요약
- degradation 문제에 대한 해결책을 제시하였다.
- 이전 모델(eg. vgg) 보다 성능이 좋고 파리미터 수도 적음, 시간(FLops)도 빠름
- 아직까지도 backbone(feature 뽑기) 네트워크로 많이 쓰이고 있다. (Sota)
- vision transformer(ViT)
degradation 문제
- 네트워크의 깊이는 모델의 정확도를 높이는데 매우 중요
- 그치만 단순히 깊이만 쌓는다고 해서 능사인가? No
- 네트워크가 깊으면 발생하는 문제:
- vanishing/exploding gradients -> normalized initialization or intermediate normalization으로 어느 정도 해결
- degradation problem: 깊이가 깊을수록 overfitting 이외의 학습 장애가 생김(깊을수록 training과 testing error가 둘 다 커진다), accuracy saturates
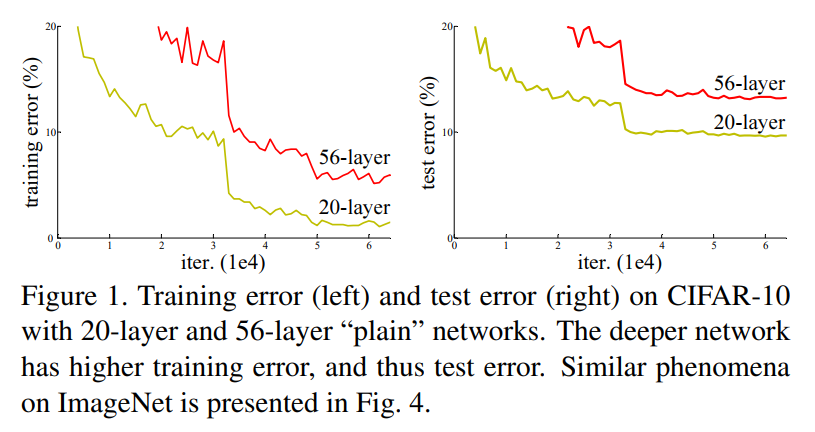
- degradation -> deep residual network (얕은 모델의 오차와 거기에 층을 추가한 깊은 모델의 오차가 크지 않도록)
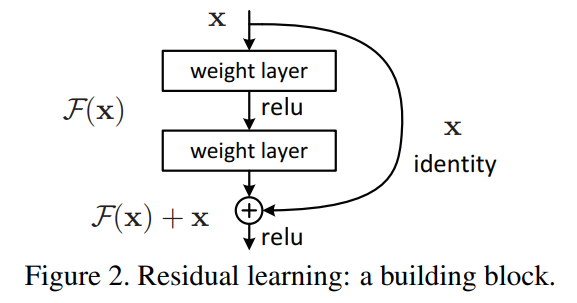
- residual mapping: 네트워크가 타깃 값이 아닌, 타깃 값에서 입력값을 뺀 잔해를 학습하도록 한다.
- = input, = desired mapping
- ( ->residual mapping) 이 값을 학습한 후 x를 더해서 기존 타깃 값 생성
- 이렇게 하는 것이 더 성능이 좋을 것이다. -> 만약 identity mapping이 최적의 값을 도출한다면, residual을 0으로 만드는 것이 비선형 구조에서 identity를 만드는 것보다 쉬울 것.
