개요
- First Principles of Computer Vision 스터디 정리용 글
- ECCV Rebuttal과 Neurips 때문에 2주 쉬고 다시 시작
- 4주차는 Edge Detection과 Boundary Detection을 들음
Edge Detection
Overview
- Video Link
- Topics
- What is Edge? 정의, 좋은 edge detector는 어때야하는가?
- Edge Detection Using Gradients
- Edge Detection Using Laplacian
- Canny Edge Detector (hybrid!)
- Corner Detection, 두 엣지가 만나는 곳은?, Harris Corner Detector
What is Edge?
- Video Link
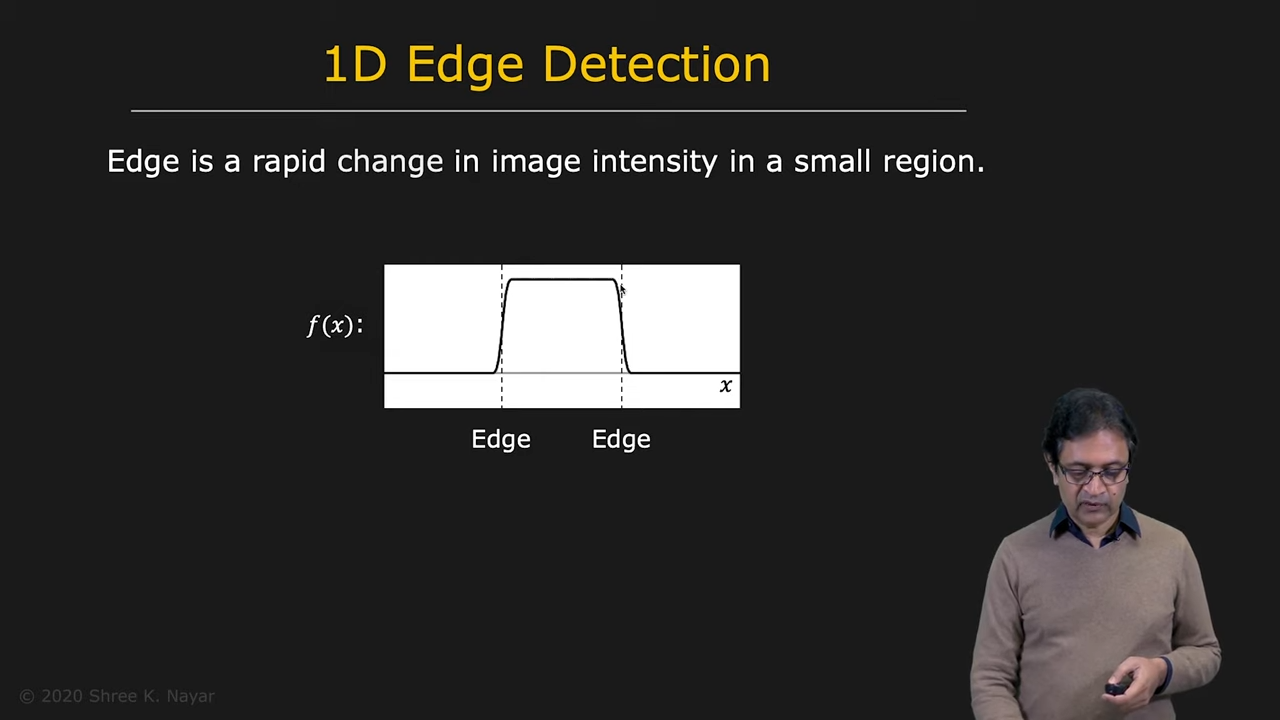
