
나는 개발용 메인 PC로 M1 Macbook Air를 사용하고 있다. 그리고 동시에 자율주행을 공부하고 있는데, 자율주행을 공부할 때에는 ROS(Robot Operation System)을 사용한다.
앞선 글에서 Multipass를 사용해 개발환경을 설정했었으나, Network 문제가 많이 발생하고 이를 해결하기 어렵다. Docker를 사용해서 network를 host로 설정하면, Native 환경에서 설정한 것과 유사하게 개발 환경을 설정할 수 있다.
📔 사전지식 학습하기
ROS(Robot Operation System)
ROS는 로봇을 쉽게 개발하고 제어할 수 있는 종합적 환경을 제공하는 운영체제이다. 운영체제이지만, 일반적인 윈도우, 맥, Ubuntu와 다르게 그 위에서 작동하는 Middleware와 같은 플랫폼이다. 다양한 하드웨어 업체에서 ROS에서 사용할 수 있는 드라이버와 패키지를 제공하고 있으며, PC의 제약 없이 사용할 수 있다는 장점이 존재한다.
ROS는 Ubuntu, Mac, Windows 상관 없이 설치가 가능하다. 하지만, ROS에서 사용하는 모든 패키지들이 환경에 상관없이 사용 가능하다는 것은 아니다. 한 가지의 예로 살펴보자. 딥러닝을 할 때 Python을 주로 사용하고, Python에서 OpenCV를 패키지로 불러와 사용한다. OpenCV를 pip 명령어로 설치하게 된다면, CPU를 사용해 동작한다. 이렇게 설정한 환경은 CUDA를 사용해 빌드한 OpenCV에 비해 성능이 처참하게 떨어진다. 여기서 문제점을 찾아볼 수 있다. 환경에 상관 없이 ROS를 설치해서 사용할 수 있으나, CUDA 기반의 OpenCV는 NVIDIA GPU를 사용한 플랫폼에서만 사용할 수 있다.
참고로 ROS에서는 OpenCV를 다음과 같은 방식으로 사용하고 있다. PC에 설치된 OpenCV를 ros-cv-bridge라는 매니저가 불러와서 사용할 수 있도록 연결해주고 있다.
본 글에서도 이러한 문제를 해결하기 위해 노력하지만, 아직 적절한 해결 방법을 찾지 못했다. 따라서, 맥에서 본 환경을 세팅할 때에는 다음과 같은 문제들이 존재한다.
- OpenCV와 같은 플랫폼을 사용할 수 없다. 이는 Mac에는 CUDA가 없기 때문이다. 하지만, Mac의 NPU와 GPU를 이용해 OpenCV를 구성할 수 있는데, 이것을 Mapping 하는 형태로 환경 세팅을 추후에 시도해 볼 것이다.
- OpenGL을 사용할 수 없다. M1 Mac은 OpenGL을 사용하지 않는다. ROS의 시뮬레이션 환경인 Gazebo는 OpenGL을 사용한다. 이를 구동할 수가 없다.
이러한 문제를 제쳐두고서라도, 가벼운 Node의 개발은 Mac에서도 가능하기에 이 환경을 구성해보려 한다.
Docker
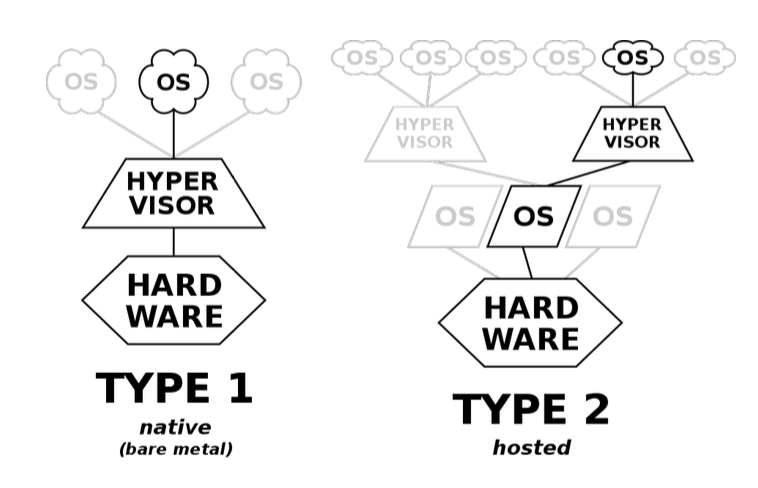
Docker는 OS의 가상화 플랫폼이다. Hypervisor는 Type1과 Type2로 구분된다.
Type1은 하드웨어 위에 Hypervisor를 구축하고, 여러 OS를 위에 구현하는 개념이다. 각각의 독립된 환경을 제공하기에는 어렵지만, 하드웨어의 자원 낭비를 줄일 수 있는 이점이 존재한다.
