오늘 한 일
- 팀 프로젝트 기획 후 진행
- AI 내비게이터 배우기
AI 내비게이터
개념
유니티의 기능 AI 길찾기 기능 중 하나로 런타임 이전에 이동 가능한 영역을 지정하고, Nav Mesh Agent 컴포넌트를 활용하여 해당 AI에게 길찾기 능력을 부여해주는 기능이다.
특징
Navigation Mesh (네비게이션 매쉬)
- 3D 공간을 그리드로 나누어 이동 가능한 영역과 불가능한 영역을 구분하는 매쉬입니다.
캐릭터는 이 영역을 기반으로 경로를 계산해서 이동합니다.
- 하나는 움직이지 않는 지형을 위한 영역 지정이고 또 다른 하나는 움직이는 오브젝트를 위한 영역 지정이다.
Pathfinding(경로 탐색)
- 캐릭터의 현재 위치에서 목표 지점까지 가장 적절한 경로를 찾는 알고리즘입니다.
- 주로 A* 알고리즘 등이 사용되며, 지정된 목표 위치까지 최단 경로를 탐색합니다.
Steering Behavior (스티어링 동작)
- 캐릭터나 NPC가 경로를 따라 이동할 때보다 자연스러운 동작을 구현하는데 사용됩니다.
- 동적으로 캐릭터의 이동 방향과 속력을 조정하여 부드럽고 현실적인 이동을 시뮬레이션 합니다.
Obstacle Avoidance (장애물 피하기)
- 캐릭터가 이동 중에 장애물과 충돌하지 않도록 하는 기술입니다.
각종 센서나 알고리즘을 사용하여 장애물을 감지하고 피하는 동작을 수행합니다.
Local Avoidance (근접 회피)
- 여러 캐릭터나 NPC가 서로 충돌하지 않도록 하는 기술입니다.
캐릭터들 사이의 거리를 유지하거나 회피 동작을 수행하여 서로 부딪히지 않도록 합니다.
사용하는 방법
NavMesh 영역 정하기
1. 내비게이션 (Obsolete)
들어가기 전에 기초 설명
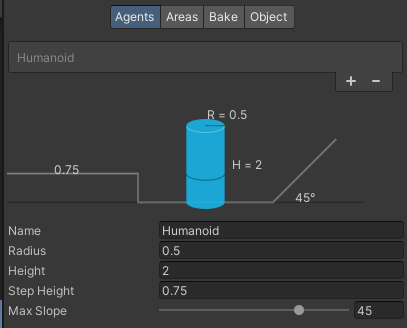
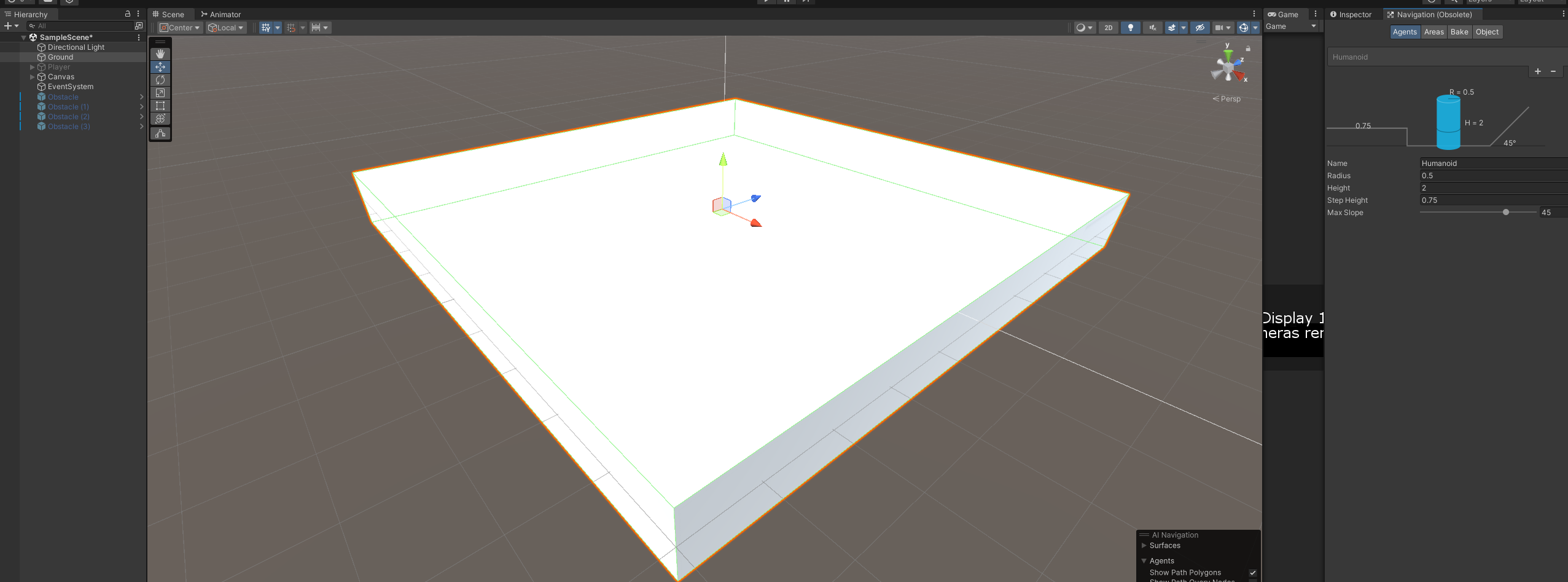
Agents
- 길 찾기를 수행할 Agent들의 Obstacle Avoidance를 설정하고 모으는 리스트이다.