- navie하게 정의해보면 image intensity(brightness)의 좁은 영역에서의 급격한 변화
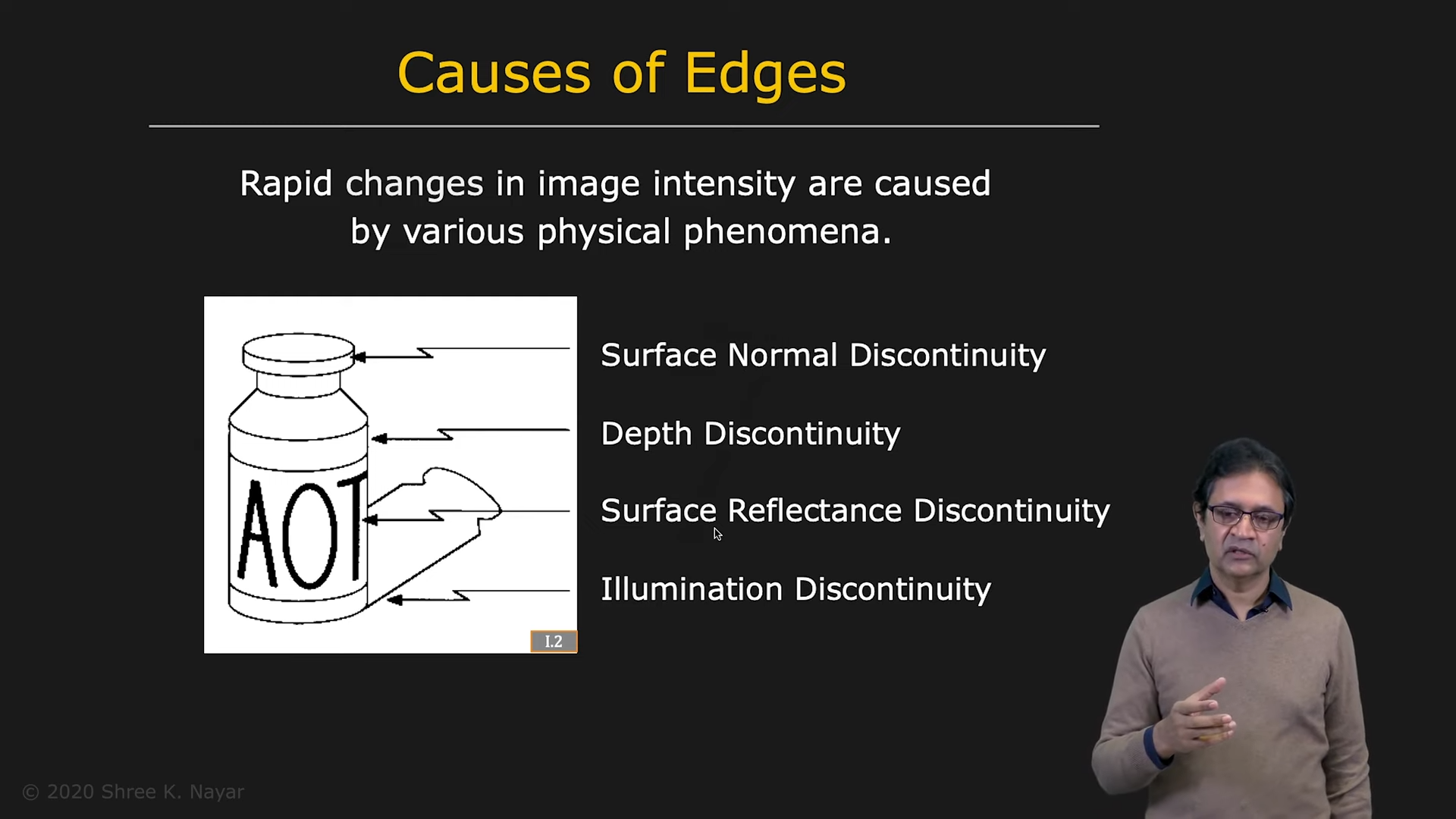
- edge의 원인들
- surface normal discontinuity
- depth discontinuity
- surface reflectance discontinuity
- illumination discontinuity
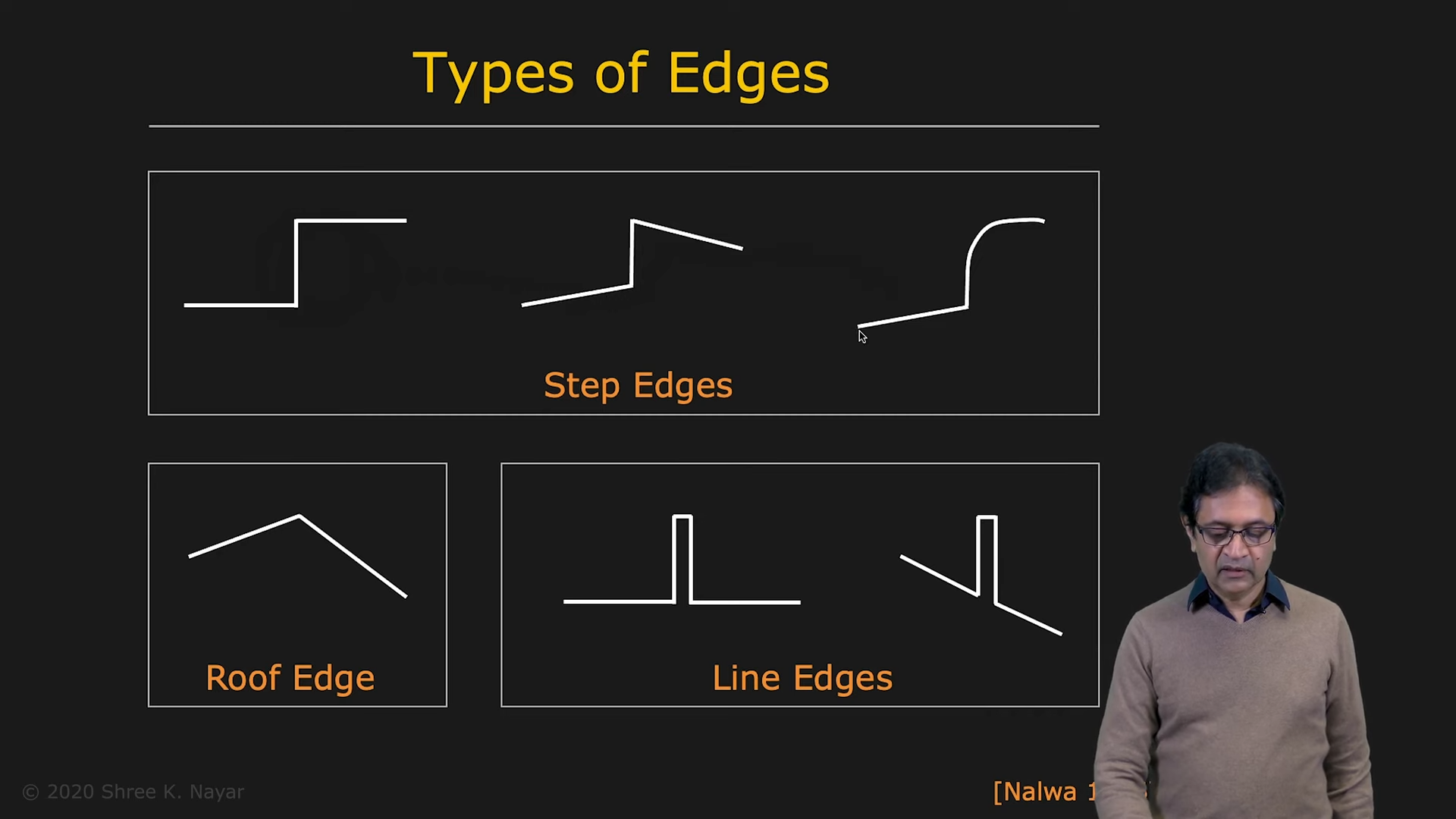
- 다양한 intensity function을 통해 edge를 modeling할 수 있다
 |  |
|---|---|
| edge의 원인들 | edge model들 |
 |  |
|---|---|
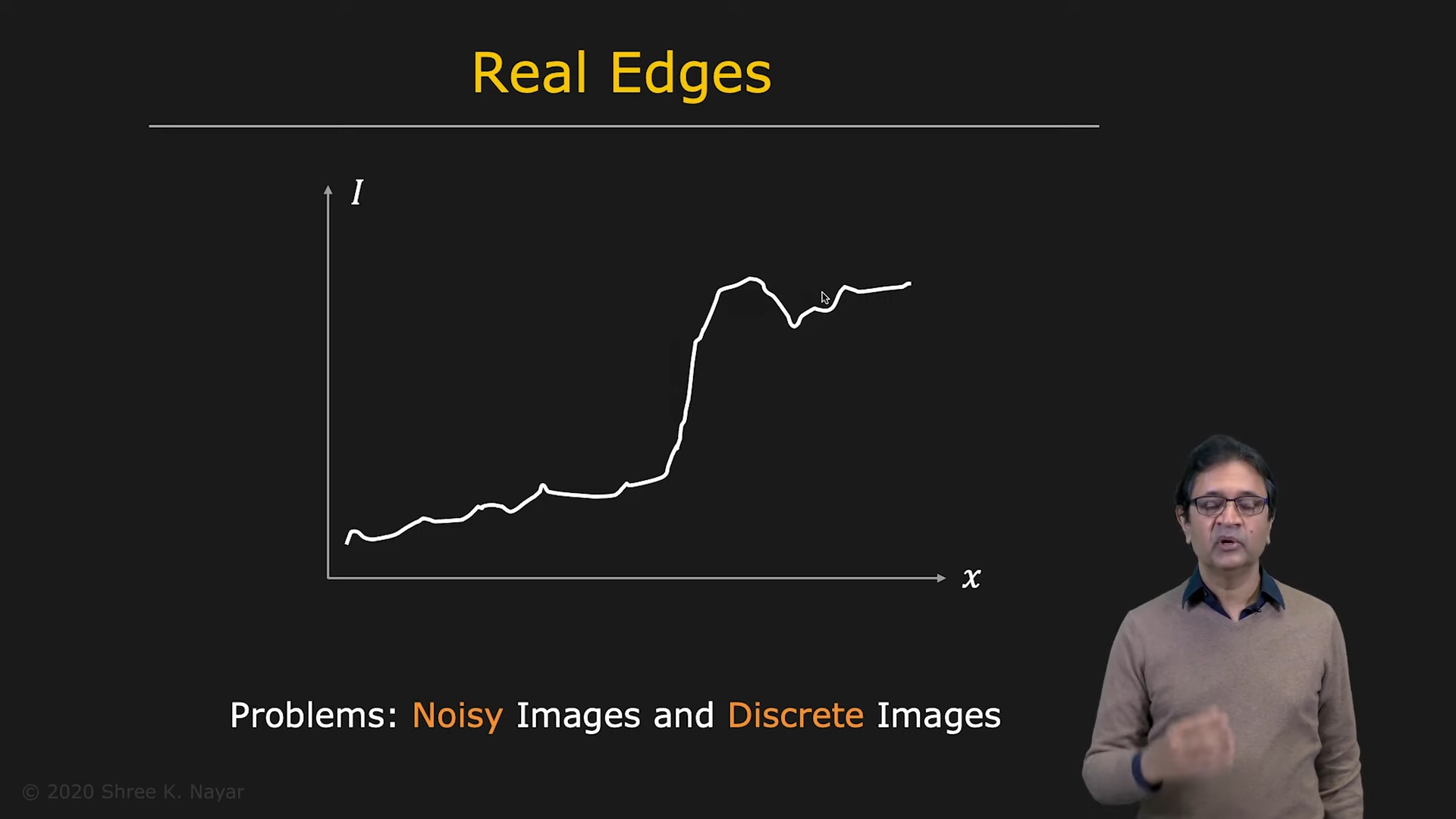
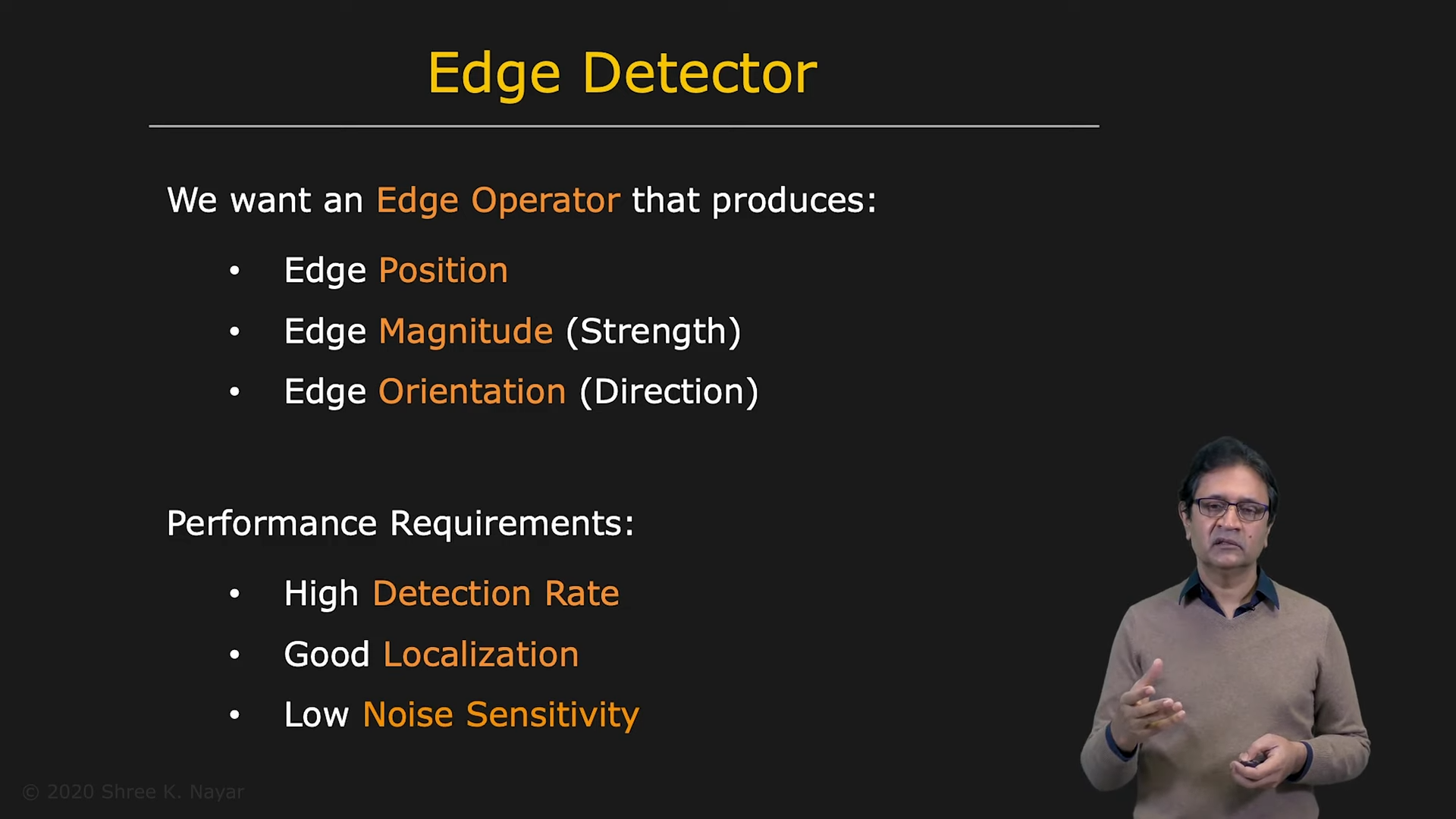
