학습을 위해 사용하기 좋은 사이트
사용해볼 학습 예제 Frozen Lake
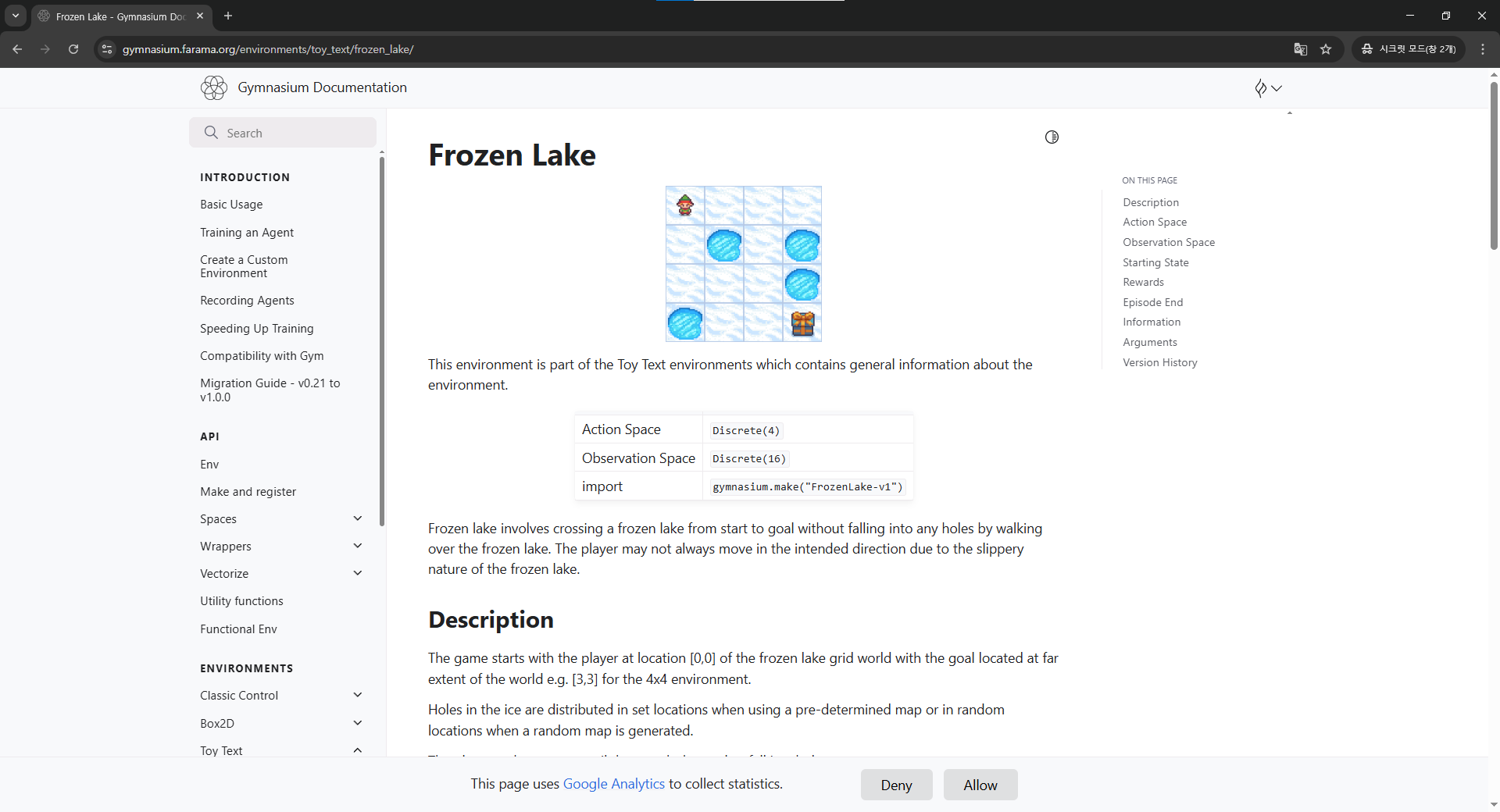
command prompt 창 열고 해당 명령어 입력 0.29.1버전 설치

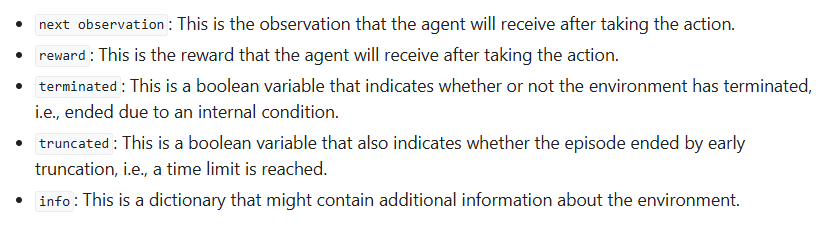
env.step(action) 에 해당하는 값들
gym 예제
import gymnasium as gym
import numpy as np
env = gym.make('FrozenLake-v1')
print(env)
'''
<TimeLimit<OrderEnforcing<PassiveEnvChecker<FrozenLakeEnv<FrozenLake-v1>>>>>
'''
print('state_size: ', env.observation_space.n)
'''
state_size: 16
'''
print('action_size:', env.action_space.n)
'''
action_size: 4
'''
print('start point:', env.reset()[0])
'''
start point: 0
'''
Q_table = np.zeros([env.observation_space.n, env.action_space.n]) # 16 * 4
print(Q_table)
'''
[[0. 0. 0. 0.]
[0. 0. 0. 0.]
[0. 0. 0. 0.]
[0. 0. 0. 0.]
[0. 0. 0. 0.]
[0. 0. 0. 0.]
[0. 0. 0. 0.]
[0. 0. 0. 0.]
[0. 0. 0. 0.]
[0. 0. 0. 0.]
[0. 0. 0. 0.]
[0. 0. 0. 0.]
[0. 0. 0. 0.]
[0. 0. 0. 0.]
[0. 0. 0. 0.]
[0. 0. 0. 0.]]
'''
print(Q_table.shape)
'''
(16, 4)
'''
print()
lr = 0.8
df = 0.95
episodes = 2000
rlist = []
for i in range(episodes):
current_state = env.reset()
rewardALL = 0
j = 0
while j < 99:
j += 1
action = np.argmax(Q_table[current_state[0], :] + np.random.randn(1, env.action_space.n)*(1./(i+1)))
next_state, reward, terminated, truncated, info = env.step(action)
done = terminated | truncated
Q_table[current_state[0], action] = Q_table[current_state[0], action] + \
lr * (reward + df * np.max(Q_table[next_state, :])- Q_table[current_state[0], action])
rewardALL += reward
current_state = [next_state]
if done:
break
rlist.append(rewardALL)
print(rlist)
'''
[0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.0, 0.0, 1.0, 1.0, 1.0, 0.0, 1.0, 0.0, 1.0, 1.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.0, 1.0, 1.0, 0.0, 0.0, 1.0, 1.0, 1.0, 1.0, 1.0, 0.0, 1.0, 1.0, 1.0, 1.0, 1.0, 0.0, 0.0, 0.0, 0.0, 1.0, 0.0, 1.0, 0.0, 1.0, 1.0, 0.0, 1.0, 1.0, 1.0, 0.0, 1.0, 0.0, 1.0, 0.0, 1.0, 1.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.0, 1.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0, 1.0, 1.0, 0.0, 0.0, 1.0, 0.0, 1.0, 1.0, 1.0, 1.0, 1.0, 0.0, 1.0, 1.0, 0.0, 1.0, 0.0, 0.0, 1.0, 0.0, 1.0, 0.0, 1.0, 0.0, 1.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 0.0, 1.0, 1.0, 1.0, 0.0, 0.0, 1.0, 0.0, 0.0, 1.0, 1.0, 1.0, 0.0, 0.0, 0.0, 0.0, 1.0, 0.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 0.0, 1.0, 1.0, 0.0, 1.0, 1.0, 1.0, 0.0, 1.0, 0.0, 1.0, 0.0, 1.0, 1.0, 1.0, 0.0, 1.0, 0.0, 1.0, 0.0, 1.0, 1.0, 1.0, 1.