Type2는 OS 위에 Hypervisor를 구축하고, OS를 위에 추가로 구현하는 방식이다. VMWare, Virtual Box, UTM 등 일반적으로 사용하는 가상화 SW가 여기에 해당한다. 많은 자원을 필요로 하나, 다른 장치에 이식이 쉽고, 높은 격리성과 캡슐화가 장점으로 작용한다.
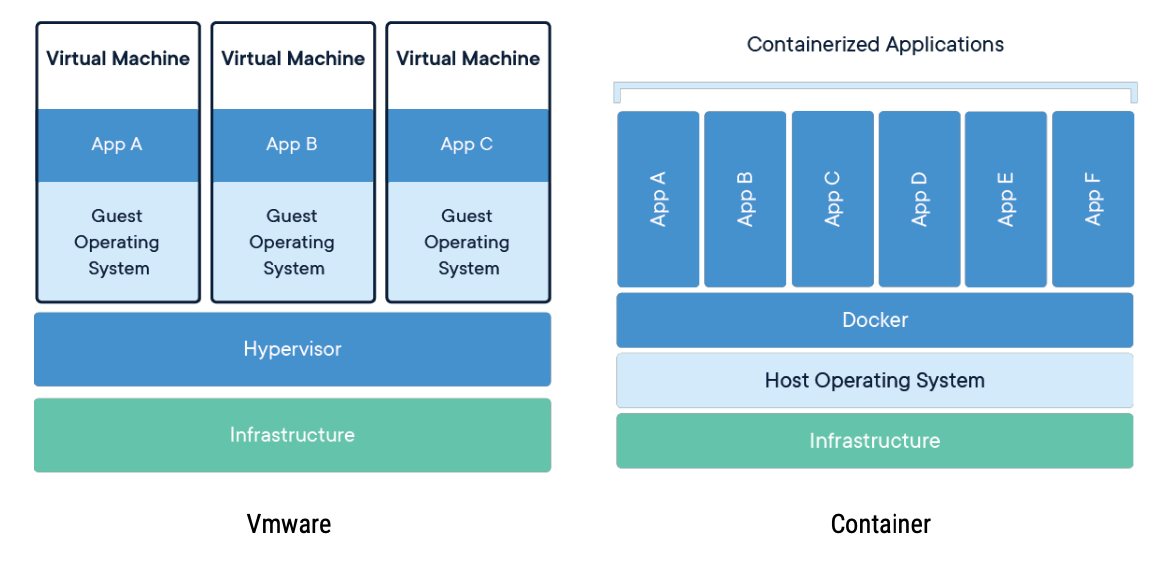
Docker는 Type1과 Type2 그 사이에 해당한다. Virtual Machine과 다르게 운영체제 위에 Hypervisor가 붙지 않고, 도커 엔진 위에 여러 컨테이너가 바로 구동된다. App마다 다른 OS가 하위에 설치되야 하는 Virtual Machine기법과 다르게 자원 낭비가 심하지 않고, Container를 통해 다른 쉽게 이식할 수 있는 환경을 제공한다.
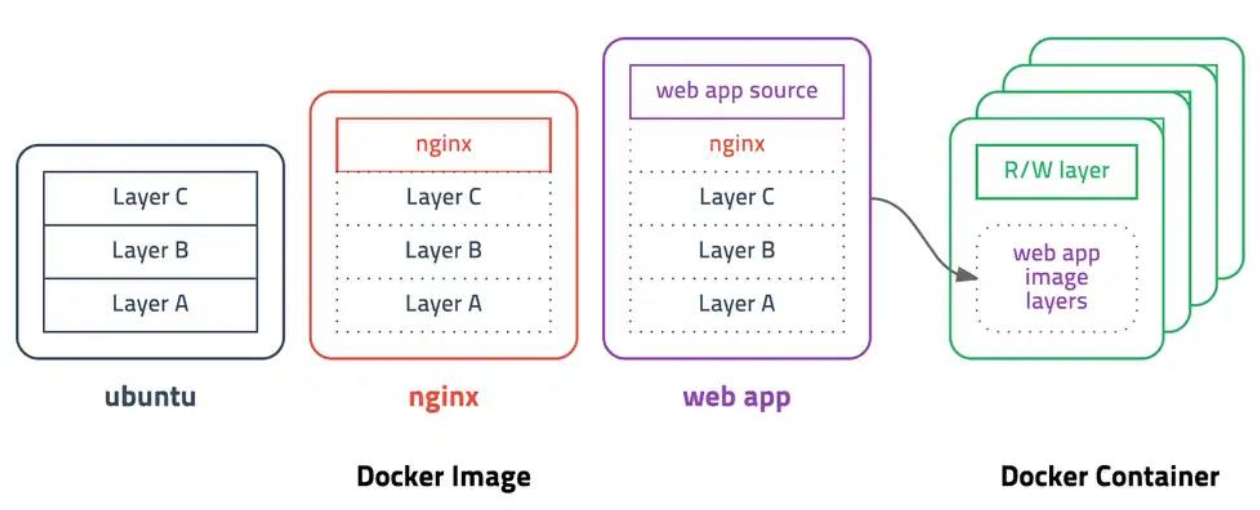
내가 만든 도커의 컨테이너를 Image로 만들고, Image를 파일이나 Docker Hub를 통해 쉽게 다른 사람에게 전달해 줄 수 있는 장점이 있다.