| 문제는 현실의 edge는 이상적이지 않다 | 그래서 좋은 edge detector는 이래야한다 |
Edge Detection Using Gradients
- Video Link
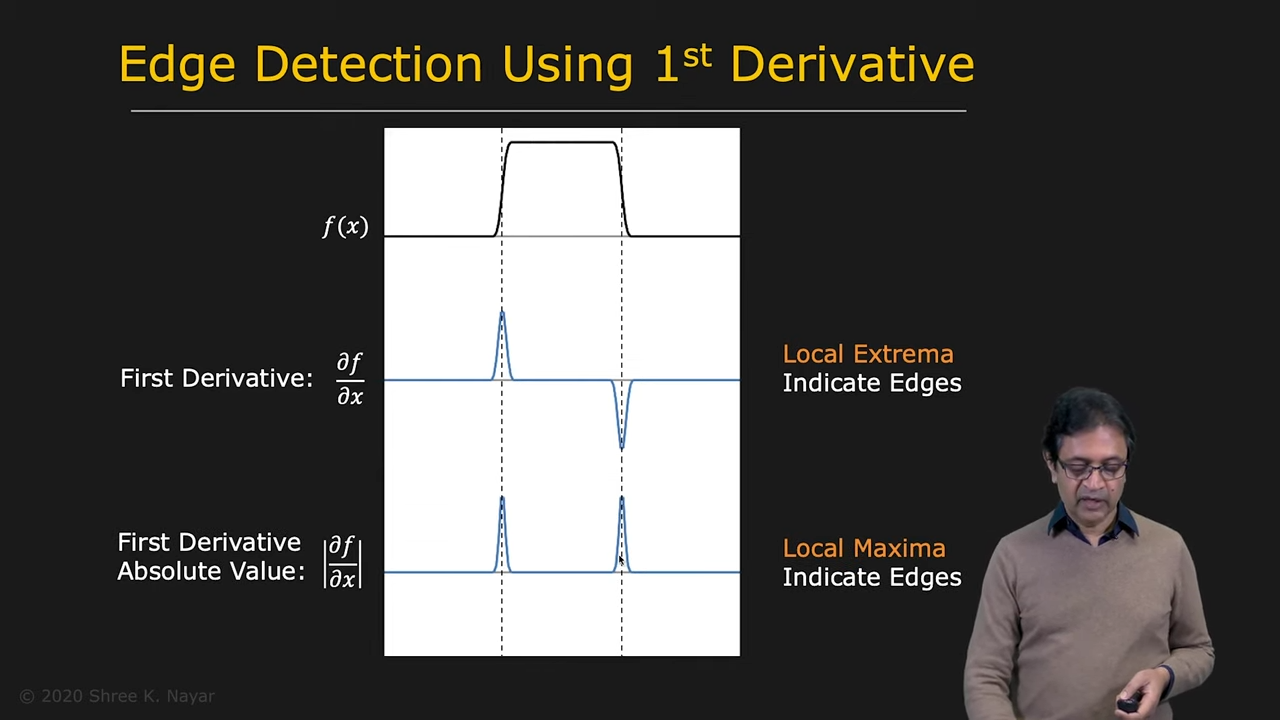
- 우리가 찾는 edge는 intensity의 급격한 변화이기에 1st derivative를 쓰는 것은 straight-forward하다
 |  |
|---|---|
| edge의 intensity 변화 | 1st derivative의 absolute value |
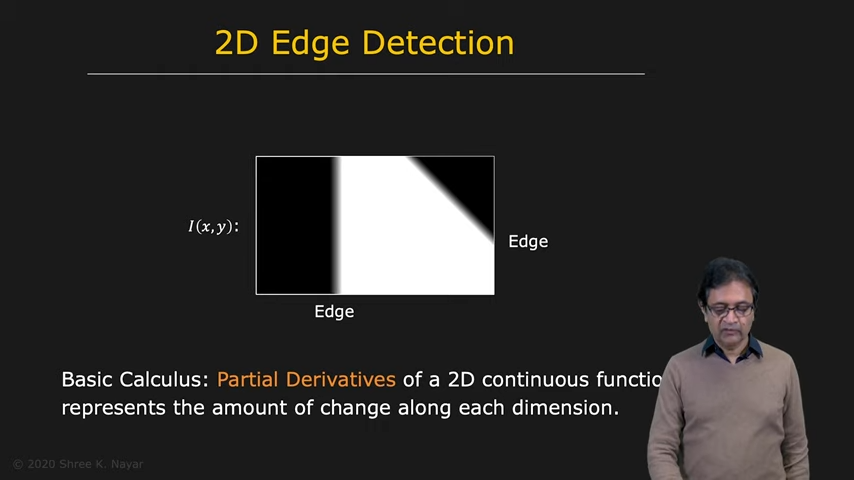
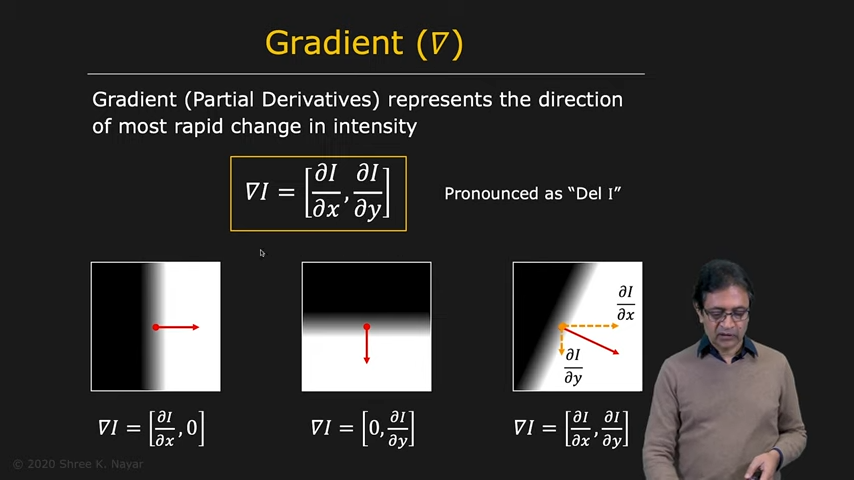
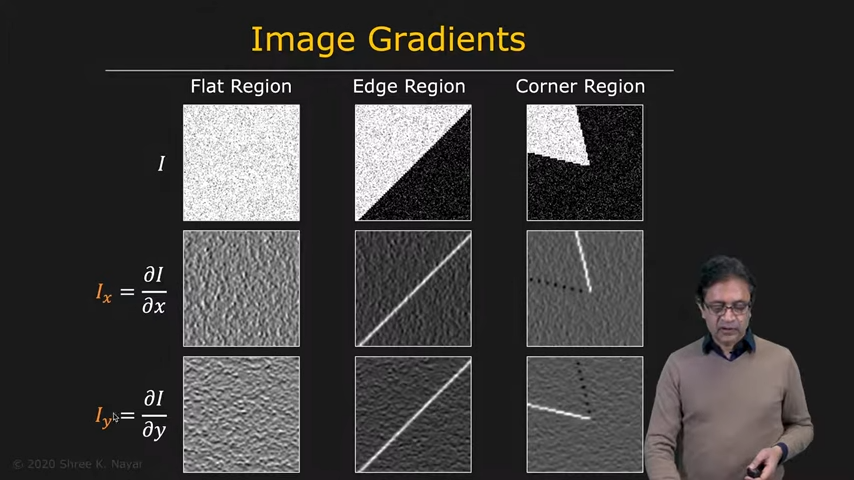
- 하지만 우리는 image를 다루고 있기 때문에 2d에 대해 고려해야한다. 그래서 partial derivative와 gradient가 등장.