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.0, 0.0, 1.0, 0.0, 1.0, 1.0, 0.0, 0.0, 0.0, 1.0, 1.0, 1.0, 1.0, 0.0, 1.0, 1.0, 1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 1.0, 1.0, 1.0, 1.0, 0.0, 1.0, 1.0, 1.0, 0.0, 1.0, 1.0, 0.0, 1.0, 1.0, 1.0, 0.0, 0.0, 1.0, 1.0, 0.0, 0.0, 1.0, 0.0, 1.0, 1.0, 1.0, 1.0, 1.0, 0.0, 1.0, 0.0, 1.0, 1.0, 1.0, 0.0, 0.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 0.0, 1.0, 0.0, 1.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.0, 1.0, 1.0, 1.0, 0.0, 0.0, 1.0, 0.0, 1.0, 1.0, 1.0, 0.0, 0.0, 1.0, 0.0, 1.0, 1.0, 1.0, 1.0, 0.0, 0.0, 1.0, 1.0, 0.0, 1.0, 1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 1.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.0, 1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 1.0, 1.0, 0.0, 1.0, 1.0, 1.0, 1.0, 0.0, 0.0, 1.0, 1.0, 0.0, 0.0, 0.0, 1.0, 1.0, 0.0, 1.0, 1.0, 0.0, 1.0, 1.0, 0.0, 1.0, 1.0, 0.0, 0.0, 0.0, 1.0, 1.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.0, 1.0, 1.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.0, 1.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.0, 1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 1.0, 1.0, 0.0, 1.0, 1.0, 1.0, 1.0, 1.0, 0.0, 0.0, 1.0, 0.0, 1.0, 1.0, 0.0, 0.0, 1.0, 0.0, 1.0, 1.0, 1.0, 1.0, 1.0, 0.0, 0.0, 1.0, 1.0, 1.0, 1.0, 0.0, 1.0, 0.0, 1.0, 0.0, 0.0, 1.0, 1.0, 1.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 0.0, 1.0, 1.0, 0.0, 0.0, 1.0, 1.0, 0.0, 0.0, 1.0, 1.0, 1.0, 1.0, 1.0, 0.0, 1.0, 1.0, 1.0, 1.0, 0.0, 0.0, 1.0, 1.0, 0.0, 1.0, 1.0, 0.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 0.0, 0.0, 1.0, 1.0, 1.0, 1.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0, 1.0, 0.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 0.0, 0.0, 1.0, 1.0, 0.0, 1.0, 0.0, 0.0, 0.0, 0.0, 1.0, 1.0, 1.0, 0.0, 0.0, 1.0, 0.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 0.0, 0.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 0.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 1.0, 1.0, 0.0, 0.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0, 1.0, 1.0, 0.0, 1.0, 0.0, 1.0, 1.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0, 1.0, 0.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 0.0, 0.0, 0.0, 1.0, 1.0, 1.0, 0.0, 0.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 0.0, 0.0, 1.0, 1.0, 0.