Docker는 Layer 기법을 사용한다는 특징이 있다. 기존의 만들어둔 환경에 추가적인 기능이 필요하다면, 그 이미지를 활용해 이전 단계를 생략할 수 있다. DockerHub와 Layer 기법은 엄청난 상호 작용을 하는데, 다른 사람이 내가 필요한 환경까지 구축해 이미지를 Docker Hub에 올려뒀다면, 이를 가져와 간단한 작업만 해주면된다.
🖥️ ROS 개발환경 구성하기
Docker 설치하기
Docker는 기본적으로 CLI(Command Line Interface)를 지원한다. Homebrew를 이용해 Docker를 설치해도 되나, 도커 공식 홈페이지에서 받아서 그냥 설치하면 된다.
- Ubuntu 환경에서는 APT를 사용해 CLI 환경으로 구성할 수 있다.
- Windows 환경에서는 WSL(Windows subsystem for Linux)를 설치한 뒤, Docker를 설치하면 된다. 하지만, 이 때문에 자원의 효율성이 떨어진다.
Docker를 설치했다면, 다음 명령어를 통해 이미지를 관리할 수 있다. 이미지는 Docker file을 통해 레이어들을 직접 커스텀해 생성하는 방식이 있고, 단순히 Pull을 통해 이미지를 Docker Hub에서 불러오는 방식이 존재한다.