 |  |
|---|---|
| 2d edge | gradient의 활용 |
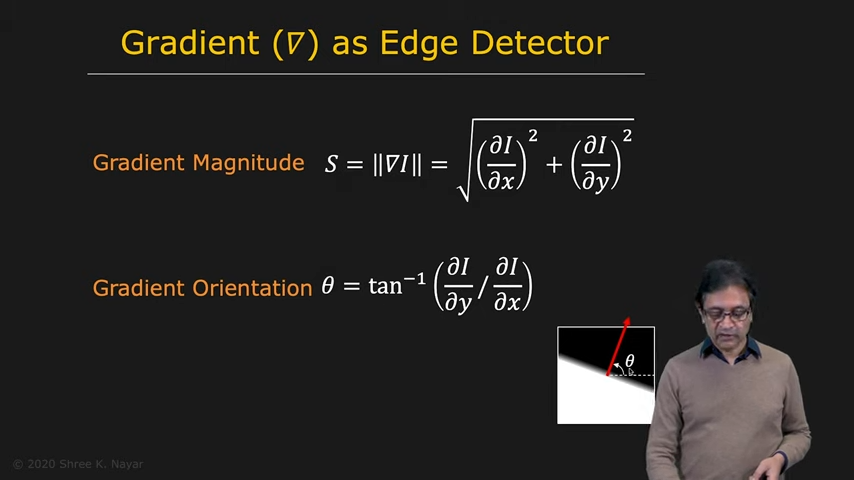 | 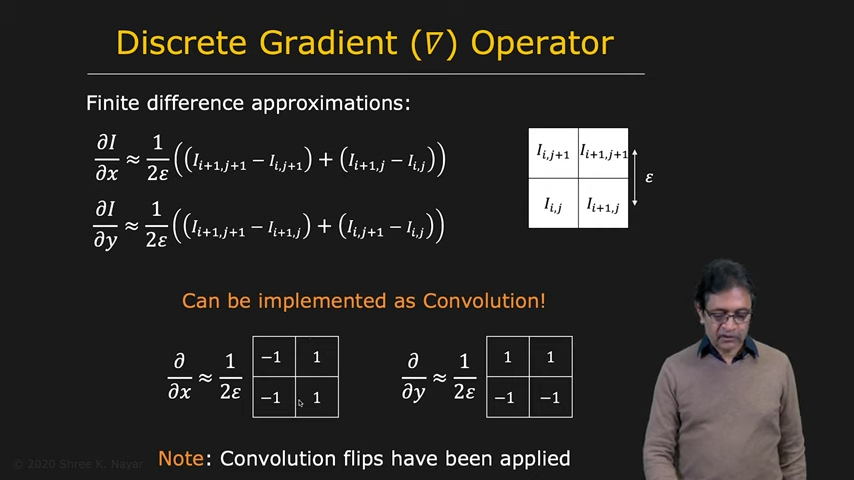 |
|---|---|
| gradient의 magnitude와 orientation 활용 | Dscrete Gradient는 Convolution을 활용할 수 있다 |
- sobel edge filter가 오랬동안 사용되어 왔으며, 이는 여러 상황에서 다양하게 활용가능하다
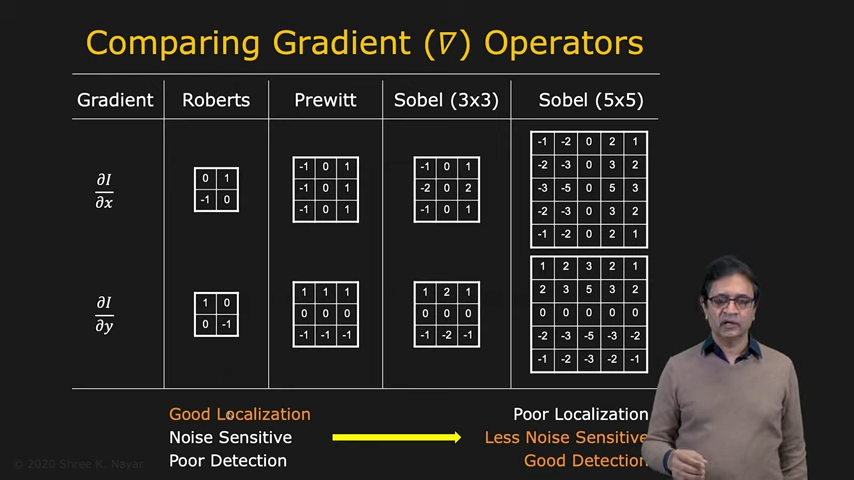 |  |
|---|---|
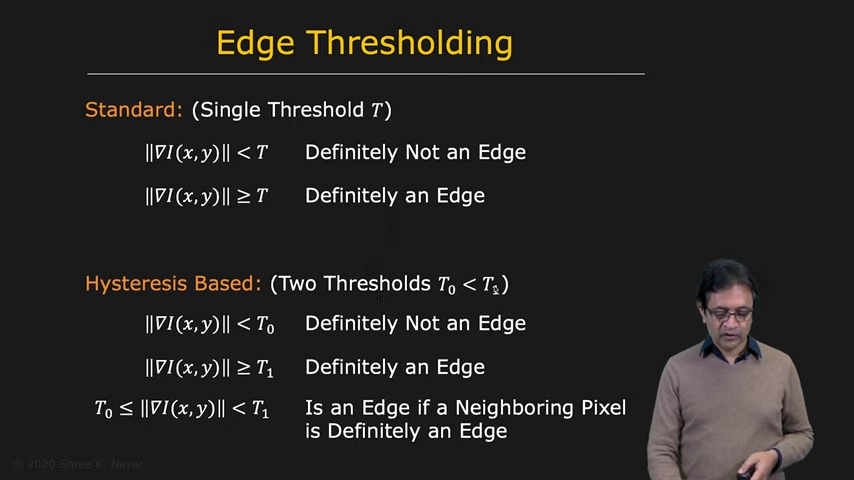
| 다양한 convolution kernel과 size에 따른 변화 | 마지막으로 edge를 thresholding할 때 어떻게 할지 생각해볼 수 있다 |
Edge Detection Using Laplacian
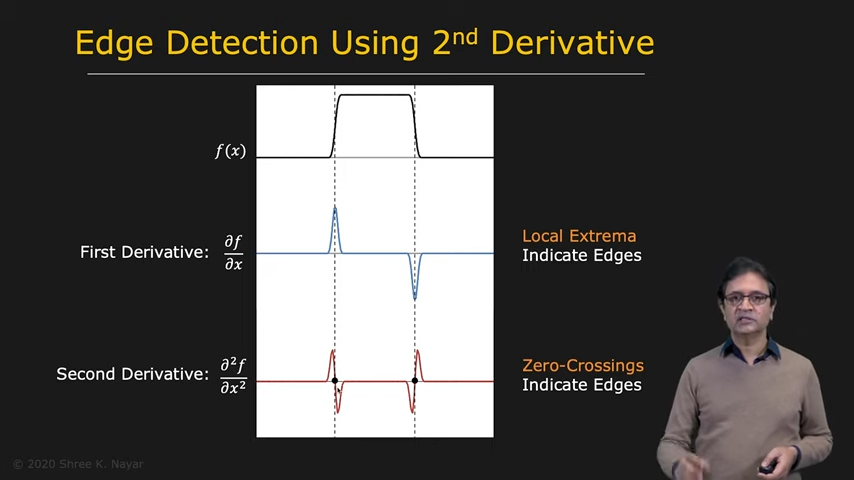 |  |
|---|---|
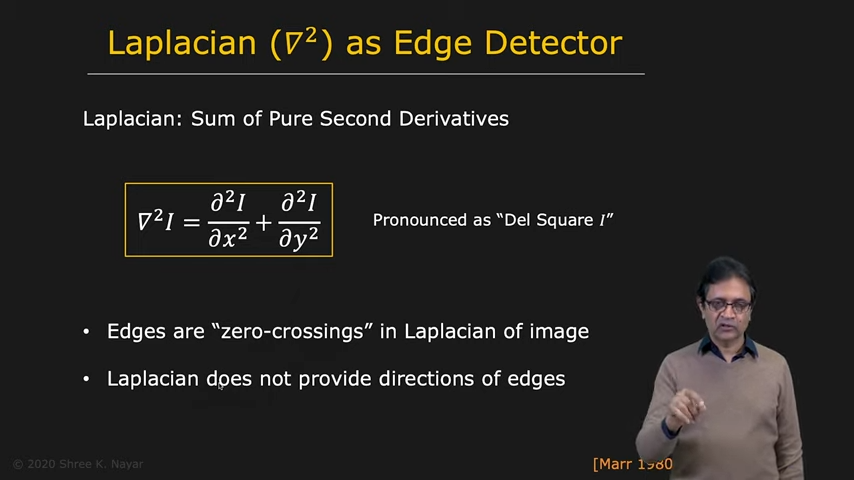
| 2nd derivative도 당연히 쓸 수 있다 | Laplacian이 여기서 등장한다 |
