NAVSIM: Data-Driven Non-Reactive Autonomous Vehicle Simulation and Benchmarking
[AD] dataset
목록 보기
5/12
GPT의 대답
🔍 기존 평가 방식의 문제점
1. "오픈 루프" vs "클로즈드 루프" 갈등
- 오픈 루프 평가 (예: 주행 궤적 오차 측정)
- 장점: 실제 데이터 사용 → 현실 반영
- 단점: 차량의 결정이 환경에 미치는 영향 무시 (예: 내가 방향 틀면 다른 차들이 반응하는 상황 재현 불가)
- 클로즈드 루프 평가 (전체 시뮬레이션)
- 장점: 실제 상황처럼 상호작용 반영
- 단점: 계산량 폭발적 증가, 시뮬레이터와 현실의 괴리 문제
2. 현존 벤치마크의 한계
- nuScenes 등 기존 데이터셋: 24개 장면 유형만 포함 → 실제 복잡한 도로 상황 반영 부족
- 평가 기준 불일치: 연구팀마다 자체 평가 방식 사용 → 결과 비교 불가능
🚘 NAVSIM이 해결한 핵심 문제
- (OpenScene 데이터셋, nuPlan 기반)를 활용
"비반응형 시뮬레이션" 이란?
- 4초 미래 예측: 실제 데이터 기반으로 4초 동안의 장면 전개 시뮬레이션
- 환경 고정: 내 차의 결정이 주변 차량/보행자에 영향을 주지 않음 (고정된 궤적 사용)
- BEV(조감도) 추상화: HD 맵 + 센서 데이터 조합으로 가상 공간 생성
💡 왜 이 방식이 좋은가?
- 실제 데이터 기반 → 현실성 보장
- 반응 계산 생략 → 47배 빠른 평가
- 동일 조건에서 모든 알고리즘 테스트 가능
🛠️ NAVSIM 시스템 작동 원리
3대 핵심 모듈
-
장면 전개기 (Scene Unroller)
- 10Hz(초당 10프레임)로 BEV 장면 생성
- 주변 차량: 실제 궤적을 보간해 예측 (움직임 추정)
- 도로 지형: HD 맵으로 정확히 재현
-
데이터 필터링 시스템
- 1,000시간 실제 주행 데이터 중 '어려운 상황'만 선별
- 예시 필터링 조건:
- 보호되지 않은 좌회전 (신호등 없는 교차로)
- 보행자 밀집 지역
- 복합 교차로
구체적으로 주변 agents를 어떻게 모델링했는가
- 2Hz 데이터를 10Hz로 선형 보간하여 시간 해상도를 높임.
- 보간된 데이터를 HD 맵과 정렬해 물리적으로 일관된 궤적으로 변환.
- LQR 컨트롤러로 궤적이 물리적으로 실행 가능한지 검증.
- 키네마틱 바이시클 모델로 차량 움직임을 시뮬레이션하여 최종 궤적 생성.
🏆 CVPR 2024 대회 결과에서 드러난 통찰
놀라운 발견들
- "작은 모델도 잘 할 수 있다": 2500만 파라미터 모델(TransFuser)이 12억 파라미터 모델(UniAD)과 0.82 vs 0.84로 근접 성적
- 카메라 vs 라이다:
- 카메라 단독: 승차감 점수 우세(Δ+0.15) but 저조도 환경에서 충돌 발생
- 라이다: 안정성은 좋으나 계산량 많음
- BEV 해상도: 512x512 이상에선 성능 향상 미미
평가 방식 검증
- 실제 주행 테스트와 PDMS 점수 91% 일치
- 기존 ADE/FDE(궤적 오차) 메트릭보다 실제 성능 예측력 25% 향상
