자동차
1.용어 정리

SDLC (Software Development Life Cycle) 소프트웨어 개발 주명 수기. 6단계(요구정의, 분석, 설계, 구현, 시험, 유지보수)계획하고, 만들어서 테스트하고 배포하는 일련의 과정.Requirements -> Design Software Sol
2.V-Cycle 이란
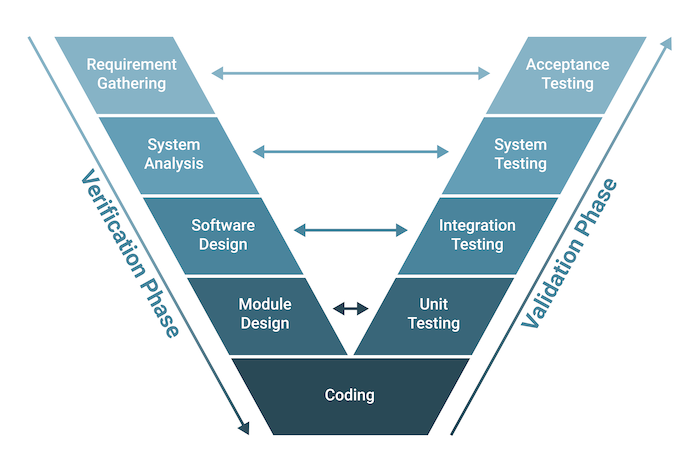
V-Cycle의 왼쪽은 시스템 요구사항 분석에서 시작하여 상세 설계로 내려가는 단계들을 나타내고, 오른쪽은 구현된 시스템의 테스트와 검증 과정을 나타낸다.Verification Phase / Validation Phase요구사항 명세:목표) 고객 및 사용자 요구사항을
3.BMS
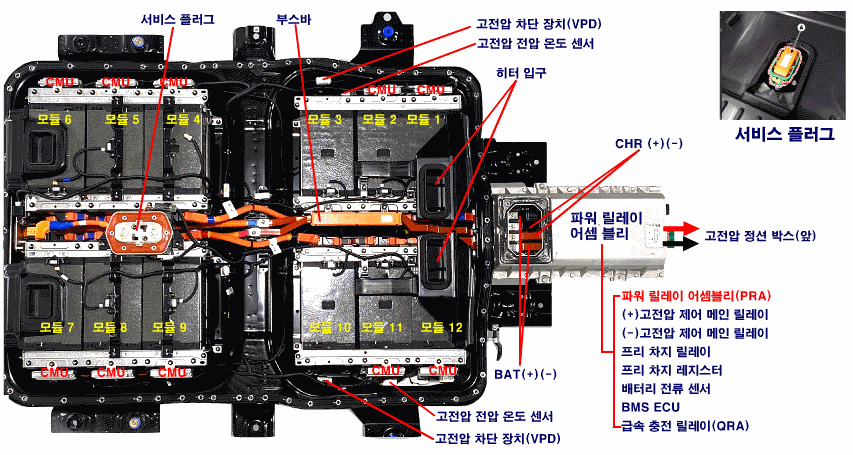
https://m.blog.naver.com/suresofttech/221876357090BMS는 배터리를 제어하는 말 그대로 Battery Management System이다.맥북도 보면 효율화 된 충전 기능이라고 해서 방전이나 과충전을 막아주는 것처럼BMS
4.DTC
DTC(Diagnostic Trouble Code): 차량의 전자 제어 장치(ECU)에서 오류를 진단하고 보고하는 표준화된 코드.DTC는 ISO 14229(UDS) 또는 SAE J2012 규격을 따르며, 일반적으로 4바이트(32비트)로 구성된다.: 발생한 오류의 유형,
5.BMS TSW 개발이란
BMS(Battery Management System)의 주요 기능배터리 상태 모니터링 (SOC, SOH, 온도, 전압, 전류 등)충전/방전 제어배터리 보호 (과충전, 과방전, 과온 방지)시스템 진단 및 오류 관리TSW(Test Software)는 BMS와 같은 임베디
6.HCU VCU
HCU, VCU 등등..VCU는 전체 차량 HCU는 그중에서도 하이브리드 시스템에 집중.하이브리드 차량의 동력 시스템을 제어하는 전용 유닛.내연기관(ICE)과 전기모터의 협력을 조정해 연비와 성능 극대화.예)주행 상황(가속, 정지, 평지 주행 등)에 따라 내연기관과 전
7.AUTOSAR
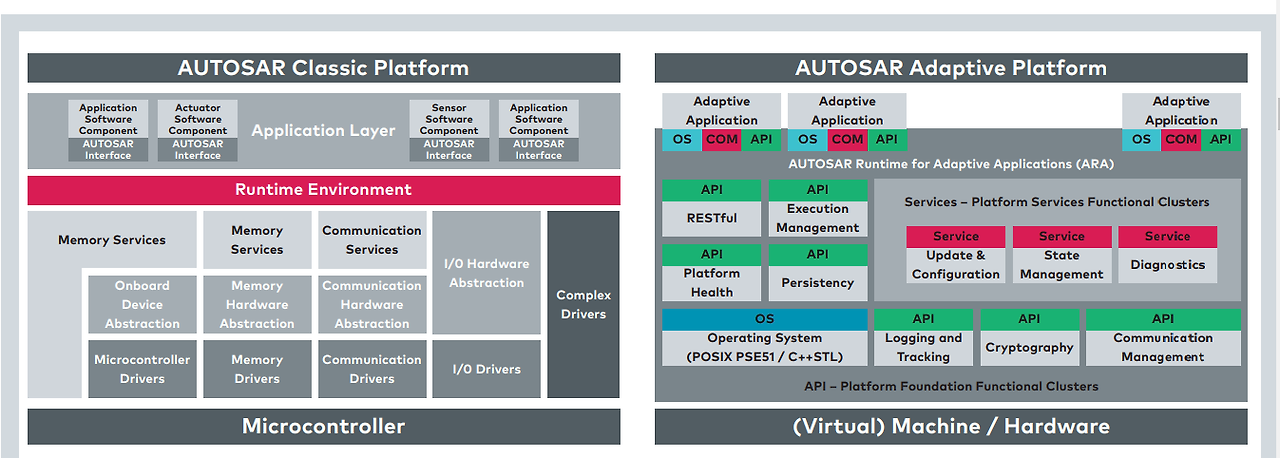
AUTOSAR의 주요 목표: ECU 개발의 표준화 및 효율성 향상주요 활용:ECU 소프트웨어 설계, 개발 통합AUTOSAR는 크게 Classic Platform과 Adaptive Platform으로 나뉜다.ECU의 실시간 제어 소프트웨어를 위한 플랫폼으로, 전통적인 자
8.VCU, VPC