# 도커 프로세스 목록 보기
docker ps
# 이미지 목록 보기
docker images
# Docker hub에서 이미지 가져오기
docker pull [이미지 이름]:[태그]
# Docker file을 통한 이미지 생성
docker build -t [이미지 이름]:[태그] [Dockerfile Path]
# 현재 컨테이너를 이미지로 저장하기
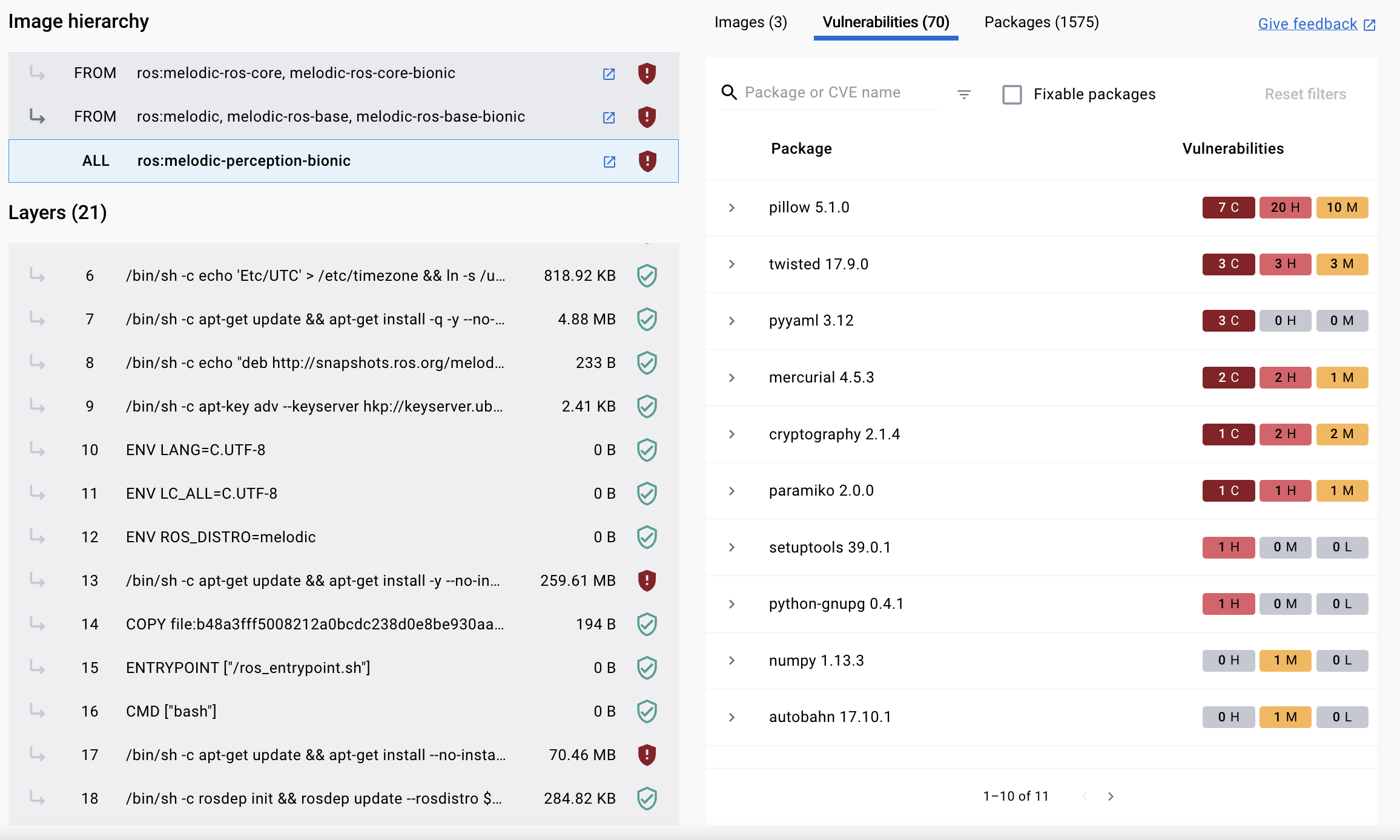
docker commit [컨테이너 ID] [이미지 이름]:[태그]Docker Hub에 ROS로 검색을 하게 된다면, ROS의 공식 도커 이미지가 제공된다. 태그에서 원하는 버전을 검색해보면, 다양한 버전이 제공되고 있음을 알 수 있다.
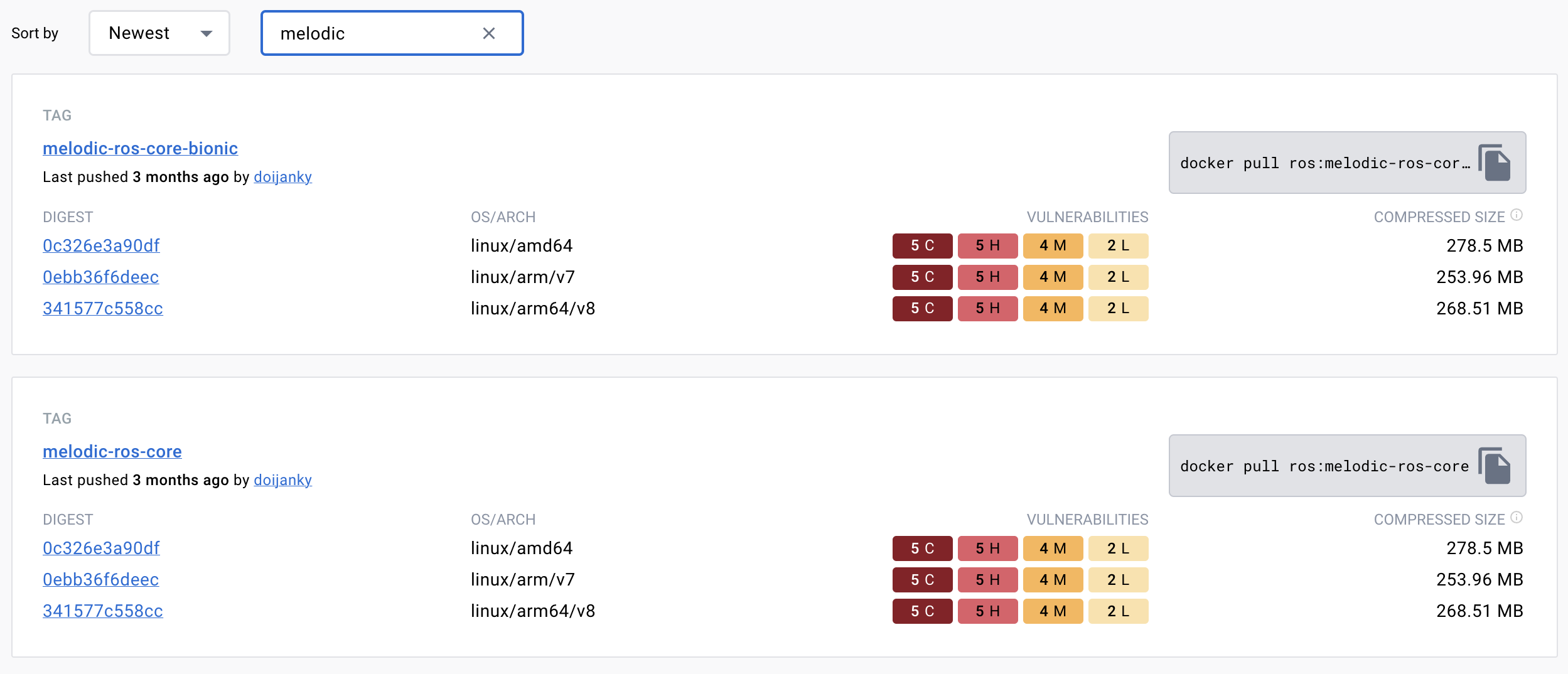
용량이 가장 클수록 가장 많은 패키지들이 포함되어 있다는 뜻이다. 용도에 맞게 받으면 되나, 개발을 공부할 때에는 가장 많은 환경을 모두 구성해야 한다. 이미지 태그를 눌러보면, 어떤 레이어로 구성되어 있는지 볼 수 있다.
