자동채색
자동 채색이란 딥러닝을 이용해 자동으로 그림을 채색하는 것을 말한다.
특히 일러스트의 자동 채색이 일러스트레이터와 디자이너의 업계에서 큰 화제가 되고 있다.
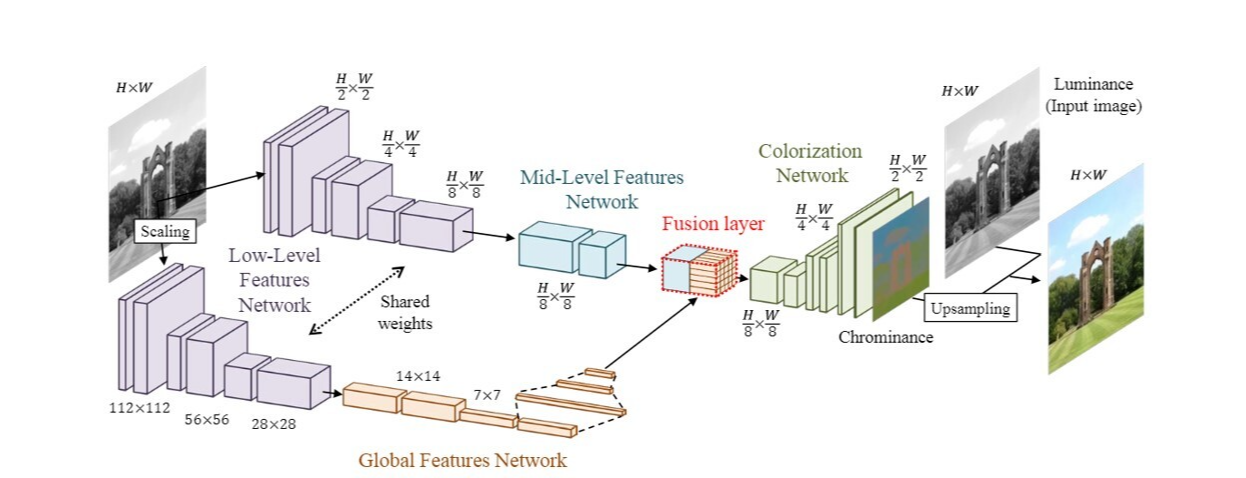
자동 채색을 위한 구조
이미지를 RGB 대신 LAB로 변환하고 , L값을 입력으로 AB값을 출력하는 모델이다.
여기서 RGB 대신 LAB 이미지를 사용하는 이유는 LAB가 자동 채색에 더 적합하기 때문이다.
일반적으로 RGB는 3가지 색을 섞어서 표현하는 이미지 형식이다. (이미지 너비 이미지 높이 채널수)
LAB는 인간의 시각에 가까운 형태로 설계되어 L이 밝기를 나타내고, A와 B는 색을 나타낸다. 즉 흑백 사진에서는 밝기를 기록하고 있기 때문에 밝기 정보로부터 색을 재현 할 수 있다면 자동 채색을 할 수 있게 된다.
자동 채색을 실행하는 구조에서는 밝기를 표현하는 L(그레이스케일)을 입력하고, 색을 나타내는 AB를 출력하는 모델을 구성하고, 입력 데이터 L과 예측데이터 AB를 결합해서 이미지를 출력하는 구조이다.
기본 설치 패키지

import glob
import matplotlib.pyplot as plt
from PIL import Image
# 데이터셋에 포함된 파일명을 불러옴
imgs = glob.glob("Images/*.jpg")
# 이미지 9개를 표기
for i in range(9):
img = Image.open(imgs[i])
plt.subplot(3, 3, i+1)
plt.imshow(img)
plt.show()
import cv2
import numpy as np
from torch.utils.data.dataset import Dataset
# RGB를 LAB으로 변환
def rgb2lab(rgb):
return cv2.cvtColor(rgb,cv2.COLOR_RGB2LAB)