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 1.0, 1.0, 1.0, 1.0, 0.0, 1.0, 0.0, 1.0, 1.0, 0.0, 0.0, 1.0, 0.0, 1.0, 0.0, 1.0, 1.0, 1.0, 0.0, 1.0, 1.0, 0.0, 1.0, 1.0, 1.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0, 1.0, 1.0, 1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 1.0, 1.0, 1.0, 0.0, 1.0, 1.0, 0.0, 0.0, 1.0, 0.0, 1.0, 1.0, 0.0, 0.0, 1.0, 0.0, 0.0, 1.0, 1.0, 0.0, 1.0, 1.0, 1.0, 1.0, 0.0, 1.0, 1.0, 1.0, 0.0, 0.0, 1.0, 1.0, 1.0, 0.0, 1.0, 1.0, 0.0, 0.0, 1.0, 1.0, 1.0, 1.0, 1.0, 0.0, 1.0, 1.0, 0.0, 1.0, 1.0, 0.0, 1.0, 0.0, 1.0, 1.0, 0.0, 1.0, 1.0, 1.0, 1.0, 1.0, 0.0, 0.0, 1.0, 1.0, 0.0, 1.0, 1.0, 1.0, 0.0, 1.0, 1.0, 0.0, 0.0, 1.0, 1.0, 0.0, 0.0, 0.0, 1.0, 1.0, 1.0, 1.0, 1.0, 0.0, 0.0, 1.0, 0.0, 1.0, 1.0, 1.0, 1.0, 0.0, 1.0, 1.0, 1.0, 0.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 0.0, 0.0, 1.0, 1.0, 0.0, 0.0, 1.0, 1.0, 0.0, 1.0, 0.0, 0.0, 1.0, 1.0, 0.0, 1.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0, 1.0, 0.0, 0.0, 1.0, 0.0, 0.0, 1.0, 0.0, 1.0, 0.0, 1.0, 0.0, 0.0, 1.0, 1.0, 1.0, 0.0, 0.0, 0.0, 0.0, 1.0, 1.0, 1.0, 0.0, 0.0, 1.0, 1.0, 1.0, 0.0, 0.0, 0.0, 1.0, 1.0, 0.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 1.0, 0.0, 0.0, 1.0, 0.0, 1.0, 1.0, 1.0, 0.0, 1.0, 1.0, 1.0, 0.0, 0.0, 0.0, 0.0, 1.0, 0.0, 1.0, 1.0, 0.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 0.0, 0.0, 1.0, 1.0, 0.0, 1.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 1.0, 0.0, 1.0, 1.0, 0.0, 0.0, 1.0, 1.0, 0.0, 1.0, 1.0, 1.0, 0.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 0.0, 0.0, 1.0, 1.0, 1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 1.0, 0.0, 0.0, 1.0, 0.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 0.0, 0.0, 1.0, 1.0, 1.0, 0.0, 1.0, 1.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 1.0, 1.0, 1.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 1.0, 1.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.0, 0.0, 1.0, 0.0, 1.0, 1.0, 0.0, 0.0, 1.0, 0.0, 1.0, 1.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.0, 0.0, 1.0, 0.0, 1.0, 1.0, 1.0, 1.0, 0.0, 1.0, 1.0, 0.0, 1.0, 1.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 0.0, 1.0, 1.0, 0.0, 1.0, 0.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 1.0, 1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 1.0, 1.0, 0.0, 0.0, 1.0, 0.0, 1.0, 0.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0, 1.0, 0.0, 0.0, 1.0, 1.0, 1.0, 0.0, 0.0, 1.0, 1.0, 0.0, 1.0, 0.0, 1.0, 0.0, 1.0, 0.