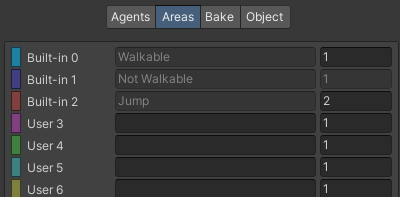
Areas
- 각 영역의 가중치 값을 정하는데 사용하는 항목이다.
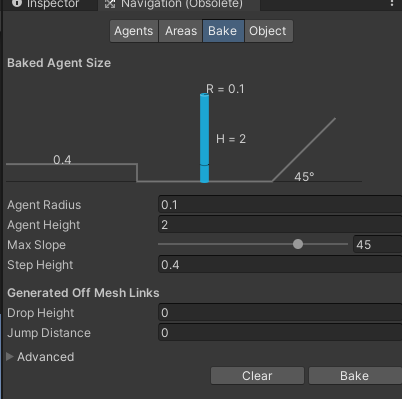
Bake
- 모든 기초 설정이 완료되었다면, Bake를 하여 Agents들의 이동 영역을 산출해준다.
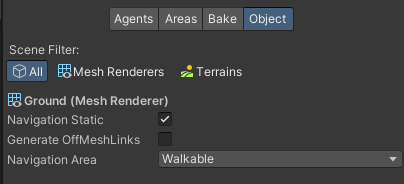
Object
- 선택한 오브젝트들에게 Area를 부여해주는 곳이다
- Navigation Static을 선택해주지 않으면, 해당 오브젝트에게서 이동 영역을 산출해줄 수 없다.
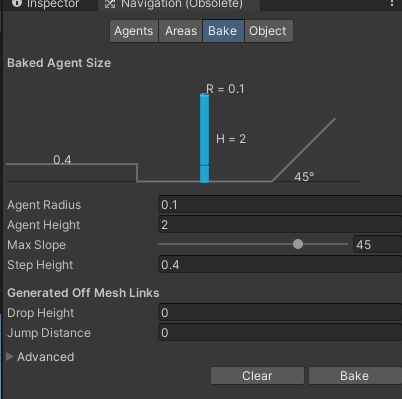
이동 가능 영역 Bake하기
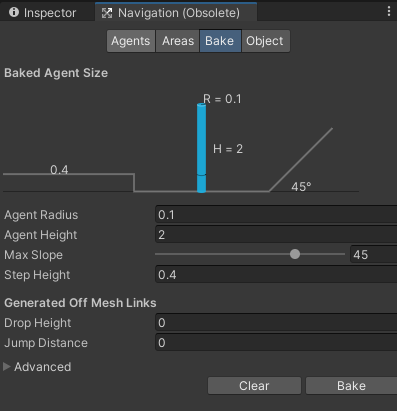
- 내비게이션(Obsolete) 창 열기
- Object를 선택하고 Inspector창에 있는 Navigation (Obsolete) 창을 선택한다.
- Bake를 하기 전에 Static을 활성화하고, 원하는 Area를 설정한다.
