[AD] dataset
1.nuScenes
차량 센서 데이터로만 주변 환경을 검지하면차선, 신호등, 정적장애물, 동적장애물 검출 방법lidar, radar, camera 등으로 검지한 값을 활용한다.차량에 부착된 센서 종류가 달라지면 학습을 다시 시켜야 하는 문제GT 데이터를 쓰면,실제 서비스 시에는 GT 값을
2.nuscenes tutorial

이 튜토리얼은 nuScenes의 HD 지도 데이터를 “확장(expansion)”하여 활용하는 방법을 상세하게 다룹니다. 주요 내용을 아래와 같이 정리할 수 있습니다.HD Map 데이터 개요 nuScenes는 고정밀 벡터 HD map을 제공합니다. 이 지도에는 도로,
3.nuscenes dataset 구조
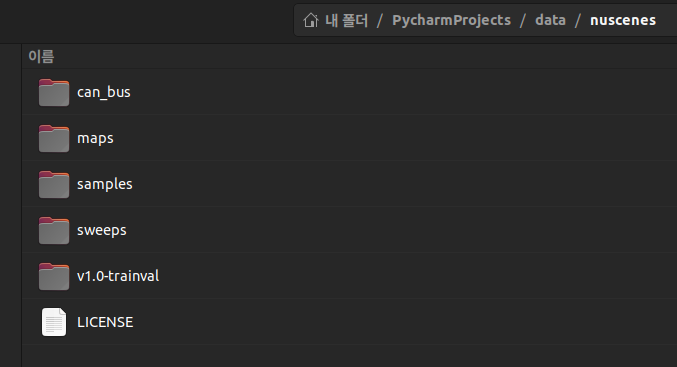
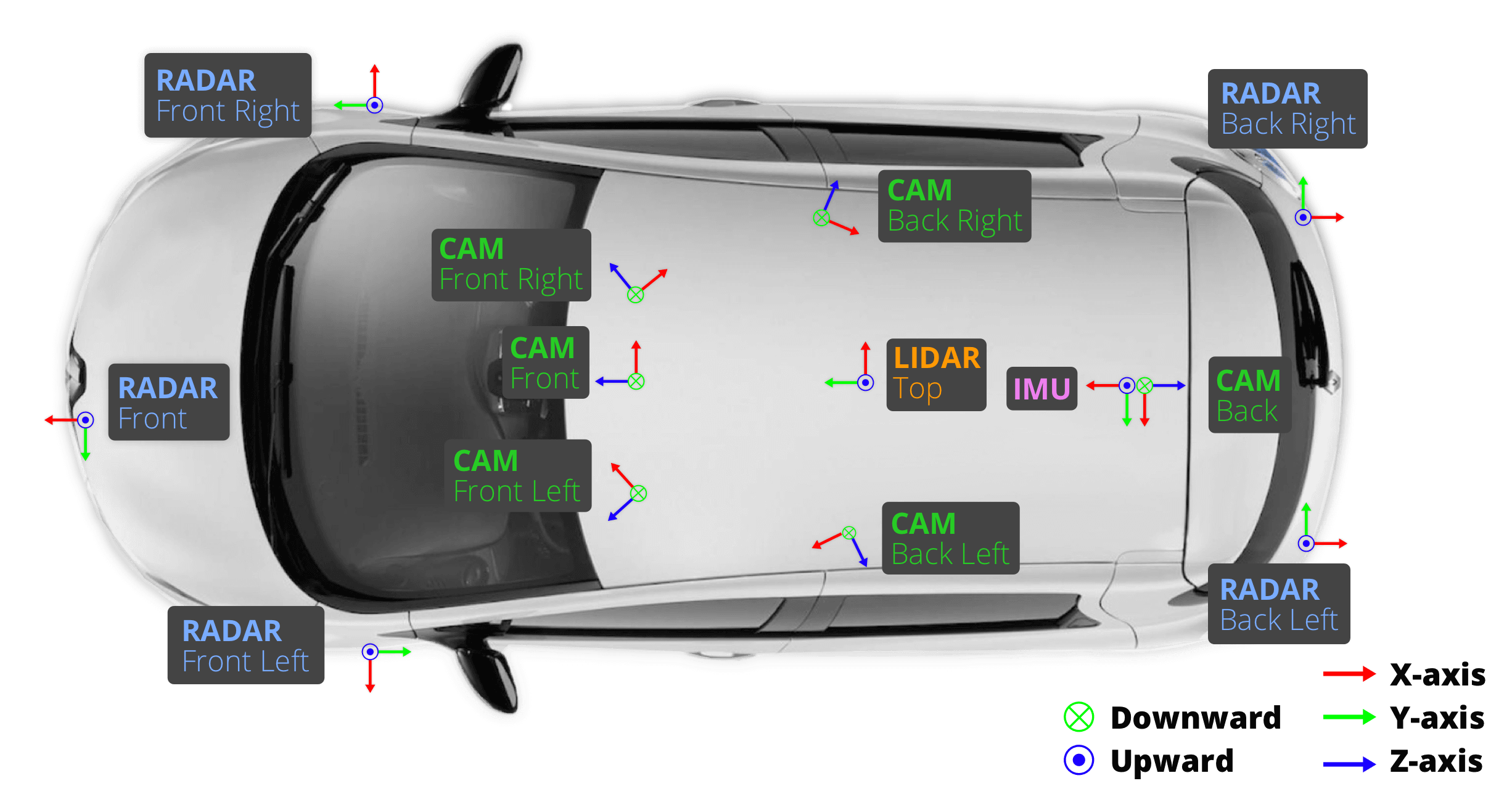
자율주행차 내부의 다양한 센서 및 ECU(Electronic Control Unit)에서 발생하는 정보를 시간 축에 따라 기록한 것차량 동역학, 조향·가속·제동 입력, ECU 내부 상태 등을 재현하는 데 사용scene-0001 폴더 안에 존재하는 8개의 JSON 파일은
4.[nuscenes] BEV map 만드는 법
출력: NumPy 배열 shape: (C, H, W) C: 선택한 layer 개수 (예: \['drivable_area', 'walkway'] → 2 채널) H, W: 지정한 canvas_size (예: (1000, 1000))예시 코드:출력: (Figure,
5.NAVSIM: Data-Driven Non-Reactive Autonomous Vehicle Simulation and Benchmarking
오픈 루프 평가 (예: 주행 궤적 오차 측정)장점: 실제 데이터 사용 → 현실 반영단점: 차량의 결정이 환경에 미치는 영향 무시 (예: 내가 방향 틀면 다른 차들이 반응하는 상황 재현 불가)클로즈드 루프 평가 (전체 시뮬레이션)장점: 실제 상황처럼 상호작용 반영단점:
6.OpenScene dataset
OpenScene 데이터셋은 자율주행의 3D 장면 이해(3D scene understanding), 특히 점유(occupancy) 예측 및 엔드투엔드 주행(End-to-End Driving) 관련 연구를 위해 설계된, nuPlan 데이터셋을 기반으로 한 축소판(comp
7.AD dataset 4종류 비교
아래는 nuscenes, nuPlan, OpenScene, NAVSIM의 주요 특징을 매우 자세하게 비교한 표입니다.