💡 요약: NAVSIM이 바꾸는 자율주행 평가
- 공정한 경쟁장 제공: 누구나 클라우드로 동일 조건 평가
- 현실성+효율성 동시 확보: 실제 데이터 기반 빠른 평가
- 새로운 연구 방향 제시
- "더 큰 모델 = 더 좋은 성능"이라는 고정관념 깸
- 센서 융합 방식에 대한 재고 유발
PDMS
- [navsim/planning/simulation/planner/pdm_planner/scoring/pdm_scorer.py] 참고하면 됨
- Predictive Driver Model Score
- 최종 점수 범위는 [0,1]로, 1에 가까울수록 주행 성능이 우수하다는 뜻
- {}: 이산값
- []: 연속값
PDMS = NC * DAC * (5*TTC + 5*EP + 2*C) / (5+5+2)
| Metric | Weight | Range |
|---|---|---|
| No at-fault Collisions (NC) (충돌) | 하드 패널티 | {0(충돌), 1/2(적당한 충돌), 1(충돌 x)} |
| Drivable Area Compliance (DAC) | 하드 패널티 | {0, 1} |
| Time to Collision (TTC) within bound (4.5초 미래까지 충돌이 없어야 함) | 5 | {0, 1} |
| Ego Progress (EP) | 5 | [0, 1] |
| Comfort (C) (가속도,jerk) | 2 | {0, 1} |
No at-fault Collisions (NC)
- 0
- 아래 3가지
- ACTIVE_FRONT_COLLISION(
ego 차량의 전면(프론트 범퍼)에서 발생한 충돌)- 단, 이때 주변 객체가 실제로 이동하는 차량(AGENT_TYPES에 속하는 객체)인 경우엔 완전한 패널티로 NC 점수를 0으로 설정
- STOPPED_TRACK_COLLISION(
주변 객체(트랙)가 정지한 상태에서의 충돌)- 단, 이때 주변 객체가 실제로 이동하는 차량(AGENT_TYPES에 속하는 객체)인 경우엔 완전한 패널티로 NC 점수를 0으로 설정
- 만약 ego 차량이 여러 차선에 걸쳐 있거나 비주행 영역에 있을 때, ACTIVE_LATERAL_COLLISION(측면 충돌) 발생한 경우
- ACTIVE_FRONT_COLLISION(
- 아래 3가지
- 0.5
- STOPPED_TRACK_COLLISION (주변 객체(트랙)가 정지한 상태에서의 충돌)
- 1
- 충돌이 없거나 책임 없는 충돌(위 케이스에 해당하지 않는 경우)
Time to Collision
- 미래 궤적의 각 시점마다, CV model로 4.5초 동안 주변 객체와 충돌이 없는지 체크
- 뒤에서 차가 와서 충돌하거나, 내 차가 정지해 있었으면 -> 충돌 X
Comfort (C)
- [navsim/planning/simulation/planner/pdm_planner/scoring/pdm_scorer_utils.py] 참고하면 됨
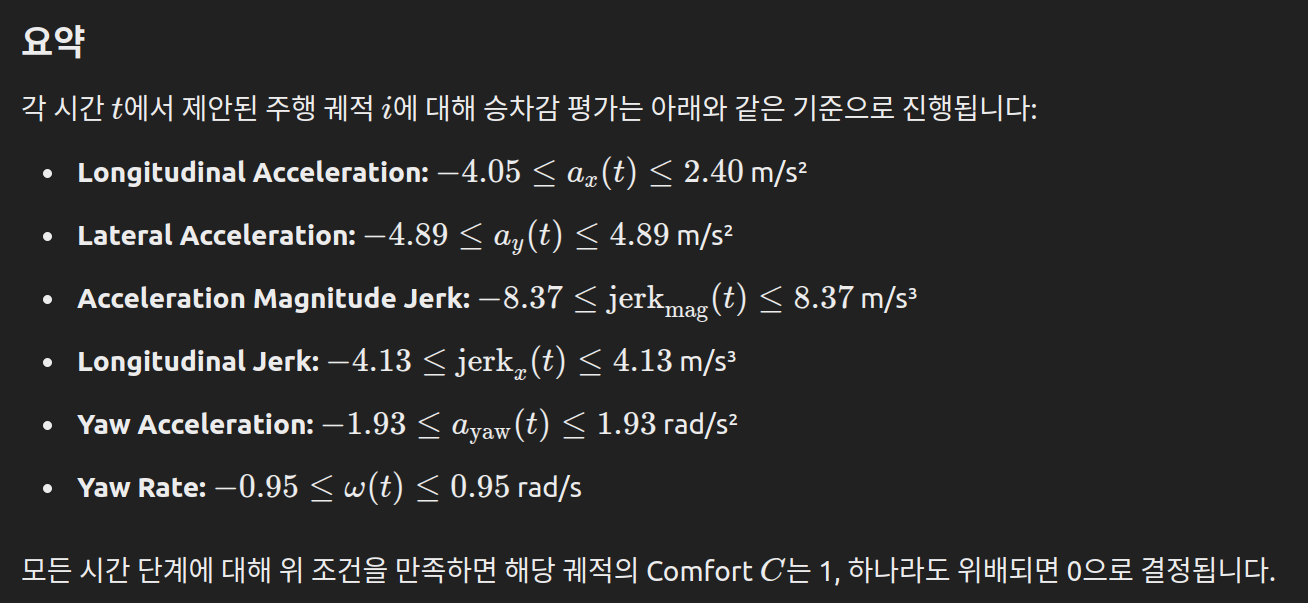

ad_official