AUTOSAR의 주요 목표:
ECU 개발의 표준화 및 효율성 향상
주요 활용:
ECU 소프트웨어 설계, 개발 통합
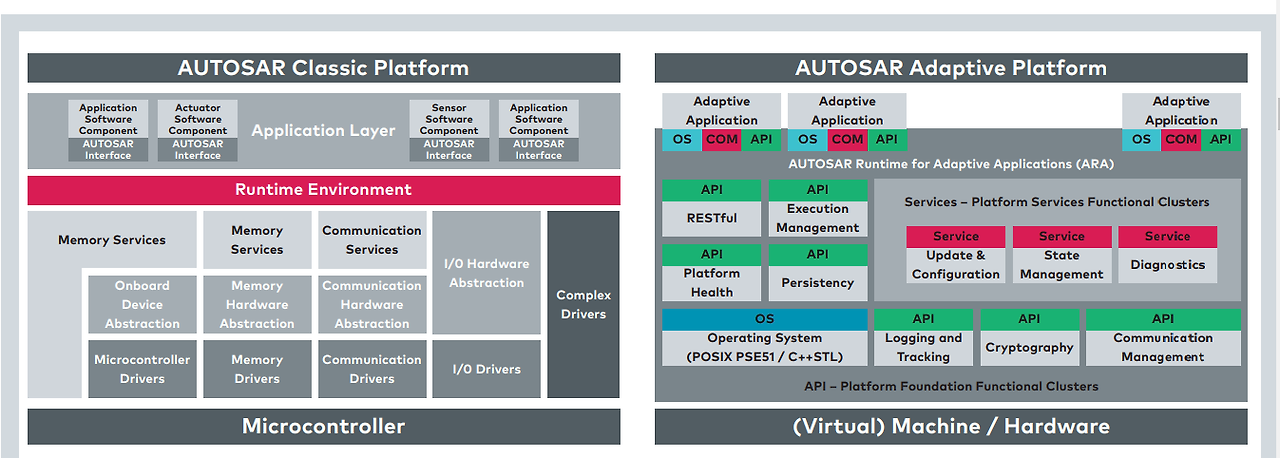
AUTOSAR는 크게 Classic Platform과 Adaptive Platform으로 나뉜다.
1. Classic Platform
ECU의 실시간 제어 소프트웨어를 위한 플랫폼으로, 전통적인 자동차 기능(엔진, 브레이크, 배터리 관리 등) 개발하는데 적합.
Classic Platform의 구조
1. Basic Software (BSW)
- ECU의 하드웨어와 소프트웨어 간 인터페이스 제공.
- 예) 메모리 관리, 통신(CAN, LIN, Ethernet 등), 디바이스 드라이버
- Runtime Environment (RTE)
- 애플리케이션 소프트웨어와 Basic Software 간의 데이터 교환 지원.
- ECU 간 통신과 내부 통신 모두 처리
- Application Software Components
- 특정 차량 기능(엔진 제어, 브레이크 제어 등)을 수행하는 모듈
- 예) BMS 소프트웨어, ABS 제어 소프트웨어
2. Adaptive Platform
고성능 컴퓨팅을 요구하는 최신 애플리케이션(예: 자율주행, V2X 통신)을 위한 플랫폼
- 주로 Linux, POSIX 기반 OS와 같은 비실시간 운영체제와 호환
- 클라우드 통신, OTA(Over-The-Air) 업데이트, 머신 러닝 등 지원
AUTOSAR 기반 ECU 개발 과정
- 요구사항 분석
- 차량의 기능 요구사항 정의(예: ABS 제어, 배터리 관리)
- 소프트웨어 설계
- Classic/Adaptive Platform 선택
- 소프트웨어 계층 설계 및 모듈 분리
- Basic Software 설정
- 하드웨어 추상화 계층 및 통신 설정
- 예: CAN 통신, 메모리 관리 모듈 구성
- RTE 구성
- 애플리케이션과 Basic Software 간 데이터 교환 인터페이스 설계
- 소프트웨어 구현
- 제어 알고리즘 작성 및 통합
- 예: ABS 제동 로직, BMS 충전/방전 제어 로직
- 테스트 및 검증
- SILS/HILS
- AUTOSAR 표준에 따라 테스트 케이스 설계 및 실행
- ECU 통합 및 최적화
- 소프트웨어를 하드웨어에 이식하고 ECU간 통신 및 동작 테스트 수행
참고: https://blog.naver.com/suresofttech/221191321271
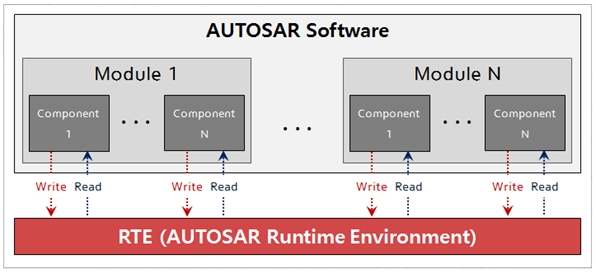
- RTE란?
하나의 컴포넌트는 다른 모듈 혹은 컴포넌트와 직접적으로 통신하는 것이 아니라 오로지 RTE로만 데이터를 넘기고 RTE로부터만 데이터를 받습니다.
RTE(AUTOSAR Runtime Environment)는 컴포넌트 사이 혹은 그 외의 AUTOSAR 영역 사이에 통신 기능을 담당하면서 AUTOSAR 표준 인터페이스를 제공하는 계층으로 전달받은 데이터를 가지고 있다가 해당 데이터를 필요로 하는 모듈이 있다면 이를 전달해 준다.