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 0.0, 1.0, 1.0, 1.0, 0.0, 1.0, 1.0, 1.0, 0.0, 1.0, 1.0, 1.0, 1.0, 1.0, 0.0, 0.0, 1.0, 0.0, 1.0, 0.0, 1.0, 1.0, 1.0, 1.0, 0.0, 0.0, 1.0, 0.0, 0.0, 1.0, 0.0, 1.0, 1.0, 0.0, 1.0, 0.0, 0.0, 1.0, 0.0, 0.0, 1.0, 1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 1.0, 1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 0.0, 1.0, 0.0, 1.0, 1.0, 1.0, 0.0, 1.0, 1.0, 1.0, 0.0, 0.0, 1.0, 0.0, 0.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 0.0, 0.0, 1.0, 0.0, 1.0, 1.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0, 1.0, 1.0, 1.0, 0.0, 0.0, 0.0, 1.0, 1.0, 0.0, 0.0, 1.0, 1.0, 0.0, 0.0, 1.0, 1.0, 1.0, 1.0, 0.0, 1.0, 1.0, 0.0, 1.0, 1.0, 0.0, 1.0, 0.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 0.0, 1.0, 1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 1.0, 0.0, 1.0, 1.0, 0.0, 0.0, 0.0, 1.0, 1.0, 0.0, 1.0, 0.0, 1.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 0.0, 1.0, 1.0, 0.0, 1.0, 1.0, 0.0, 1.0, 1.0, 1.0, 0.0, 1.0, 1.0, 1.0, 0.0, 0.0, 1.0, 1.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0, 1.0, 1.0, 0.0, 1.0, 1.0, 0.0, 1.0, 1.0, 1.0, 0.0, 1.0, 1.0, 1.0, 0.0, 0.0, 0.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 0.0, 0.0, 1.0, 0.0, 1.0, 1.0, 0.0, 0.0, 1.0, 0.0, 0.0, 1.0, 1.0, 0.0, 0.0, 1.0, 1.0, 0.0, 1.0, 1.0, 1.0, 1.0, 1.0, 0.0, 0.0, 0.0, 0.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 0.0, 0.0, 1.0, 0.0, 1.0, 1.0, 1.0, 0.0, 1.0, 1.0, 0.0, 1.0, 1.0, 1.0, 0.0, 1.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0, 1.0, 1.0, 1.0, 1.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.0, 1.0, 0.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 0.0, 1.0, 1.0, 0.0, 1.0, 0.0, 0.0, 0.0, 0.0, 1.0, 1.0, 1.0, 1.0, 1.0, 0.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0, 1.0, 1.0, 0.0, 1.0, 0.0, 1.0, 1.0, 0.0, 1.0, 0.0, 0.0, 1.0, 0.0, 1.0, 0.0, 1.0, 1.0, 0.0, 1.0, 0.0, 0.0, 1.0, 1.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0, 1.0, 0.0, 1.0, 1.0, 1.0, 0.0, 1.0, 0.0, 0.0, 1.0, 1.0, 0.0, 1.0, 0.0, 1.0, 1.0, 0.0, 0.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 0.0, 0.0, 1.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 1.0, 0.0, 1.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 1.0, 1.0, 1.0, 0.0, 1.0, 1.0, 0.0, 0.0, 0.0, 1.0, 1.0, 1.0, 1.0, 0.0, 0.