Docker Image 가져오기
다음 명령어를 통해 Docker Hub에서 이미지를 불러온다. 여기서는 ros:melodic-perception-bionic를 사용해 보자.
# 이미지 불러오기
docker pull ros:melodic-perception-bionic
# 이미지 확인하기
docker images
# 이미지 실행하기(이미지 -> 컨테이너)
# 여기서 it은 실행과 동시에 컨테이너 내부에 접속함을 의미
docker run -it ros:melodic-perception-bionic
# 실행중인 컨테이너 확인하기
docker ps
# 컨테이너 종료하기
docker stop [컨테이너 ID]
# 컨테이너에서 나가기(컨테이너 내부에서)
exit이 상태에서 우리는 ROS Node를 동작시키고 실행할 수 있다. Docker를 사용할 때, 유의할 점은 현재 환경이 저장되지 않는다는 점이다. 현재의 환경을 저장하고 싶으면 commit을 통해 새로운 image로 생성해줘야 지속적으로 사용이 가능하다. 여기서 환경 설정할 것은 다음과 같다.
- Docker 이미지에 모든 ROS 패키지들이 포함된 환경을 구성하기
- 쉽게 실행할 수 있는 Shell Script 작성하기
필요한 환경으로 Docker Image 구성하기
먼저 받은 Docker Image에 나머지 ROS Package들을 설치해서 ROS의 모든 기능을 사용할 수 있는 환경으로 설정한다. melodic-perception-bionic으로 받은 이미지이므로 아래 명령어를 실행하면, 설치되지 않은 남은 패키지들만 설치된다.
# 도커 이미지 구동
docker run -it ros:melodic-perception-bionic
## 컨테이너 내부에서 ROS Package 설치
# APT 패키지 목록 갱신
apt update
# ROS Desktop 설치하기
apt install ros-melodic-desktop-full
# 필요한 기타 Tool 설치하기(사용자마다 다르게!)
apt install net-tools nano vim tree이제 이미지 내부의 사용자 정보를 설정해보자. 먼저, 맥에서 터미널을 하나 더 띄어서 MAC의 사용자 ID(UID)를 확인한 뒤, 동일하게 사용자를 생성해야 Volume Mapping을 했을 때, 정상적으로 접근할 수 있다.
# MAC 터미널에서 사용자 UID 확인
echo $UID나의 경우 501로 확인된다. 대부분의 맥 사용자는 501이며, 우분투는 1000이 기본 사용자 ID로 되어 있을 것이다. 이 이미지에서도 사용자를 생성하면 1000으로 기본 ID가 지정된다. 아래 명령어를 컨테이너 내부 쉘에서 실행하면 된다.
# 사용자 추가하기
# adduser [사용자 이름]
adduser addps5012
# UID 변경하기
usermod -u 501 addps5012
# sudo 권한 부여하기(Editor는 편한걸로 사용!)
nano /etc/sudoers
# 아래 구문을 추가한 뒤, 저장한다.
# [사용자 이름] ALL=(ALL:ALL) ALL
addps5012 ALL=(ALL:ALL) ALL이제 기본적인 이미지 설정은 모두 마쳤으니, 이를 Image로 저장해둬야 한다. 이 작업은 맥의 터미널에서 실행한다. 실행중인 컨테이너의 ID를 확인해서 이를 이미지로 Commit 하면 된다.

# 컨테이너 ID 확인
docker ps
# 컨테이너를 Image로 Commit
# docker commit [컨테이너 ID] [이미지 이름]:[태그]
docker commit 470ac159e037 addps5012/ros:melodic_osx이제 컨테이너를 나가면 모든 사전 환경 설정이 완료된다.
