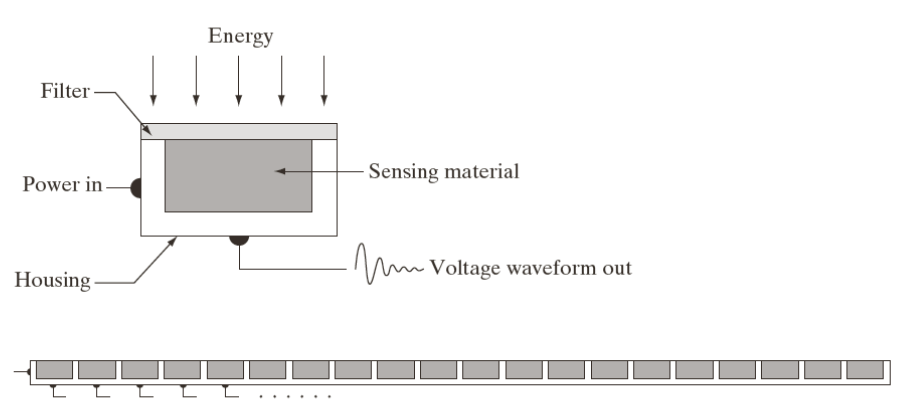
image sensing and acquisition
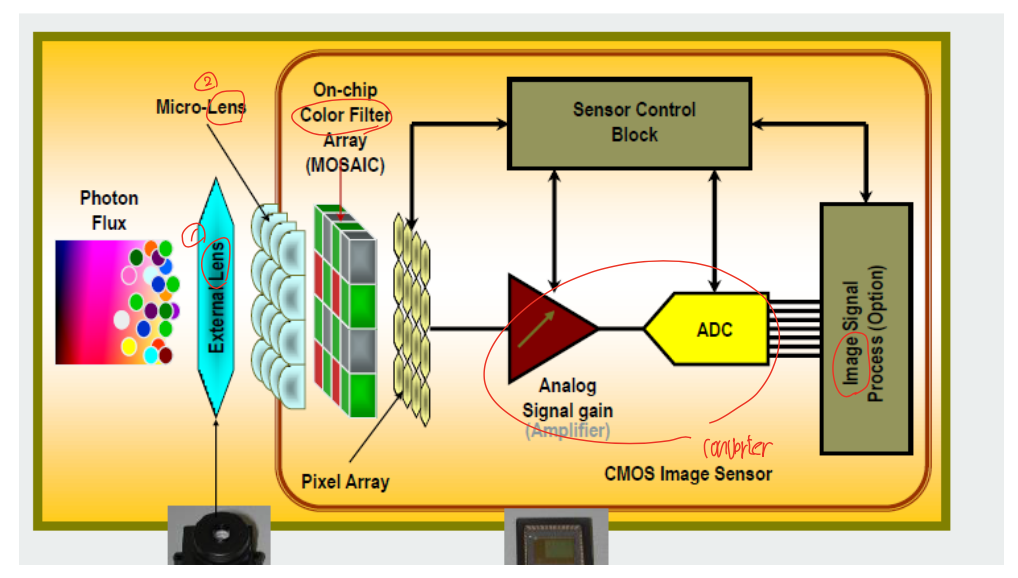
- image formation model
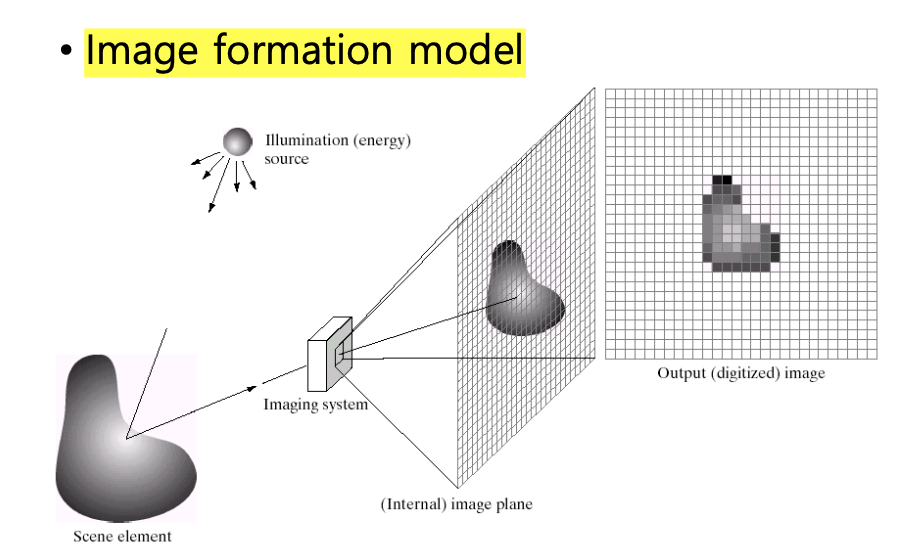
- imaging system
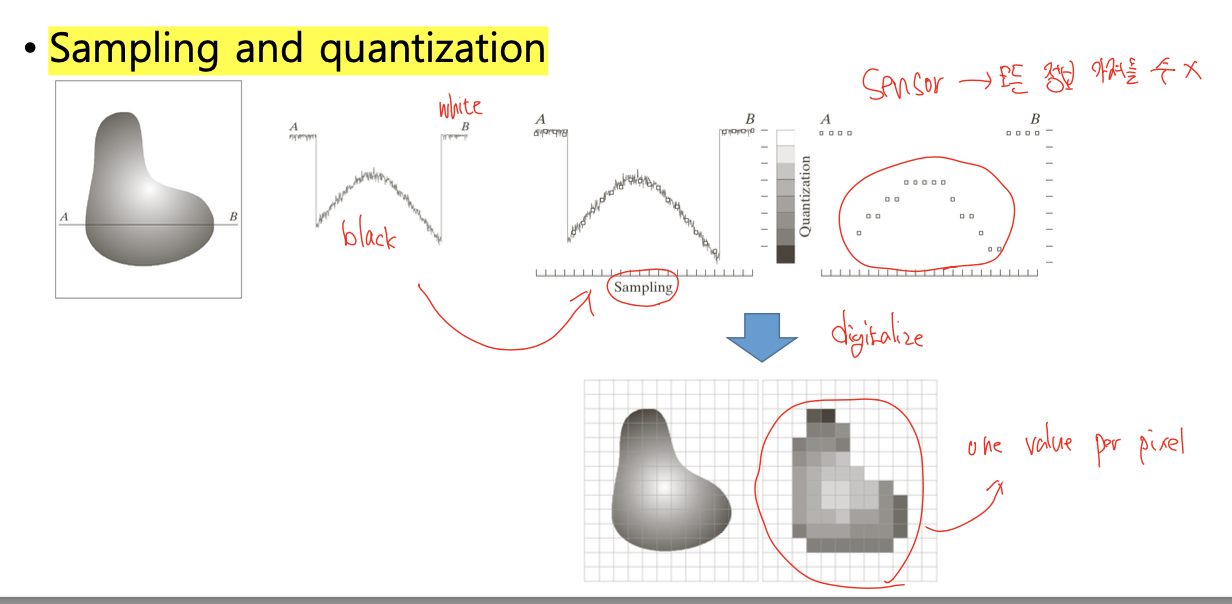
- sampling and quantization
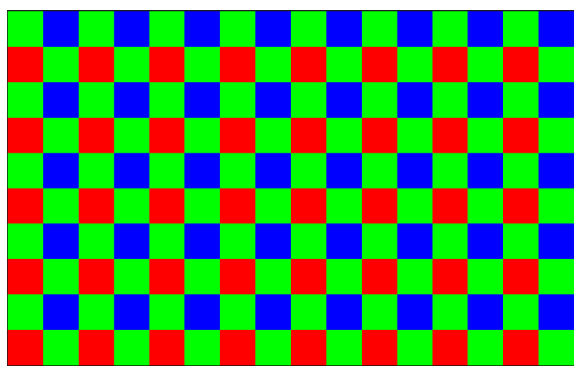