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 0.0, 0.0, 0.0, 0.0, 1.0, 1.0, 0.0, 1.0, 1.0, 0.0, 1.0, 1.0, 1.0, 0.0, 1.0, 1.0, 0.0, 0.0, 0.0, 1.0, 1.0, 1.0, 0.0, 1.0, 0.0, 1.0, 1.0, 1.0, 0.0, 1.0, 0.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 0.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 1.0, 0.0, 1.0, 0.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 0.0, 1.0, 0.0, 0.0, 1.0, 1.0, 0.0, 0.0, 1.0, 1.0, 1.0, 0.0, 1.0, 1.0, 1.0, 1.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 0.0, 1.0, 1.0, 1.0, 1.0, 1.0, 0.0, 1.0, 0.0, 1.0, 0.0, 0.0, 1.0, 0.0, 0.0, 1.0, 1.0, 1.0, 1.0, 1.0, 0.0, 1.0, 1.0, 1.0, 1.0, 0.0, 0.0, 0.0, 0.0, 1.0, 0.0, 1.0, 1.0, 0.0, 1.0, 1.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.0, 1.0, 0.0, 1.0, 1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 1.0, 0.0, 0.0, 1.0, 0.0, 1.0, 0.0, 0.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 0.0, 1.0, 1.0, 1.0, 0.0, 0.0, 0.0, 1.0, 1.0, 0.0, 1.0, 1.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 0.0, 1.0, 0.0, 1.0, 1.0, 1.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.0, 0.0, 1.0, 1.0, 0.0, 1.0, 1.0, 1.0, 1.0, 0.0, 1.0, 1.0, 1.0, 1.0, 1.0, 0.0, 0.0, 1.0, 1.0, 0.0, 1.0, 1.0, 0.0, 0.0, 1.0, 1.0, 0.0, 0.0, 0.0, 1.0, 1.0, 0.0, 1.0, 0.0, 0.0, 1.0, 1.0, 1.0, 0.0, 1.0, 1.0, 1.0, 0.0, 1.0, 1.0, 0.0, 0.0, 1.0, 1.0, 1.0, 1.0, 1.0, 0.0, 0.0, 1.0, 1.0, 0.0, 0.0, 1.0, 0.0, 1.0, 1.0, 1.0, 0.0, 1.0, 0.0, 1.0, 1.0, 1.0, 0.0, 0.0, 0.0, 0.0, 1.0, 0.0, 1.0, 0.0, 0.0, 0.0, 0.0, 1.0, 1.0, 0.0, 0.0, 0.0, 1.0, 1.0, 0.0, 0.0, 1.0, 1.0, 0.0, 1.0, 1.0, 1.0, 0.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 0.0, 1.0, 0.0, 0.0, 0.0]
'''
import matplotlib.pyplot as plt
plt.bar(x=range(len(rlist)), height=rlist)
plt.show()
print()
print(Q_table)
'''
[[3.40930070e-01 9.87032128e-03 8.94418510e-03 1.02029252e-02]
[2.07743017e-03 1.26165876e-03 0.00000000e+00 3.46371714e-01]
[1.24578819e-01 2.63078853e-03 2.56040408e-03 5.17443975e-03]
[4.98747107e-04 5.76954629e-04 3.24304733e-04 4.87779643e-03]
[2.13671850e-01 8.82299035e-03 4.02842109e-04 4.37231146e-04]
[0.00000000e+00 0.00000000e+00 0.00000000e+00 0.00000000e+00]
[4.99331151e-03 7.20578454e-05 7.83352210e-06 1.74965096e-04]
[0.00000000e+00 0.00000000e+00 0.00000000e+00 0.00000000e+00]
[3.28239444e-04 2.40048812e-03 8.20258088e-05 4.28869592e-01]
[4.50882090e-03 7.70377915e-02 1.92129223e-03 3.50460147e-03]
[2.28811081e-02 0.00000000e+00 0.00000000e+00 2.95603766e-04]