## 컨테이너 내부 쉘의 경우
exit
## 컨테이너 외부 쉘의 경우
# 컨테이너 ID 확인
docker ps
# 컨테이너 종료
# docker stop [컨테이너 ID]
docker stop 470ac159e037XQuartz 설치하기
우리는 앞선 작업에서 Image 설정 작업을 완료했다. 그런데, "컨테이너 내부에서 Rviz나, rqt_graph를 실행하게 되면, 우리가 볼 수 있을까? CLI 환경인데.."
Linux에서는 X11 Forwarding이라는 것이 존재한다. SSH의 연결을 통해, GUI로 구성되는 디스플레이 출력을 전달해주는 기능이다. Ubuntu에서는 X11 Client, Mac에서는 XQuartz, 윈도우에는 XWindows를 사용하면 이 기능을 사용할 수 있다.
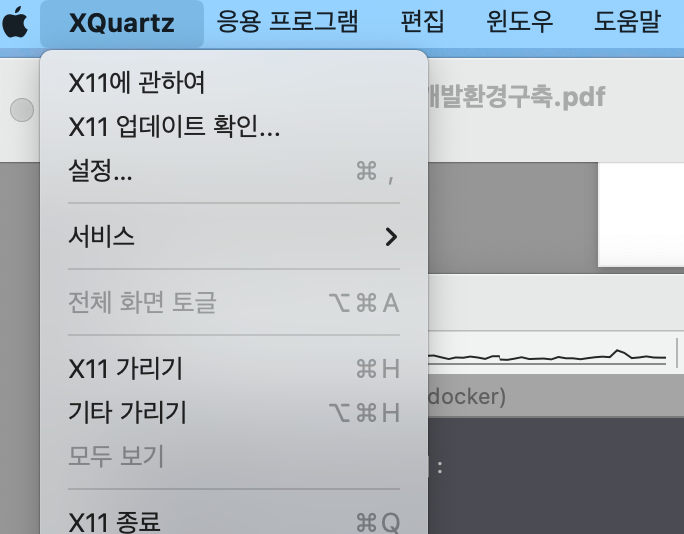
우선, XQuartz 공식 사이트에서 XQuartz를 받아 설치한다. XQuartz를 실행하면, 아무것도 뜨지 않을 수 있는데, 맥 좌측 상단에는 모든 메뉴가 표시된다.
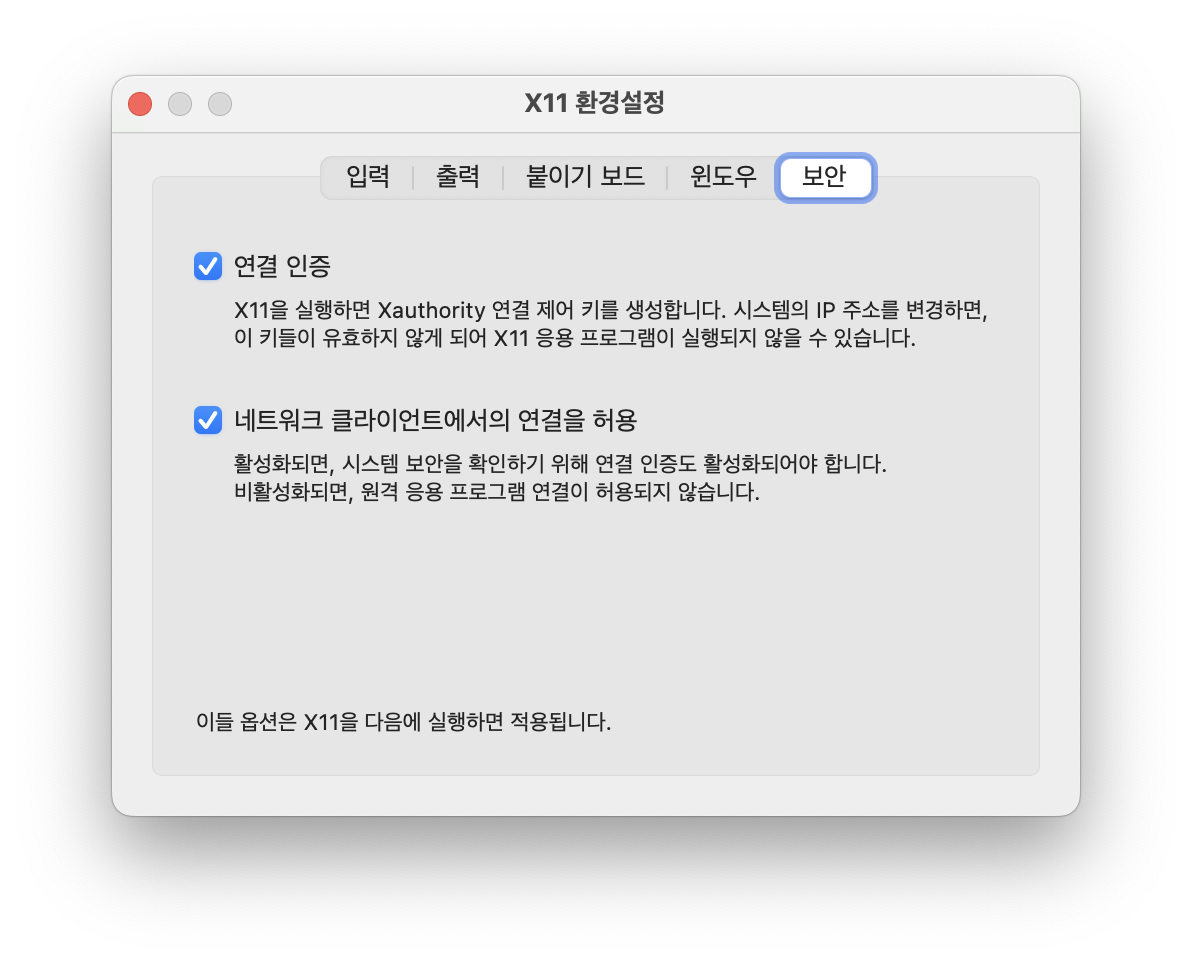
여기서 설정으로 들어간 뒤, 보안 탭에서 네트워크 클라이언트에서의 연결을 허용 항목을 체크해준다.
도커 이미지 쉽게 실행하기
도커 이미지를 실행하는 명령어는 사실 단순하지 않다. 단순히 start, stop, run 명령어를 사용하지만, 여러 옵션을 부여할 수 있다. 매번 실행할 때마다 만들기 쉽지 않기에 나는 shell script 파일을 만든 뒤, 거기에 저장하고 이를 실행한다. 내가 사용하는 run_xycar.sh의 파일이다.
PS_NAME=ros_xycar
xhost +
xhost + ${homename}
export HOSTNAME=`hostname`
docker stop $PS_NAME 2>/dev/null
docker rm $PS_NAME 2>/dev/null
docker run -it --privileged \
--env="QT_X11_NO_MITSHM=1" \
-v /tmp/.X11-unix:/tmp/.X11-unix:ro \
-v /dev:/dev:rw \
-v /Users/addps5012/OneDrive/OneDrive\ -\ koreatech.ac.kr/devOps/docker/xycar_ws:/xycar_ws \
-e DISPLAY=host.docker.internal:0 \