VCU는 자율주행을 위한 차량 내 ECU 및 각종 장치들을 제어하는 차량제어 장치로 상위 제어기인 자율주행제어로부터 CAN 통신을 통해 제어 명령을 받아 차량 내 장치들을 제어하는 Unit.출처: https://www.eraeams.com/product/sub
9.ISO26262(기능 안전) 인증을 받기 위해선..
VPC 제어기에 대한 Automotive Safety Integrity Level (ASIL) 결정ISO 26262의 Part 3와 Part 4에 따라 기능안전 요구사항을 정의ISO 26262는 코드 커버리지의 최소 요구사항으로 MC/DC (Modified Condit
10.AUTOSAR 플랫폼.. 아키텍처

함수 등 API들을 정의해놓은 것. 전장 소프트웨어 개발 시 그냥 가져다가 개발할 수 있도록 해두었다.AUTOSAR SPEC에 기술되어 있다.Application -> RTE -> BSW -> HardwareASW (Application Software)SWC(Soft
11.AUTOSAR 공부
AUTOSAR란 자동차 업계에서 사용되는 표준화 된 SW 아키텍쳐. AUTOSAR는 단순히 구조만 표준화한 게 아니라 SW 개발하는 일련의 절차를 표준화하였고 그 절차에 따라 SW를 개발해야 한다. AUTOSAR 개발 시 별도의 툴 사용이 필수인데 크게 Author