- 산출하고자 하는 오브젝트들에게 Object 설정을 해줬다면 Bake를 해주자
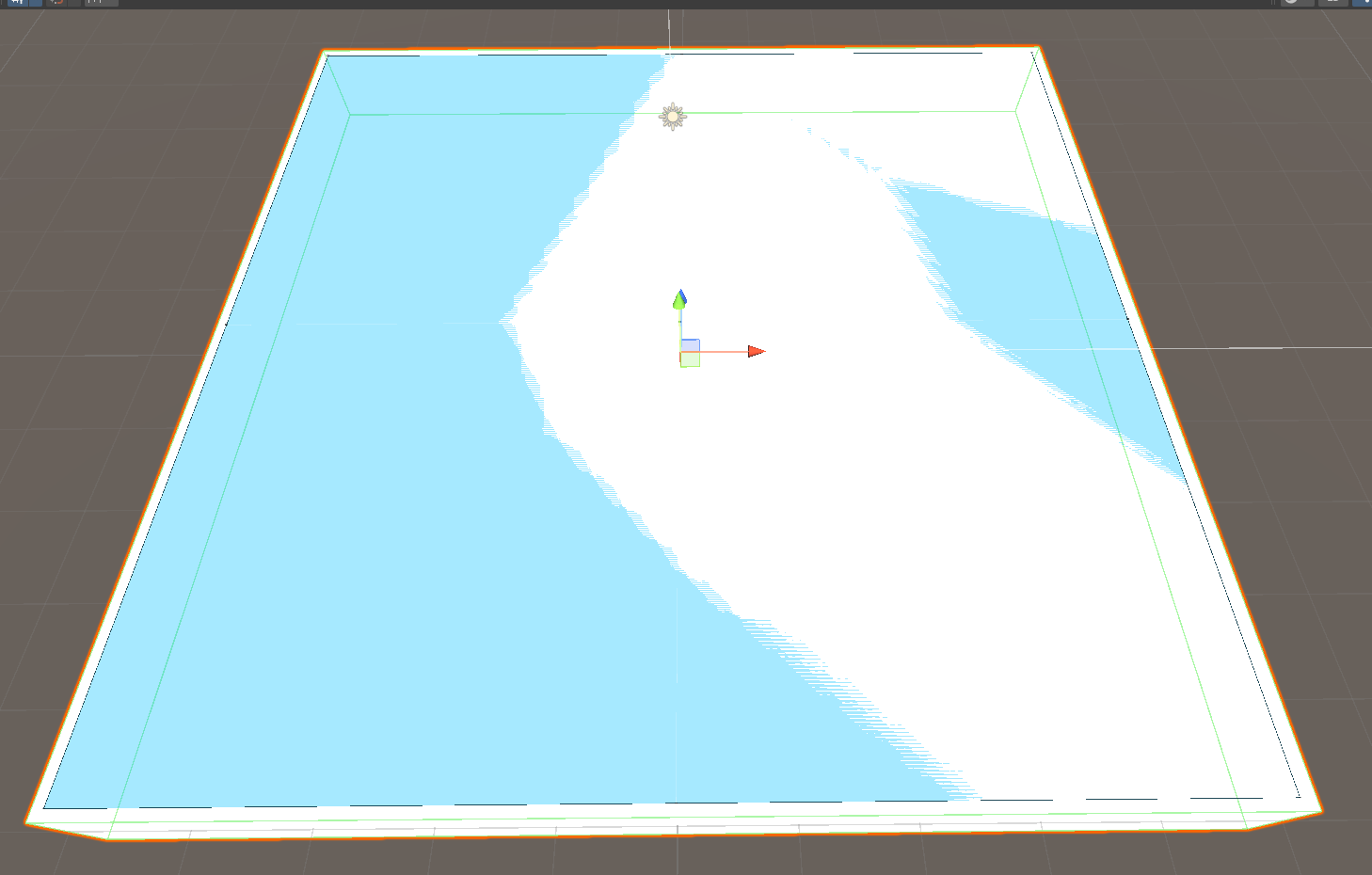
- 필자는 이동영역이 붕뜨는 것을 방지하기 위해서 Radius를 0.1로 설정하고 Bake한다.
- 아래와 같이 보이긴한데 흐릿하게 보인다면 잘 산출된 것이다.