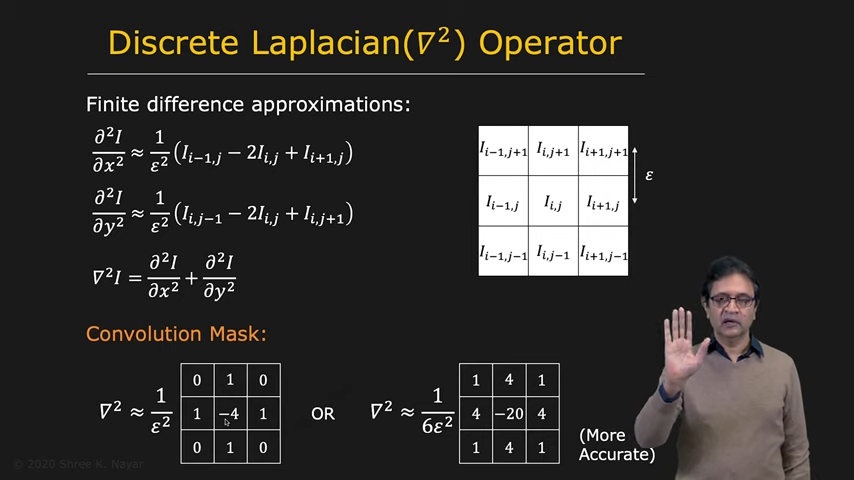 |  |
|---|---|
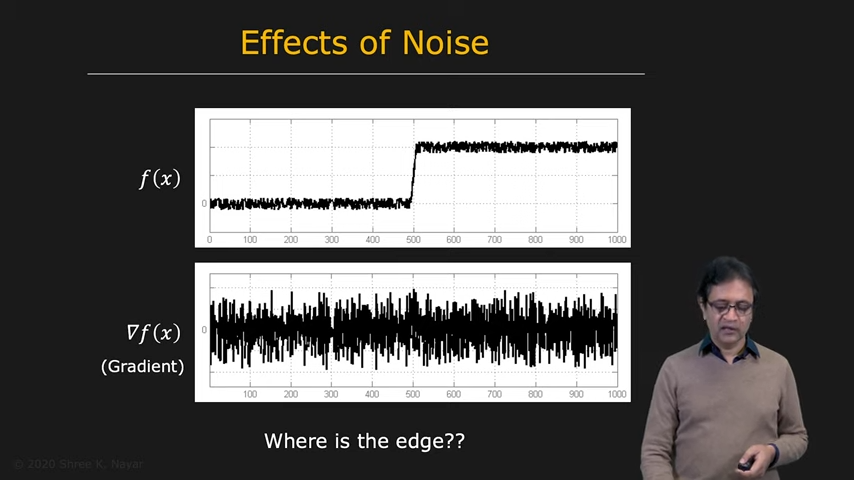
| discrete laplacian도 convolution을 활용할 수 있다 | Noise는 1st derivative에 영향을 미친다 |
- Noise를 해결하는 solution은 gaussian에 있다
- image를 gaussian할수도 있고, kernel을 gaussian할 수도 있다
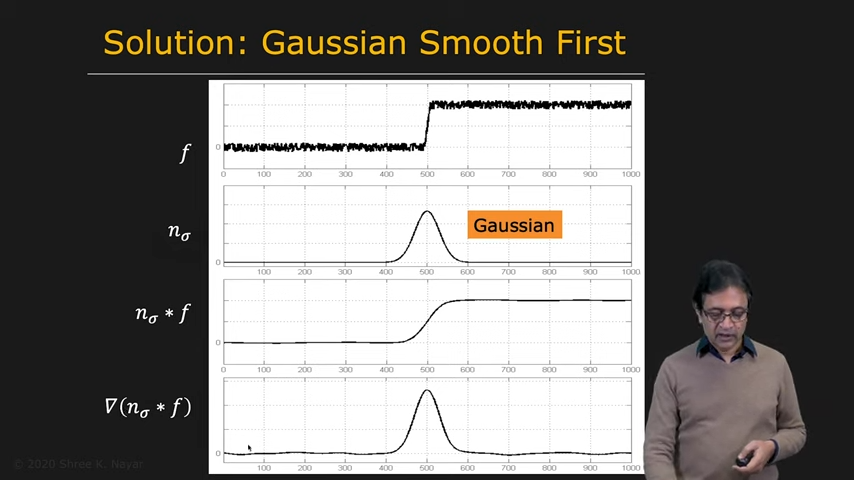 | 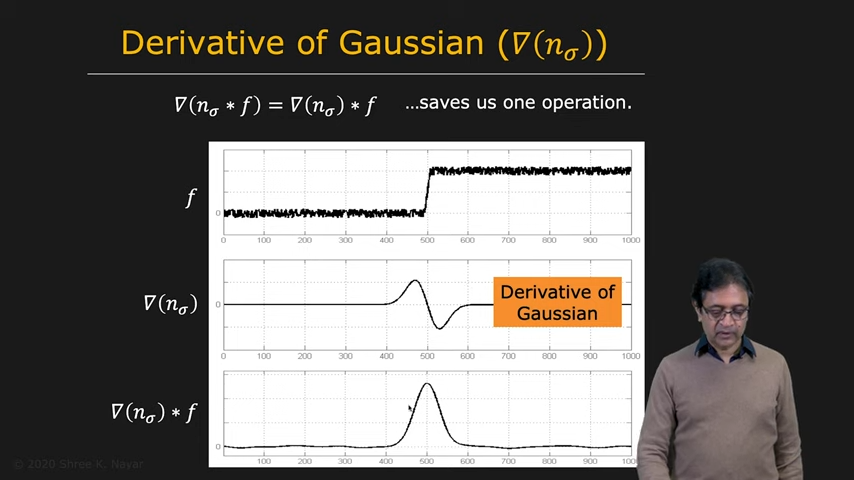 | 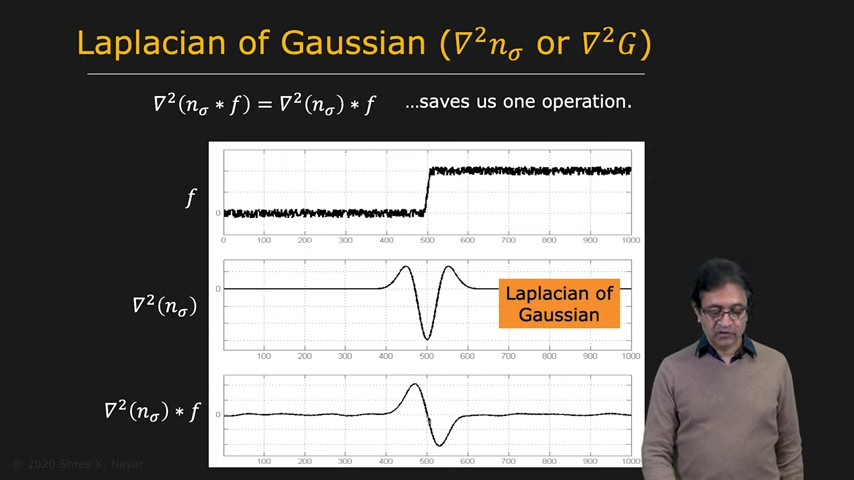 |
|---|---|---|
| Gaussian First | Gaussian의 1st derivative | Gaussian의 2nd derivative |
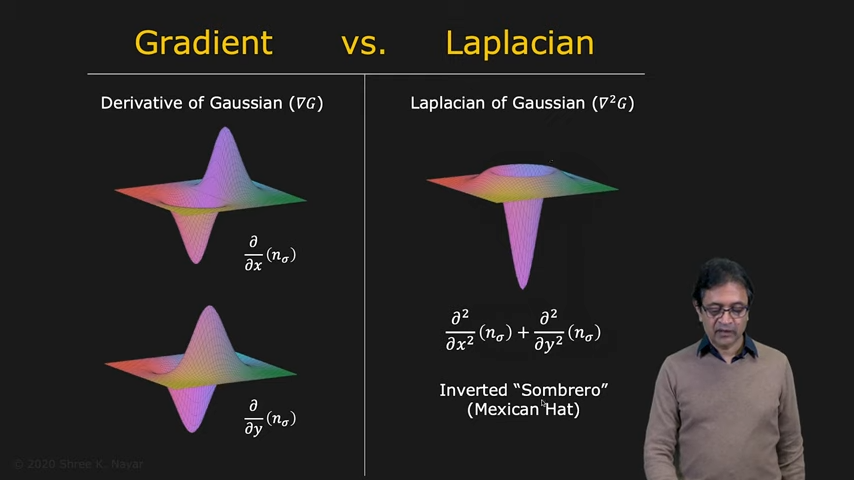 | 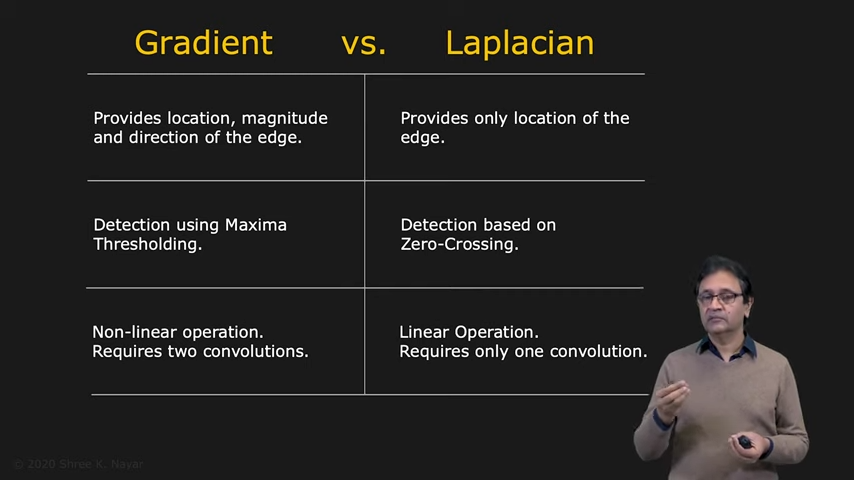 |
|---|---|
| gradient와 laplacian의 차이 | 각각의 edge detector의 차이 |
- 둘의 장점을 각각 활용하는 canny edge detector를 알아보자