- bayer pattern
- 사람은 녹색에 가장 예민함
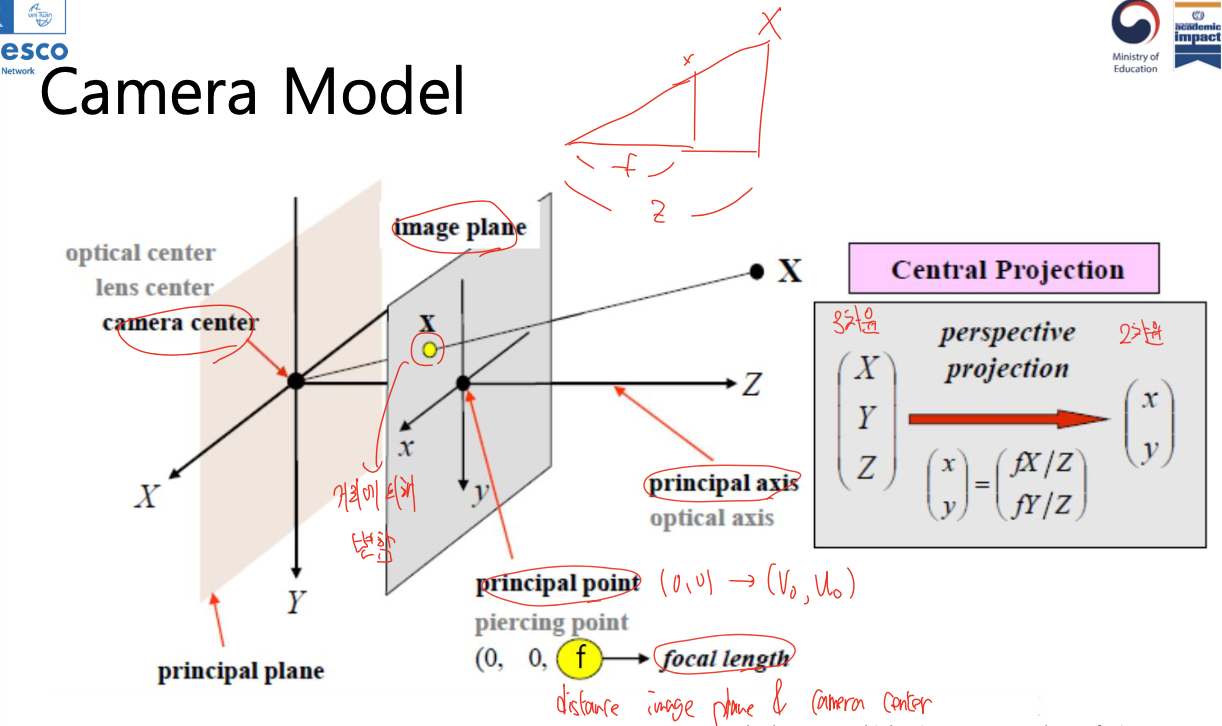
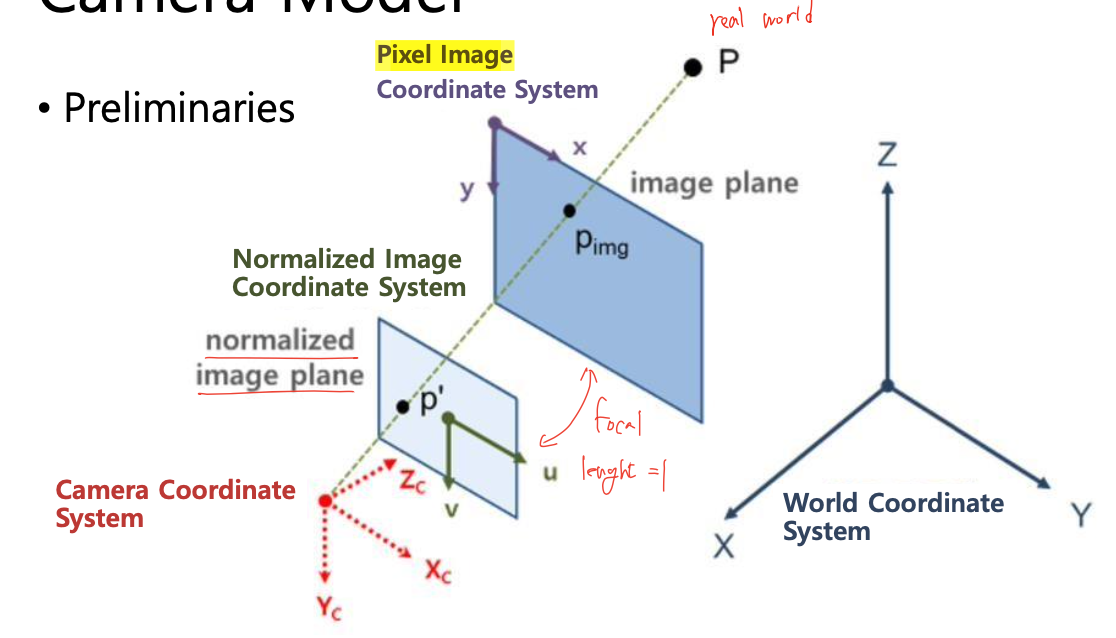
camera model
- 정의: 카메라는 3차원 장면 --> 2차원 2좌표로 변환
- 용어
- World coordinate(3D)
- 원점: 실제세계의 (0,0,0)
- Camera coordinate(3D)
- 원점: 카메라 관점의 원점 좌표(실세계 원점이랑 다를 수 있음)
- Pixel coordinate(=image plane)
- Normalized image plane
- 초점으로부터 focal length 1인 평면
- Inhomogeneous coordinates
- 2D point➔(x,y) 3D point➔(x,y,z)
- Homogeneous coordinates
1. 2D point➔(x,y,1) 3D point➔(x,y,z,1)
2. (x,y,z,1)= (2x,2y,2z,2) <-- 같음(마지막 패러미터로 나머지 원소 나눌 수 있음)
3. (x,y,0) --> 무한대 점 표현 가능
- 카메라 모델