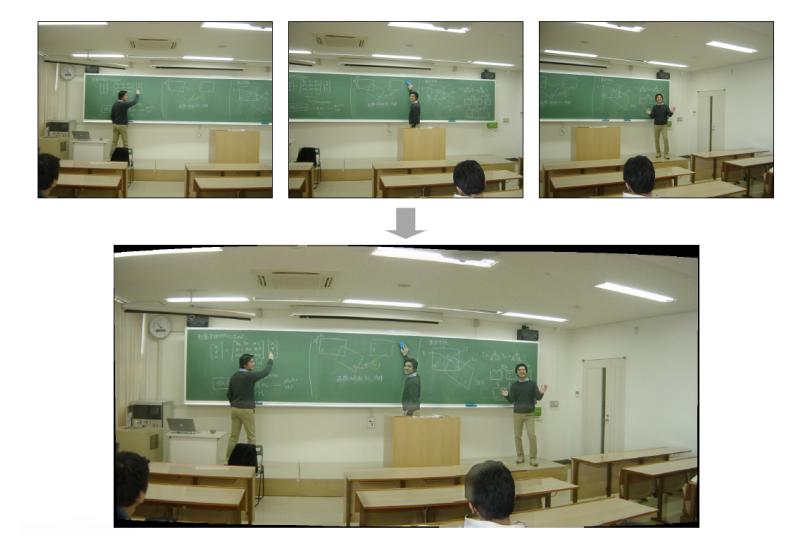
- 카메라를 고정하고 사람이 이동해 동일한 사람이 여러명 나오는 것처럼 보이게 함



KMU SW