Canny Edge Detector
- Video Link
- gaussian smoothing하고 sobel filter를 적용하고 gradient magnitude와 orientation을 구하고 이를 이용해 edge를 판별한다
- 오래 걸리지만 가장 많은 정보를 주고 다양한 상황에서 강인하게 동작한다
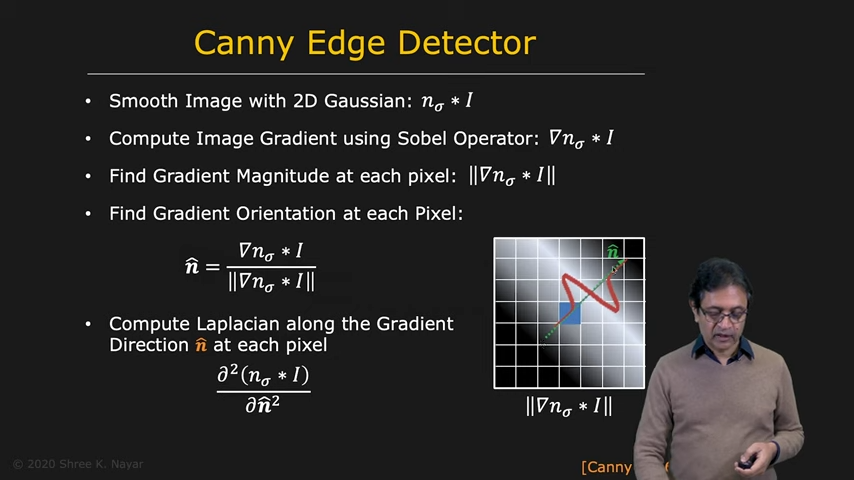 | 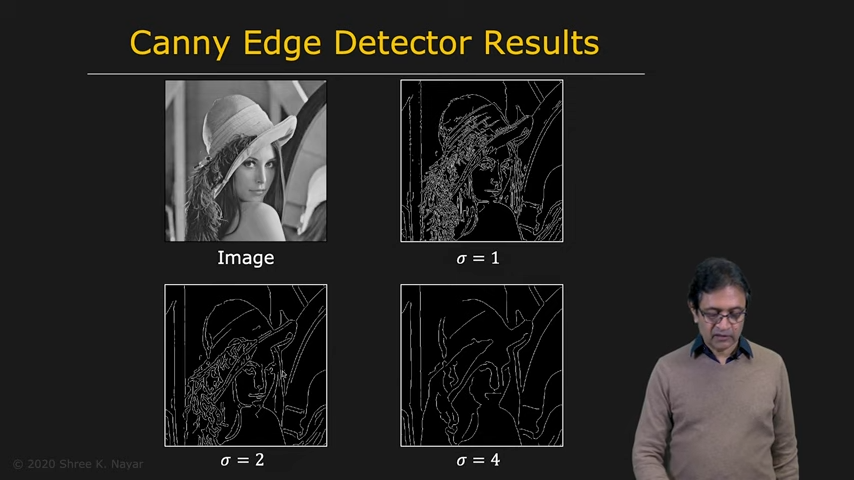 |
|---|---|
| canny edge detector | hyper-parameter에 따른 결과 차이 |
Corner Detection
- Video Link
- Edge가 만나는 곳이 Corner다
 |  |
|---|---|
| 당연하게도 이번에도 gradient를 쓸 수 있다 | 주요 아이디어는 image gradient의 distribution을 활용 |
 |  |
|---|---|
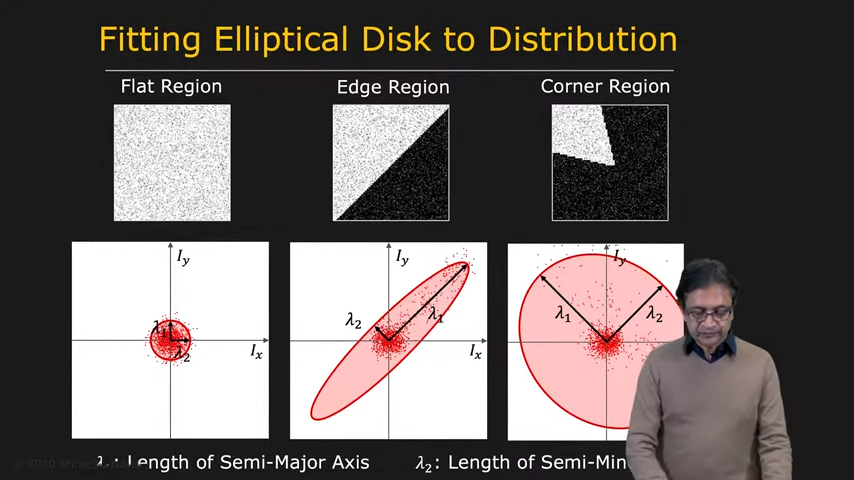
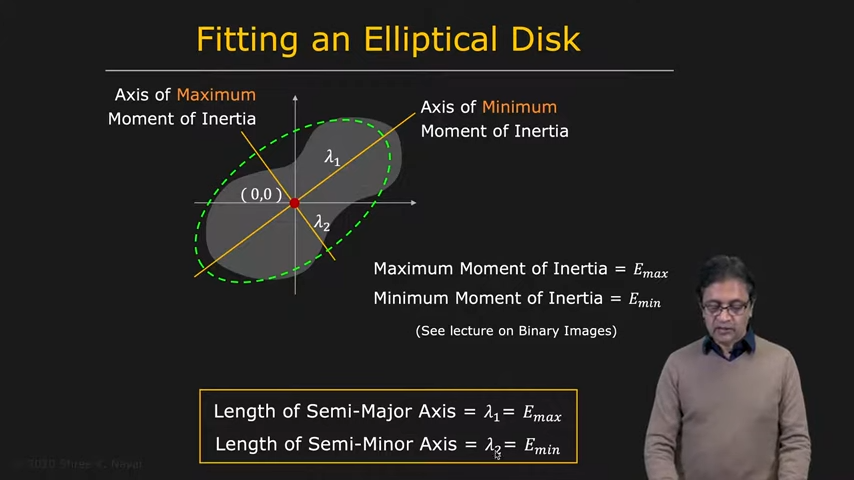
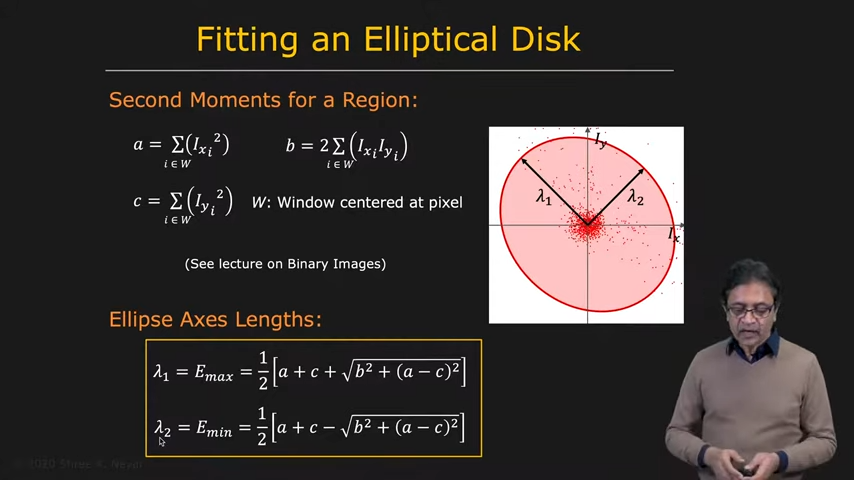
| lambda 1,2를 찾아내면 쓸 수 있다 | 요런 식으로 찾을 수 있다 |