[0.00000000e+00 0.00000000e+00 0.00000000e+00 0.00000000e+00]
[0.00000000e+00 0.00000000e+00 0.00000000e+00 0.00000000e+00]
[1.21544125e-03 0.00000000e+00 3.00012613e-01 0.00000000e+00]
[0.00000000e+00 0.00000000e+00 0.00000000e+00 9.17452559e-02]
[0.00000000e+00 0.00000000e+00 0.00000000e+00 0.00000000e+00]]
'''
NNQL 예제
import torch
import torch.nn as nn
import torch.optim as optim
import torch.nn.functional as F
import gymnasium as gym
import numpy as np
env = gym.make('FrozenLake-v1')
def onehot2Tensor(state):
tmp = np.zeros(16)
tmp[state] = 1
vector = np.array(tmp, dtype=np.float32)
tensor = torch.from_numpy(vector).float()
return tensor
class QNet(nn.Module):
def __init__(self):
super().__init__()
self.fc1 = nn.Linear(16,64)
self.fc2 = nn.Linear(64,96)
self.fc3 = nn.Linear(96,96)
self.fc4 = nn.Linear(96,64)
self.fc5 = nn.Linear(64,4)
def forward(self,x):
out = F.relu(self.fc1(x))
out = F.relu(self.fc2(out))
out = F.relu(self.fc3(out))
out = F.relu(self.fc4(out))
y = self.fc5(out)
return y
model = QNet()
def applyModel(input_tensor):
output_tensor = model(input_tensor)
output_array = output_tensor.data.numpy()
return output_tensor, output_array
rewardALL = 0
loss_func = nn.MSELoss()
optimizer = optim.Adam(model.parameters(), lr=0.01)
rlist = []
for episode in range(3000):
current_state = env.reset()
episode_reward = 0
total_loss = 0
for t in range(100):
current_tensor = onehot2Tensor(current_state[0])
current_output_tensor, current_output_array = applyModel(current_tensor)
if np.random.rand() < 0.1:
action = env.action_space.sample()
else:
action = np.argmax(current_output_array)
next_state, reward, terminated, truncated, _ = env.step(action)
next_state_tensor = onehot2Tensor(next_state)
next_output_tensor, next_output_array = applyModel(next_state_tensor)
target = reward + 0.99 * np.max(next_output_array)
q_array = np.copy(current_output_array)
q_array[action] = target
target_tensor = torch.Tensor(q_array)
optimizer.zero_grad()
loss = loss_func(current_output_tensor, target_tensor)
loss.backward()
optimizer.step()
total_loss += loss.item()
done = terminated | truncated
if done:
episode_reward += reward
break
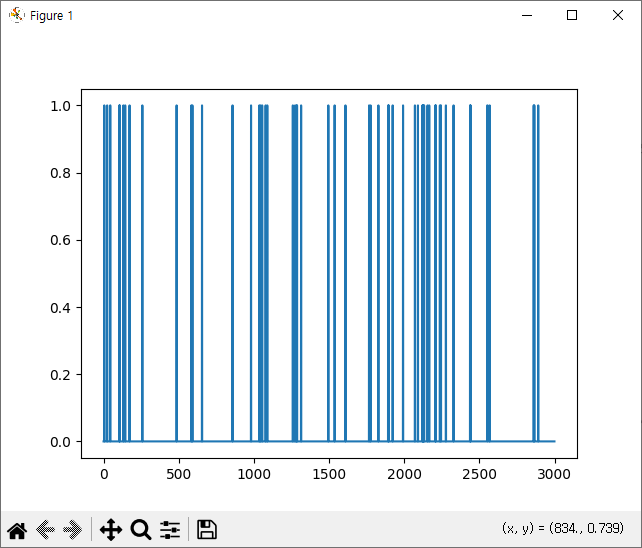
rlist.append(episode_reward)
print(f'episode: {episode+1} total_loss : {total_loss:.5f}')
import matplotlib.pyplot as plt
plt.plot(rlist)
plt.show()
classic control

DQN예제
import gymnasium as gym