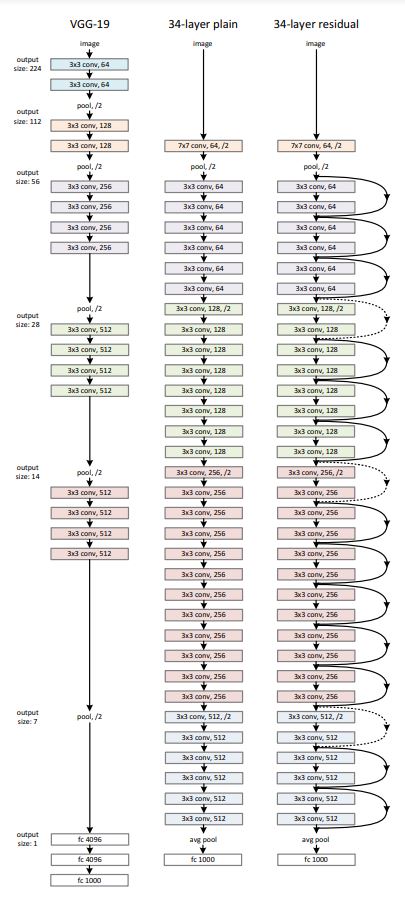
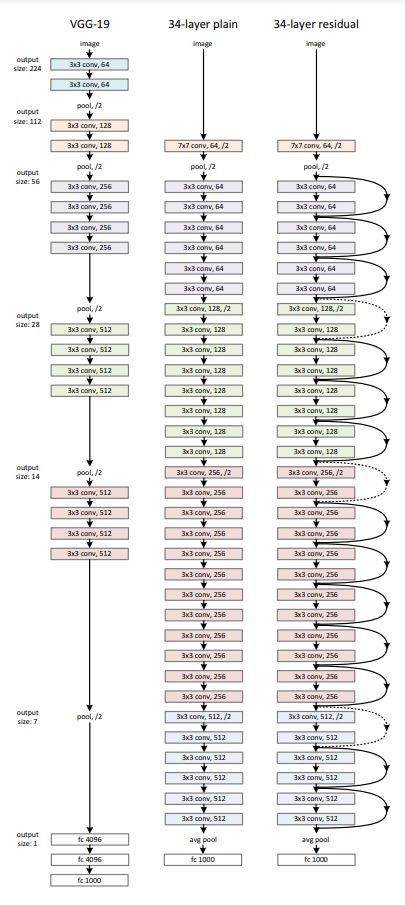
ResNet 구조
-
Residual Learning
- 앞서 설명한 residual mapping을 통해 residue를 학습
- training error를 줄일 수 있을 것이다. -> identity mapping으로 된 레이어가 추가된다면, 더 큰 모델의 오차는 추가되기 전 모델의 오차와 다를 것이 없다. 학습하다 필요 없는 레이어(identity가 optimal한 경우) weight를 0으로 하면 된다(0 + x = x).
- 단순하게 생각하면, 본 값을 학습하는 것보다 차이를 학습하는 것이 더 빠를 것이다.
-
Identity Mapping by Shortcuts
- identity mapping: element-wise addition
- projection shortcuts:
- identity mapping: element-wise addition
-
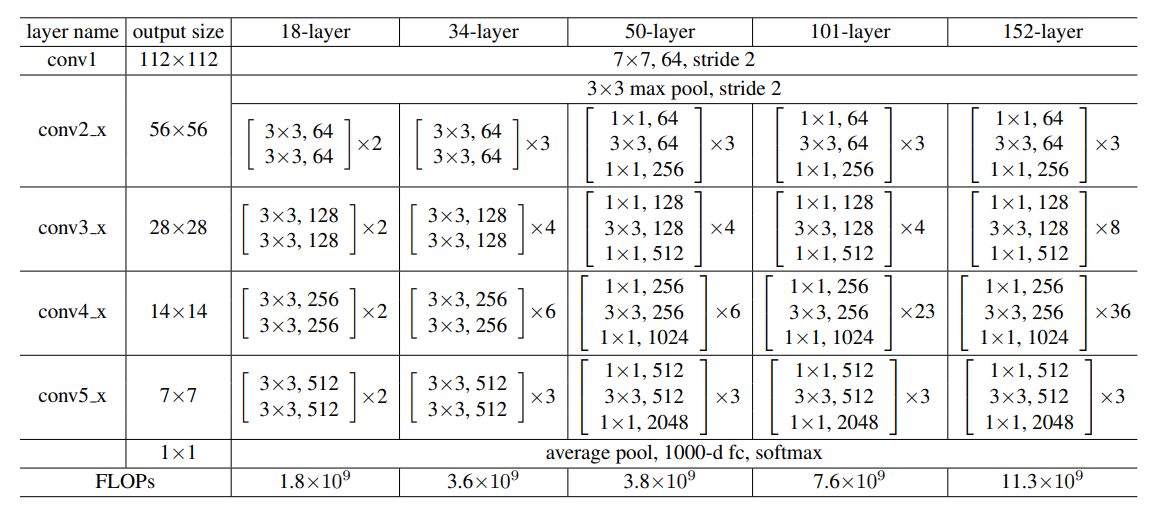
Network Architectures
- plain network: VGG와 비슷한 구조. feature map이 /2로 downsample 시 필터 수 2배로, 아닌 경우 동일하게 유지. 마지막에 GAP(global average pooling) + 1000-way fc layer with softmax
- residual network: plain network + shortcut connections.
- 채널 수가 같은 경우 단순히 더한다(identity shortcuts).
- 더 큰 경우(2배):
(1) identity mapping with zero padding
(2) projection shortcut with 1x1 convolution to match dimensions -> new parameters to learn
=> 둘 다 stride 2로 downsample
-
Implementation
- conv + BN(Batch Normalization) + activation(ReLU)
Codes
-작성중-

🥔