# LAB을 RGB로 변환합니다.
def lab2rgb(lab):
return cv2.cvtColor(lab,cv2.COLOR_LAB2RGB)
class AutoColoring(Dataset):
def __init__(self): # 데이터셋의 초기화 함수
self.data = glob.glob("Images/*.jpg")
def __len__(self): # 사용 가능한 데이터의 개수를 반환하는 함수
return len(self.data)
def __getitem__(self, i): # 데이터를 호출하는 함수
# RGB 이미지를 불러옴
rgb = np.array(Image.open(self.data[1]).resize((256,256)))
# LAB로 변환
lab = rgb2lab(rgb)
# 파이토치는 채널이 가장 안에 와야 하므로 transpose
lab = lab.transpose((2,0,1)).astype(np.float32)
return lab[0], lab[1:]
import torch
import torch.nn as nn
class LowLevel(nn.Module):
def __init__(self):
# 로 레벨 특징 추출기를 구성하는 층의 정의
super(LowLevel, self).__init__()
self.low1 = nn.Conv2d(1,64,kernel_size=3, stride=2, padding=1)
self.lb1 = nn.BatchNorm2d(64)
self.low2 = nn.Conv2d(64,128,kernel_size=3, stride=1, padding=1)
self.lb2 = nn.BatchNorm2d(128)
self.low3 = nn.Conv2d(128,128,kernel_size=3, stride=2, padding=1)
self.lb3 = nn.BatchNorm2d(128)
self.low4 = nn.Conv2d(128,256,kernel_size=3, stride=1, padding=1)
self.lb4 = nn.BatchNorm2d(256)
self.low5 = nn.Conv2d(256,256,kernel_size=3, stride=2, padding=1)
self.lb5 = nn.BatchNorm2d(256)
self.low6 = nn.Conv2d(256,512,kernel_size=3, stride=1, padding=1)
self.lb6 = nn.BatchNorm2d(512)
self.sigmoid = nn.Sigmoid()
def forward(self, x):
# 기본 블럭 구성
low = self.low1(x) # 합성곱
low = self.lb1(low) # 배치 정규화
low = self.sigmoid(low) # 시그모이드
low = self.low2(low)
low = self.lb2(low)
low = self.sigmoid(low)
low = self.low3(low)
low = self.lb3(low)
low = self.sigmoid(low)
low = self.low4(low)
low = self.lb4(low)
low = self.sigmoid(low)
low = self.low5(low)
low = self.lb5(low)
low = self.sigmoid(low)
low = self.low6(low)
low = self.lb6(low)
low = self.sigmoid(low)
return low
class MidLevel(nn.Module):
def __init__(self):
# 미들 레벨 특징 추출기를 구성하는 층의 정의
super(MidLevel, self).__init__()
self.mid1 = nn.Conv2d(512,512,kernel_size=3,stride=1,padding=1)
self.mb1 = nn.BatchNorm2d(512)
self.mid2 = nn.Conv2d(512,256,kernel_size=3,stride=1,padding=1)
self.mb2 = nn.BatchNorm2d(256)
self.sigmoid = nn.Sigmoid()
def forward(self, x):
# 미드 레벨 특징 추출기의 기본 블록
mid = self.mid1(x) # 합성곱
mid = self.mb1(mid) # 배치 정규화
mid = self.sigmoid(mid) # 시그모이드
mid = self.mid2(mid)
mid = self.mb2(mid)
mid = self.sigmoid(mid)
return mid
class GlobalLevel(nn.Module):
def __init__(self):
super(GlobalLevel, self).__init__()
self.glob1 = nn.Conv2d(512,512, kernel_size=3, stride=2, padding=1)
self.gb1 = nn.BatchNorm2d(512)
self.glob2 = nn.Conv2d(512,512,kernel_size=3, stride=1, padding=1)
self.gb2 = nn.BatchNorm2d(512)
self.glob3 = nn.Conv2d(512,512, kernel_size=3, stride=2, padding=1)
self.gb3 = nn.BatchNorm2d(512)
self.glob4 = nn.Conv2d(512,512,kernel_size=3, stride=1, padding=1)
self.gb4 = nn.BatchNorm2d(512)