NavMeshAgent로 영역 통한 이동 구현하기
이제 이동 영역을 정했으니 이동 영역을 사용하는 동물을 만들어보자
NavMeshAgent 컴포넌트
- AI Navigation을 활용한 캐릭터의 이동을 위해서는 들어가야하는 컴포넌트로 오브젝트의 자연스러운 이동이나 장애물 피하기 경로 찾기 설정들을 할 수 있다.
- 원하는 오브젝트에다가 위 컴포넌트를 추가시키자!
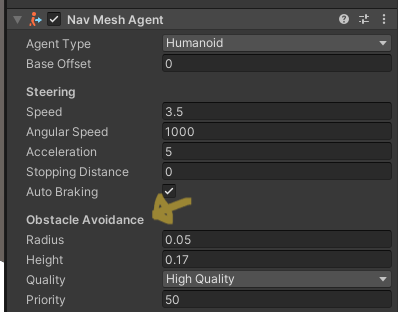
각종 설정
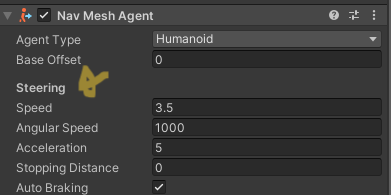
Steering
- Speed 최대 이동 속도(초당 월드 단위로)
- Angular Speed 최대 회전 속도(초당 각도)
- Acceleration 최대 가속(제곱 초당 월드 단위로)
- Stopping distance 에이전트는 목표 위치에 가까워졌을 시 정지합니다.
- Auto Braking 활성화 시 에이전트는 목적지에 다다를 때 속도를 줄입니다.
에이전트가 멀티플 포인트 사이에서 부드럽게 움직여야 하는 순찰과 같은 동작을 할 때에는 반드시 비활성화 시켜야 합니다.Obstacle Avoidance
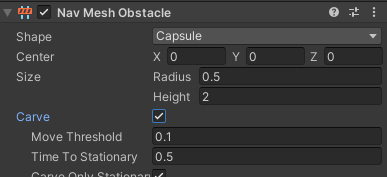
Radius 에이전트의 반경은 장애물과 다른 에이전트 간의 충돌 계산하기 위해 사용됩니다.
Height 에이전트가 장애물 밑으로 지나갈 수 있는 높이 간격입니다.
Quality 장애물 회피 품질입니다. 에이전트의 수가 많다면 장애물 회피 품질을 줄임으로써 CPU 시간을 절약할 수 있습니다. 회피를 없음으로 설정할 경우 충돌만 해결할 수 있을 뿐 다른 에이전트와 장애물에 대한 적극적인 회피는 하지 않습니다.
Priority 낮은 우선 순위의 에이전트는 이 에이전트의 회피 대상에서 제외됩니다.
값은 0에서 99사이에서 설정되어야 하며 낮은 숫자가 높은 우선 순위임을 의미합니다.
필요한 기초 코드
// 네임스페이스 using UnityEngine.AI; // 컴포넌트 가져오기 NavMeshAgent agent; void Awake() { agent = GetComponent<NavMeshAgent>(); }
기초적으로 사용하게될 각종 NavMeshAgent의 멤버들
프로퍼티
- isStopped: NavMesh 에이전트가 현재 경로를 따라 이동을 중지하거나 계속하는지를 설정하거나 가져옵니다.
( 해당 설정을 활성화 시에는 NavMeshAgent를 이용한 움직임이 정지됩니다.)- remainingDistance: 에이전트의 위치와 현재 경로의 목적지 사이의 거리를 나타냅니다.