--hostname $(hostname) \
--group-add dialout \
--user addps5012 \
--network host \
--shm-size 4096m \
--name $PS_NAME addps5012/ros:melodic_osx bash위의 내용에 대한 설명은 다음과 같다.
# 해당 프로세스의 이름 지정 -> 전역 변수의 느낌
PS_NAME=ros_xycar
# X11을 사용하기 위한 Mac 터미널의 xhost 지정
xhost +
xhost + ${hostname}
export HOSTNAME=`hostname`
# 기존에 실행중인 이미지가 있다면, 종료하기(중복 실행 오류 방지)
docker stop $PS_NAME 2>/dev/null
docker rm $PS_NAME 2>/dev/null
# 도커 실행하기
docker run \
-it \ // 실행 후 접속
--privileged \ // 자원 권한을 위한 priviliged 모드로 실행
--env="QT_X11_NO_MITSHM=1" \ // X11 관련 설정
-v /tmp/.X11-unix:/tmp/.X11-unix:ro \ // X11 관련 설정 2
-v /dev:/dev:rw \ // 외부 장치(dev mapping)
# Workspace Mapping(매핑 시, 외부에서 파일 접근이 가능)
-v /Users/addps5012/OneDrive/OneDrive\ -\ koreatech.ac.kr/devOps/docker/xycar_ws:/xycar_ws \
-e DISPLAY=host.docker.internal:0 \ // X11 관련 설정
--hostname $(hostname) \ // hostname 지정
--group-add dialout \ // 외부 장치 권한 부여
--user addps5012 \ // 로그인 계정 지정
--network host \ // 네트워크 모드(host)
--shm-size 4096m \ // 메모리(RAM) 가이즈
--name $PS_NAME \ // 컨테이너 별칭 지정
addps5012/ros:melodic_osx bash // 이미지 지정Volume Mapping 기능을 통해 PC의 폴더를 컨테이너 내부의 폴더와 연결할 수 있다. /dev는 리눅스 계열에서 외부 장치를 말하며, Jetson과 같은 하드웨어에서는 센서를 연결하게 되면, 쉽게 접근해 사용할 수 있다.