 | 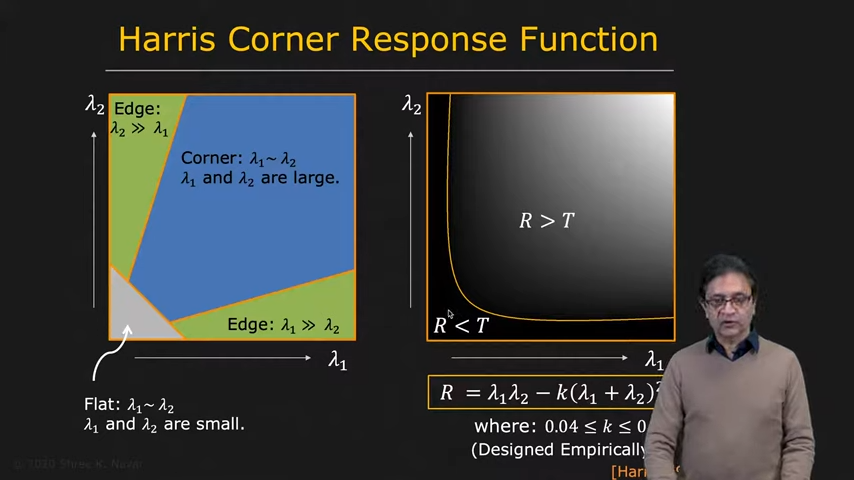 |
|---|---|
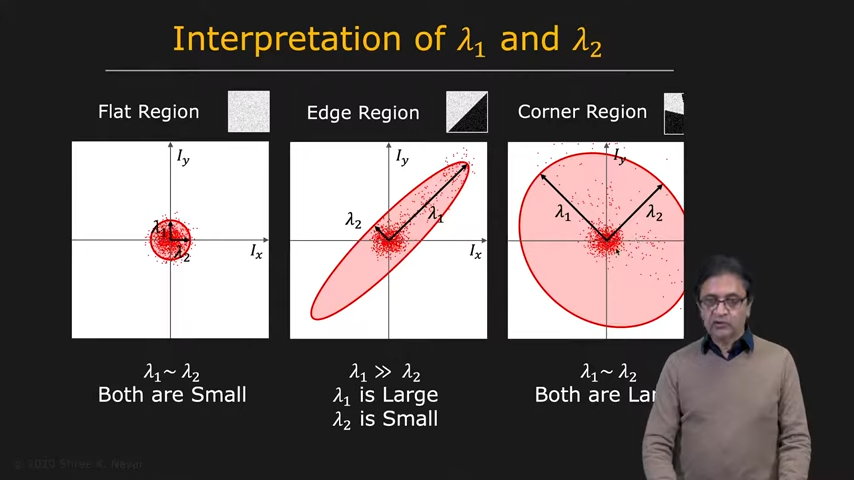
| lambda 1,2를 활용한 해석 | Harris Corner Response Function |
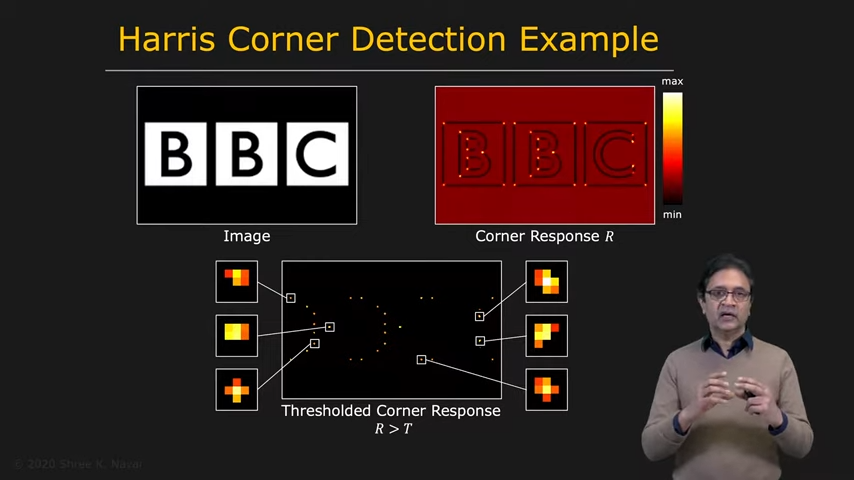 | 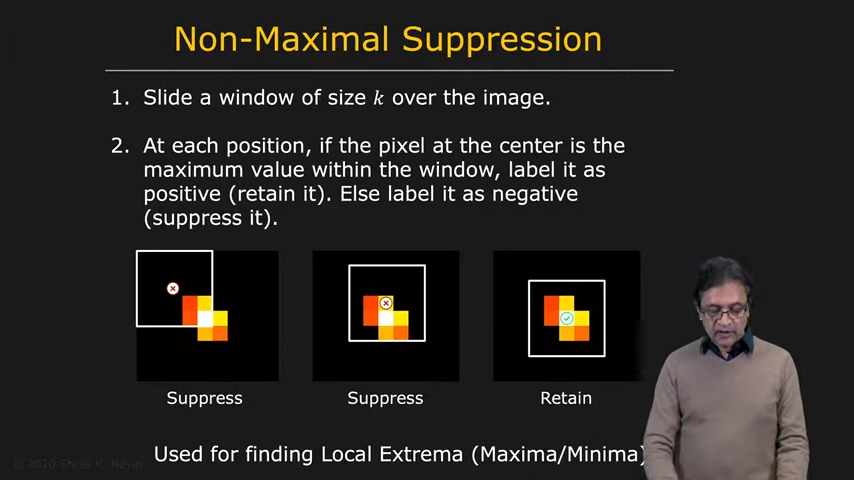 |
|---|---|
| Naive Harris Corner Detection의 예시 | Peak Value를 찾는 방법, Non-Maximal Surppression |
Boundary Detection
Overview
- Video Link
- Topics
- Fitting Lines and Curves to Edges
- Active Contours (Snakes)
- The hough Trasnform : Solve Inliner-Outlier Problem
- The generalized hough trasnform
Fitting Lines and Curves
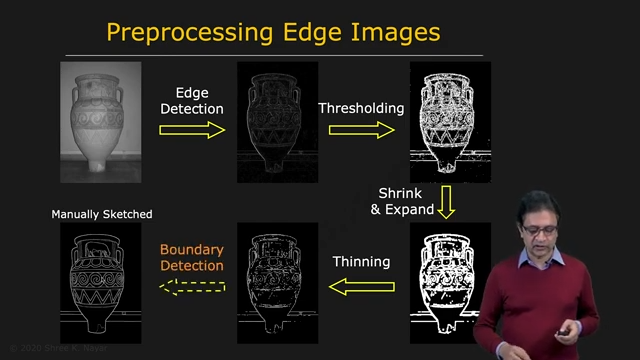 | 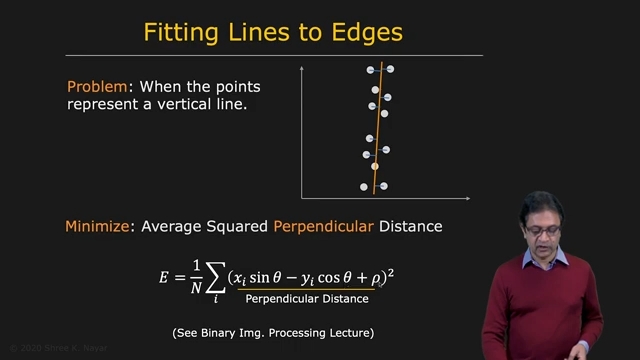 |