# 글로벌 레벨 특징 추출기의 MLP층 구성
# 여기서는 분류기호 사용되는 것이 아닌.
# 색을 칠하기 위해 사용하는 특징으로 사용
self.fc1 = nn.Linear(in_features=32768, out_features=1024)
self.fc2 = nn.Linear(in_features=1024, out_features=512)
self.fc3 = nn.Linear(in_features=512, out_features=256)
self.sigmoid = nn.Sigmoid()
def forward(self, x):
# 글로벌 레벨 특징 추출기의 기본 블록
glo = self.glob1(x) #합성곱
glo = self.gb1(glo) # 배치 정규화
glo = self.sigmoid(glo) # 활성화
glo = self.glob2(glo)
glo = self.gb2(glo)
glo = self.sigmoid(glo)
glo = self.glob3(glo)
glo = self.gb3(glo)
glo = self.sigmoid(glo)
glo = self.glob4(glo)
glo = self.gb4(glo)
glo = self.sigmoid(glo)
# 추출된 특징을 1차원으로 펼처준다
glo = torch.flatten(glo, start_dim=1)
glo = self.fc1(glo)
glo = self.sigmoid(glo)
glo = self.fc2(glo)
glo = self.sigmoid(glo)
glo = self.fc3(glo)
glo = self.sigmoid(glo)
return glo
class Colorization(nn.Module):
def __init__(self):
super(Colorization, self).__init__()
# Colorization 네트워크 구성에 필요한 층의 정의
# 업 샘플링 커널:3 스트라이드:1 패딩:1
self.color1 = nn.ConvTranspose2d(256,128, 3,1,1)
self.cb1 = nn.BatchNorm2d(128)
#업 샘플링 커널:2 스트라이드:2 패딩:0
self.color2 = nn.ConvTranspose2d(128,64,2,2)
self.cb2 = nn.BatchNorm2d(64)
self.color3 = nn.ConvTranspose2d(64,64,3,1,1)
self.cb3 = nn.BatchNorm2d(64)
self.color4 = nn.ConvTranspose2d(64,32,2,2)
self.cb4 = nn.BatchNorm2d(32)
self.color5 = nn.ConvTranspose2d(32,2,2,2)
self.sigmoid = nn.Sigmoid()
def forward(self, x):
color = self.color1(x)
color = self.cb1(color)
color = self.sigmoid(color)
color = self.color2(color)
color = self.cb2(color)
color = self.sigmoid(color)
color = self.color3(color)
color = self.cb3(color)
color = self.sigmoid(color)
color = self.color4(color)
color = self.cb4(color)
color = self.sigmoid(color)
color = self.color5(color)
return color
class AutoColoringModel(nn.Module):
def __init__(self):
super(AutoColoringModel, self).__init__()
# 로 레벨 특징 추출기
self.low = LowLevel()
# 미들 레벨 특징 추출기
self.mid = MidLevel()
# 글로벌 레벨 특징 추출기
self.glob = GlobalLevel()
# 특징 합치기
self.fusion = nn.Conv2d(512,256,kernel_size=3,stride=1,padding=1)
# 색 입히기
self.color = Colorization()
# 활성화 함수
self.sigmoid = nn.Sigmoid()
def forward(self, x):
# 레벨 특징 추출기로 입력
low = self.low(x)
# 로 레벨 특징 추출기의 출력을 넣어줌
mid = self.mid(low)