-it 옵션은 실행 시, 해당 환경으로 접속하는 것을 의미한다. 해당 쉘을 닫을 경우에는, 컨테이너도 같이 종료되는 것에 유의해야 한다. 이를 방지하고 싶으면, -d 옵션을 주면 된다. 이 때에는 쉘을 종료할 때 docker stop을 사용해 종료해줘야 한다. 이렇게 구성한 환경에서는 다음과 같이 실행하면, ROS에 접근할 수 있다.
# Shell Script 실행
sh run_xycar.sh
# 실행중인 컨테이너 접속
# docker exec -it [컨테이너 ID 또는 별칭] [접속 쉘]
docker exec -it ros_xycar bash더불어 Jetson의 제작사인 NVIDIA에서는 딥러닝과 관련된 기능들을 Jetpack으로 제공하고 있다는 특징이 있는데, Jetson-Container라는 도커 이미지를 제공하고 있으므로, 이를 통해 ROS 환경을 설정하면, 온전히 이용할 수 있다. 예전에 ROS2 Humble을 Jetson Nano에서 사용하고자 설정한 이미지는 Docker Hub에 addps5012/ros:humble_nano로 업로드 되어있어 바로 사용할 수 있다.
PS_NAME=ros_humble
xhost +
docker stop $PS_NAME 2>/dev/null
docker rm $PS_NAME 2>/dev/null
cat /proc/device-tree/model > /tmp/nv_jetson_model
docker run -it --privileged \
--runtime nvidia \
--env="QT_X11_NO_MITSHM=1" \
-v /tmp/.X11-unix:/tmp/.X11-unix:ro \
-v /dev:/dev:rw \
-v /home/jetson/Robot_Programming/nanosaur_linetracing:/ws \
-v /tmp/argus_socket:/tmp/argus_socket \
-v /etc/enctune.conf:/etc/enctune.conf \
-v /etc/nv_tegra_release:/etc/nv_tegra_release \
-v /tmp/nv_jetson_model:/tmp/nv_jetson_model \
-e DISPLAY=$DISPLAY \
--hostname $(hostname) \
--group-add dialout \
--user root \
--network host \
--shm-size 4096m \
--name $PS_NAME addps5012/ros:humble_nano bashVSCode 개발환경 구성하기
앞에 지정한대로, Volume Mapping 기능을 사용해 도커 컨테이너 내부에서는 PC에 파일을 읽어서 사용할 수 있도록 구성했다. 따라서, 굳이 vim, nano와 같은 텍스트 에디터 외에도 VSCode나 QT Creator를 사용하면 쉽게 패키지를 사용할 수 있고, 자동완성 기능도 제공한다.
내가 사용하고 있는 ROS에 관련된 VSCode Extension은 다음과 같다.
# 언어 관련 Extension
C/C++
Python
# 빌드 관련 Extension
CMake
CMake Tools
cmake-format
XML Tools
YAML
json
# ROS 관련 Extension
ROS
ROS Snippets
# 기타 Extension
Docker참고로, ROS_MASTER_URI, ROS_HOSTNAME과 같은 전역 환경변수를 설정해야 할 때가 있는데 이 때, .bashrc를 수정했다면, 이미지 commit을 저장해둬야 다음 도커 실행 때에도 동일하게 사용할 수 있다.
📌 해결해야 할 문제
OpenCV에 대한 문제
앞서 말한 것처럼 ROS를 사용해 개발할 때에는 이미지 데이터를 쓸 일이 많이 존재하고, 이미지 데이터를 처리하기 위한 OpenCV를 사용할 일이 많이 있다. OpenCV를 효율적으로 쓰기 위해서는 NPU나 GPU를 사용해야 하지만, 이를 쓰기에는 쉽지 않다. 이에 대한 해결책이 필요하다.
M1 Mac에 OpenCV를 설치할 수 있는데, 이를 Mapping 해보는 방식으로 시도해 볼 예정이다.
OpenGL에 대한 문제
M1 Mac에서는 OpenGL을 지원하지 않기에 Gazebo 시뮬레이터가 실행되지 않는다. 시뮬레이션 환경 구축을 위해서는 이에 대한 해결책이 필요하다.
최근 독립적인 Gazebo는 이를 보완한 버전이 있는거 같다. 이를 활용하는 방법을 시도해 볼 예정이다.
안녕하세요! 제가 Mac mini를 활용해서 ros 환경을 구현하려고 하는데 이 포스팅을 보고 docker환경을 세팅하다가 docker 환경 내로 usb를 통한 device를 연결해줄 수 없다는 얘기를 듣고 vm을 통한 개발로 바꾸었습니다… 혹시 Mac 환경 내에서 docker 안으로 device를 연결해줄수 있는 방법이 있나요???