메서드
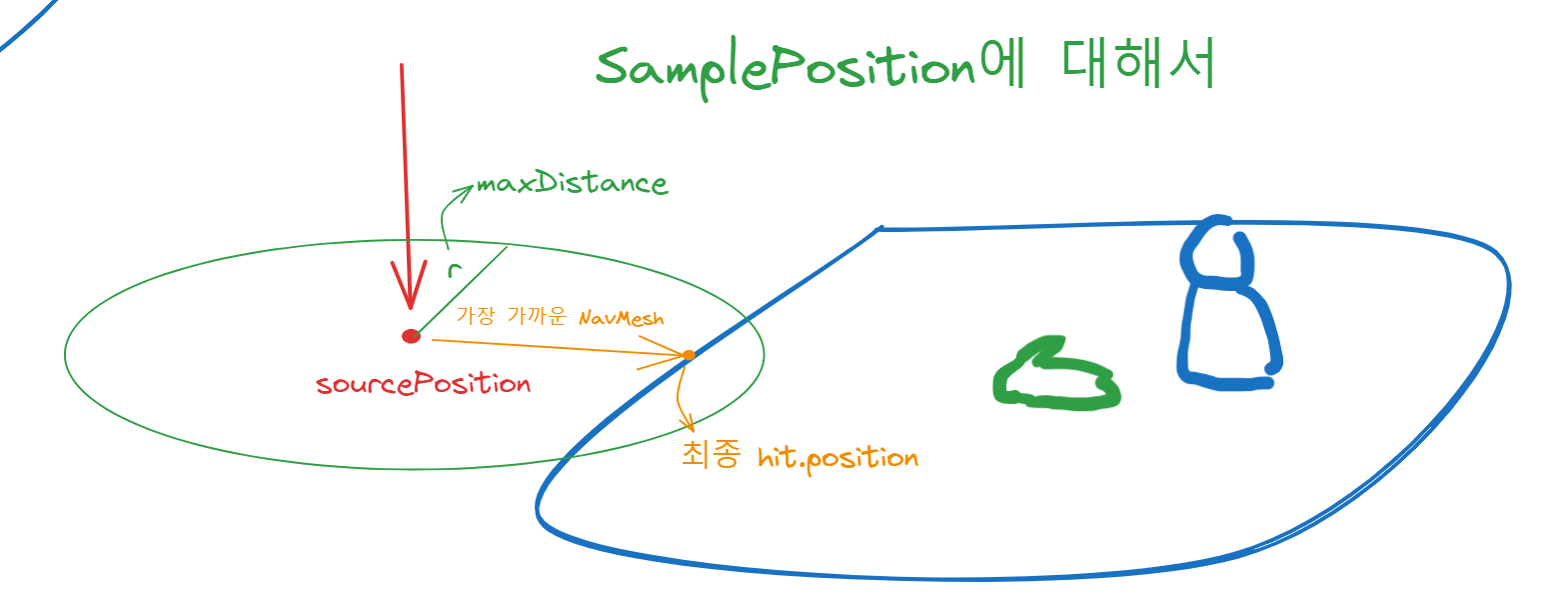
- bool SamplePosition(Vector3 sourcePosition, out AI.NavMeshHit hit, float maxDistance, int areaMask)
(NavMesh) sourcePosition으로부터 지정된 maxDistance 내에서 가장 가까운 NavMesh의 지점을 찾습니다.- bool SetDestination(Vector3 target)
목적지를 설정하거나 업데이트하여 새 경로에 대한 계산을 트리거합니다.추가적인 설명
- NavMeshHit
-> NavMesh 쿼리에 대한 결과 정보가 담겨져있다.
프로퍼티 : distance, hit, mask, normal, position
배회하는 코드
void Update() { // 플레이어 감지 playerDistance = (transform.position - CharacterManager.Instance.Player.transform.position).sqrMagnitude; // sqr을 활용했으니 제곱하는 걸 잊지 맙시다. WanderingState(); } void WanderingState() { if (agent.remainingDistance < 0.1f) { NewWanderingPoint(); } } private void NewWanderingPoint() { NavMesh.SamplePosition(transform.position + (Random.onUnitSphere * detectDistance), out NavMeshHit hit, detectDistance, NavMesh.AllAreas); agent.SetDestination(hit.position); }
- 위 코드는 목표에 도착하면 주기적으로 목적지를 계속 바꾸는 코드이다.
적용 결과
- 자신의 주위로 계속해서 배회한다. (detectDistance를 1로 설정해두었다.)
각종 코드 주의 사항
- SetDestination을 사용할 때 곧바로 Vector3를 넣으면 의도된대로 작동이 안될 수도 있다.
-> Navmesh를 벗어난 목적지로 설정해버릴 경우 그대로 자리에서 멈춰버린다.- SamplePosition은 랜덤으로 정하는 게 아니라 받은 sourceposition값에서 가장 가까운 NavMesh를 찾는 역할을 하는 것이다.
- SamplePosition은 위와 같은 과정으로 포지션 값을 뽑는 것이고, 만약에 적절한 NavMesh 값을 찾지 못하면 false를 반환한다.

참고 자료
유니티
NavMeshAgent
NavMeshAgent의 멤버
영상
[유니티] 클릭 이동 구현하기 | Navigation(NavMesh) - 오늘코딩

게임 개발 꿈나무