glo = self.glob(low)
# 글로벌 레벨 특징 추출기의 출력을 미들 레벨 특징 추출기의
# 출력 크기가 되도록 반복
fusion = glo.repeat(1,mid.shape[2] * mid.shape[2])
fusion = torch.reshape(
fusion, (-1,256,mid.shape[2], mid.shape[2]))
# 글로벌 레벨 특징 추출기의 특징과 미들 레벨 특징 추출기의 특징을 결합
fusion = torch.cat([mid, fusion], dim=1)
fusion = self.fusion(fusion)
fusion = self.sigmoid(fusion)
# 컬러라이제이션 네트워크
color = self.color(fusion)
return color
import tqdm
from torch.utils.data.dataloader import DataLoader
from torch.optim.adam import Adam
device = "cuda" if torch.cuda.is_available() else "cpu"
# 모델 정의
model = AutoColoringModel().to(device)
# 데이터 정의
dataset = AutoColoring()
loader = DataLoader(dataset, batch_size=32, shuffle=True)
optim = Adam(params=model.parameters(), lr=0.01)
# # 학습 루프 정의
# for epoch in range(200):
# iterator = tqdm.tqdm(loader)
# for L, AB in iterator:
# # L 채널은 흑백 이미지 이므로 채널 차원을 확보해야 함
# L = torch.unsqueeze(L, dim=1).to(device)
# optim.zero_grad()
#
# # A, B 채널을 예측
# pred = model(L)
#
# # 손실 계산과 오차 역전파
# loss = nn.MSELoss()(pred, AB.to(device))
# loss.backward()
# optim.step()
#
# iterator.set_description(f"epoch: {epoch} loss :{loss.item()}")
#
#
#
# # 모델 가중치 저장
# torch.save(model.state_dict(), "AutoColor.pth")
# 결과 비교를 위한 실제 이미지
# pyplot의 이미지 형식에 맞추기 위한 약간의 변형이 필요함
test_L, test_AB = dataset[1]
test_L = np.expand_dims(test_L, axis=0)
real_img = np.concatenate([test_L, test_AB])
real_img = real_img.transpose(1,2,0).astype(np.uint8)
real_img = lab2rgb(real_img)
# 모델이 예측한 결과
with torch.no_grad():
# 모델 가중치 불러오기
model.load_state_dict(
torch.load("AutoColor.pth", map_location=device))
# 모델의 예측값 계산
input_tensor = torch.tensor(test_L)
input_tensor = torch.unsqueeze(input_tensor, dim=0).to(device)
pred_AB = model(input_tensor)
# pyplot의 이미지 형식에 맞추기 위한 약간의 변형이 필요함
pred_LAB = torch.cat([input_tensor, pred_AB], dim=1)
pred_LAB = torch.squeeze(pred_LAB)
pred_LAB = pred_LAB.permute(1,2,0).cpu().numpy()
pred_LAB = lab2rgb(pred_LAB.astype(np.uint8))
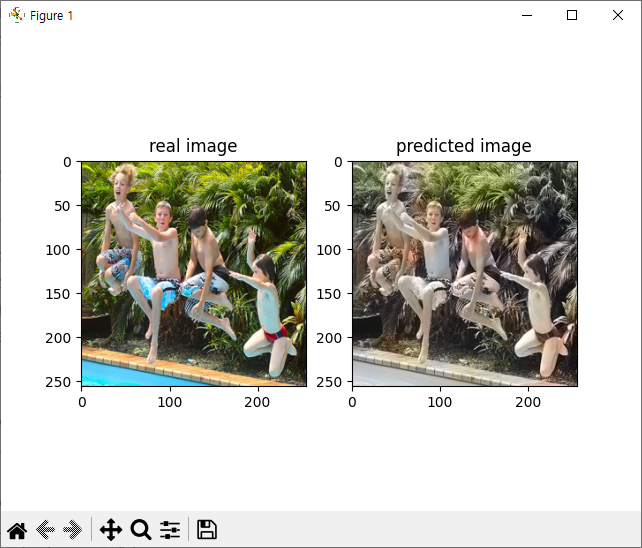
# 실제와 예측값의 비교
plt.subplot(1,2,1)
plt.imshow(real_img)
plt.title("real image")
plt.subplot(1,2,2)
plt.imshow(pred_LAB)
plt.title("predicted image")
plt.show()
4시간 정도 학습 해서 나온 이미지

+AI to AI+