8.LimSim
LimSim 시뮬레이터는 자율주행 시스템의 개발과 테스트를 위해 설계된 플랫폼으로, 주변 에이전트(차량, 보행자 등)의 모델링과 반응성에 대해 다음과 같은 특징을 가지고 있습니다:시나리오 영역 내의 차량들은 정밀한 동적 상호작용을 위해 “PDP 프로세스”(Predict
9.Navsim 데이터셋 split
standard 스플릿인 trainval, test, mini는 OpenScene 데이터셋에서 제공데이터는 nuPlan 데이터셋에 해당하며 2Hz로 다운샘플링된 데이터를 사용\*참고: 센서 데이터의 경우 navtrain은 히스토리를 포함하면 445GB, 히스토리 없이
10.[NavSim] agents의 이해와 생성
아래는 원문의 내용을 그대로 한국어로 번역한 결과입니다.에이전트를 정의하는 것은 navsim.agents.abstract_agent.AbstractAgent를 상속받는 새로운 클래스를 생성하는 것부터 시작합니다.이 클래스를 좀 더 자세히 살펴보겠습니다. 다음 메서드들을
11.[NavSim] navsim/planning/script/run_pdm_score.py
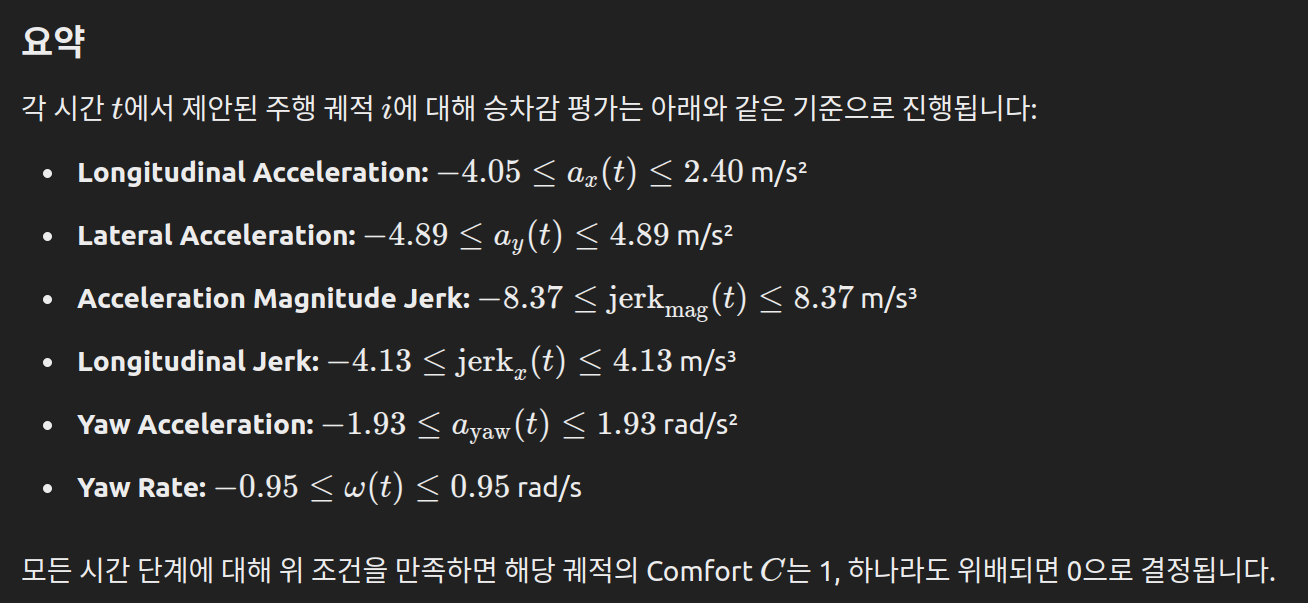
환경 설정 및 객체 생성: 설정 파일을 바탕으로 시뮬레이터(PDMSimulator), 점수 계산기(PDMScorer), 평가할 에이전트(AbstractAgent)를 생성하고 초기화데이터 로딩: 메트릭 캐시(MetricCache)와 장면 데이터(SceneLoader)
12.[Navsim] visualization
https://github.com/autonomousvision/navsim/blob/main/tutorial/tutorial_visualization.ipynbScene 객체는 하나의 주행 시나리오 전체를 담고 있는 컨테이너 이 객체에는 여러 프레임(시간 순