import collections
import random
import torch
import torch.nn as nn
import torch.optim as optim
import torch.nn.functional as F
learning_rate = 0.0005
discount_factor = 0.98
buffer_limit = 50000
batch_size = 32
class ReplayMemory:
def __init__(self):
self.buffer = collections.deque(maxlen=buffer_limit)
def put(self, transition):
self.buffer.append(transition)
def sample(self,n):
mini_batch = random.sample(self.buffer, n)
state_lst, action_lst, reward_lst, next_state_lst, done_lst = [], [], [], [], []
for transition in mini_batch:
state, action, reward, next_state, done = transition
state_lst.append(state)
action_lst.append([action])
reward_lst.append([reward])
next_state_lst.append(next_state)
done_lst.append([done])
return torch.tensor(state_lst, dtype=torch.float), torch.tensor(action_lst), \
torch.tensor(reward_lst), torch.tensor(next_state_lst, dtype=torch.float), \
torch.tensor(done_lst)
def size(self):
return len(self.buffer)
class QNet(nn.Module):
def __init__(self):
super().__init__()
self.fc1 = nn.Linear(4,128)
self.fc2 = nn.Linear(128,128)
self.fc3 = nn.Linear(128,2)
def forward(self,x):
out = F.relu(self.fc1(x))
out = F.relu(self.fc2(out))
y = self.fc3(out)
return y
def sample_action(self,state,epsilon):
out = self.forward(state)
rvalue = random.random()
if rvalue < epsilon:
return random.randint(0,1)
else:
return out.argmax().item()
def train(q, q_target, memory, optimizer):
for i in range(10):
state, action, reward, next_state, done = memory.sample(batch_size)
q_out = q(state) # current_q_value (batch_size, 2)
q_a = q_out.gather(1, action) # current_q_value[action]
max_q_next_value = q_target(next_state).max(1)[0].unsqueeze(1)
target = reward + discount_factor * max_q_next_value * done
loss = F.smooth_l1_loss(q_a, target)
optimizer.zero_grad()
loss.backward()
optimizer.step()
q = QNet()
q_target = QNet()
q_target.load_state_dict(q.state_dict()) # 동기화
memory = ReplayMemory()
optimizer = optim.Adam(q.parameters(), lr=learning_rate)
print_interval = 20
score = 0.0
env = gym.make('CartPole-v1')
for episode in range(10000):
epsilon = max(0.01, 0.1 - 0.01*(episode/200)) # 10% => 1%
state = env.reset()[0]
done = False
while not done:
action = q.sample_action(torch.from_numpy(state).float(), epsilon)
next_state, reward, terminated, truncated, info = env.step(action)
done = terminated | truncated
done_mask = 0.0 if done else 1.0
memory.put((state, action, reward/100.0, next_state, done_mask))
state = next_state
score += reward
if done:
break
if memory.size() > 2000:
train(q, q_target, memory, optimizer)
if episode % print_interval == 0 and episode!=0:
q_target.load_state_dict(q.state_dict())
print('n_episode:{}, score:{:.1f}, n_buffer:{}, epsilon:{:.1f}%'.format(
episode, score/print_interval, memory.size(), epsilon*100
))
score= 0.0
env.close()
Taxi 예제
import gymnasium as gym
import numpy as np
env = gym.make("Taxi-v3")
n_states = env.observation_space.n
n_actions = env.action_space.n
print(n_states)
print(n_actions)
# 초기 정책: 모든 상태에서 모든 행동을 균등하게 선택
policy = np.ones([n_states, n_actions]) / n_actions
def policy_evaluation(policy, env, gamma=0.99, theta=1e-5):
V = np.zeros(n_states)
while True:
delta = 0
for s in range(n_states):
v = 0
for a, action_prob in enumerate(policy[s]):
for prob, next_state, reward, _ in env.P[s][a]: # 상태, 행동 -> env.P[state][action] = [(probability, next_state)]
v += action_prob * prob * (reward + gamma * V[next_state])
delta = max(delta, abs(v - V[s]))
V[s] = v
if delta < theta:
break
return V
def policy_improvement(V, env, gamma=0.99):
policy_stable = True
new_policy = np.zeros([n_states, n_actions])
for s in range(n_states):
action_values = np.zeros(n_actions)
for a in range(n_actions):
for prob, next_state, reward, _ in env.P[s][a]:
action_values[a] += prob * (reward + gamma * V[next_state])
best_action = np.argmax(action_values)
new_policy[s] = np.eye(n_actions)[best_action]
if not np.array_equal(new_policy[s], policy[s]):
policy_stable = False
return new_policy, policy_stable
i = 0
# 정책 반복
while True:
i+=1
print('학습 진행:', i)
V = policy_evaluation(policy,env)
policy, stable = policy_improvement(V, env)
if stable:
break
import time
# 학습된 정책 테스트
env = gym.make('Taxi-v3', render_mode='rgb_array')
total_rewards = 0
import matplotlib.pyplot as plt
for episode in range(100):
state, _ = env.reset()
frames = []
frames.append(env.render())
# env.render()
done = False
while not done:
action = np.argmax(policy[state])
state, reward, terminated, truncated, _ = env.step(action)
done = terminated | truncated
frames.append(env.render())
# env.render()
total_rewards += reward
print(f'{episode+1}')
for i , frame in enumerate(frames):
plt.imshow(frame)
plt.axis('off')
plt.title(f'frame{i}')
plt.pause(0.3)
plt.show()
print(f"100 에피소드 동안 평균 보상: {total_rewards / 100}")


+AI to AI+