|---|---|
| Boundary Detection의 목표 | 문제 해결의 방향성 vertical distance 말고 perpendicular distance |
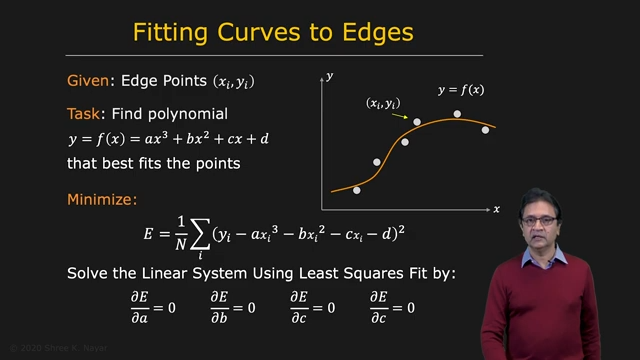 | 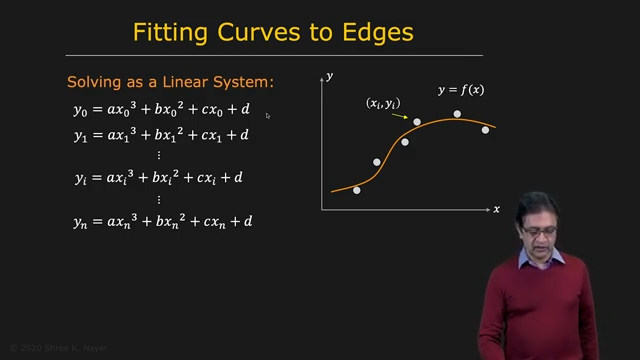 |
|---|---|
| 문제 해결의 방향성 원하는 수준의 곡선에 fitting | Solve Linear System |
Active Contour
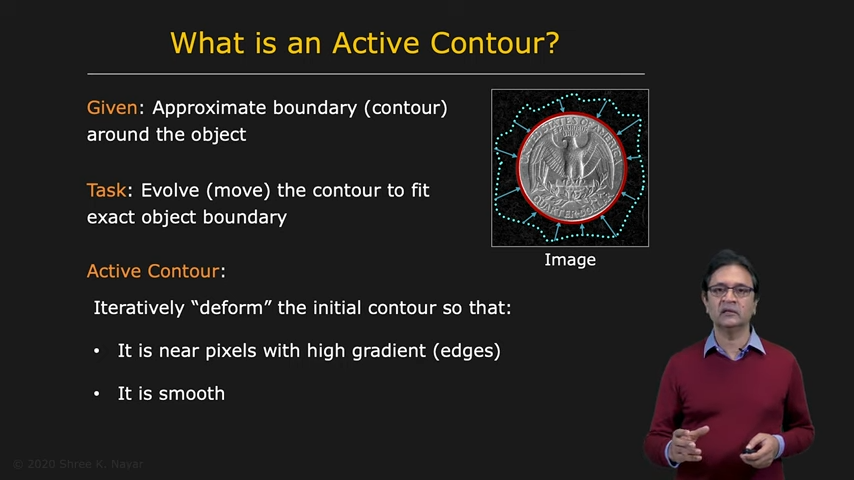 | 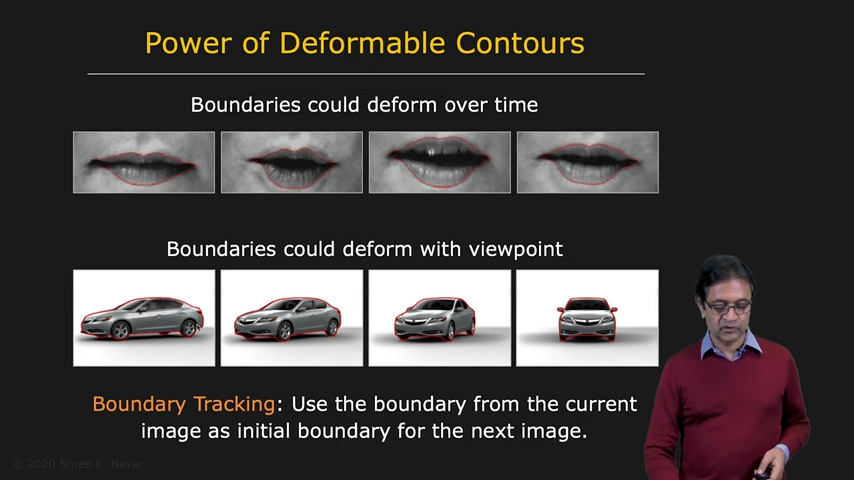 |
|---|---|
| Active Contour의 정의 | 왜 이런 일을 하는가? Tracking 등에 유용하다 |
 |  |
|---|---|
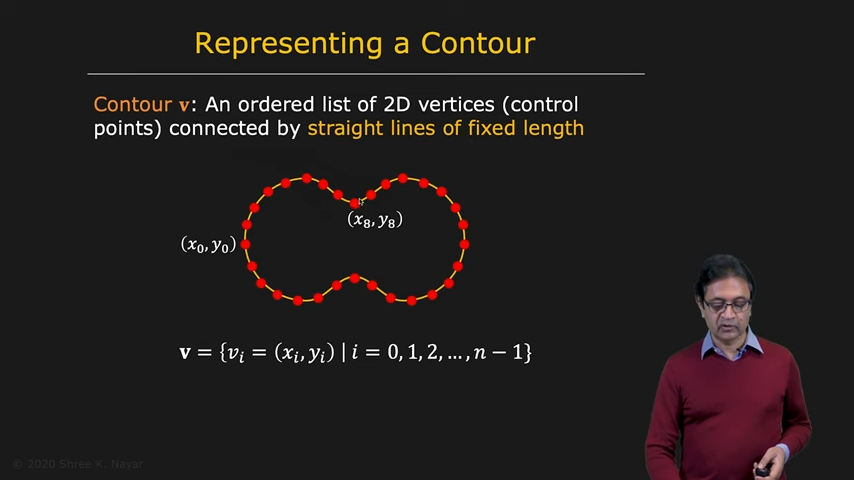
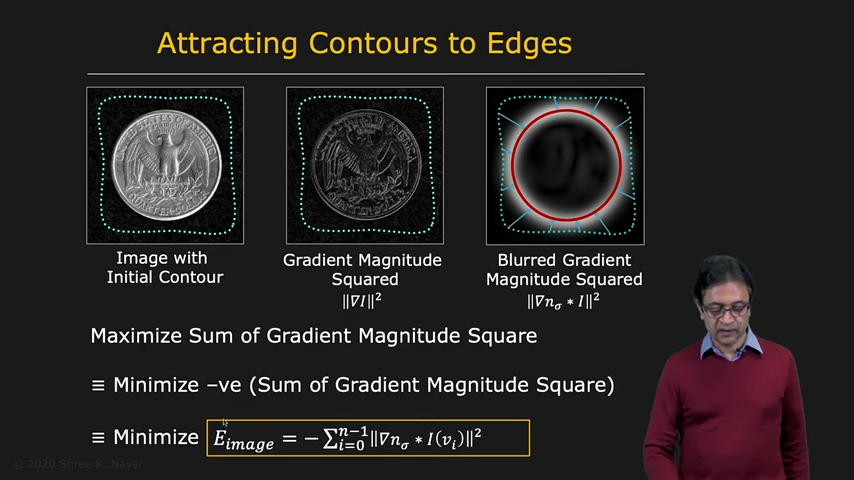
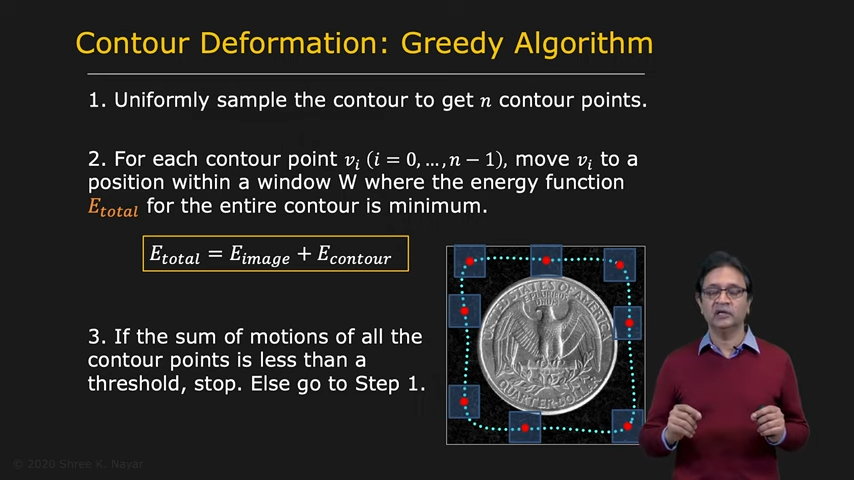
| Contour를 표현하는 방법 set of points | Blurred Gradient를 활용해서 point를 edge로 끌어당길 수 있다 |
 |  |
|---|---|
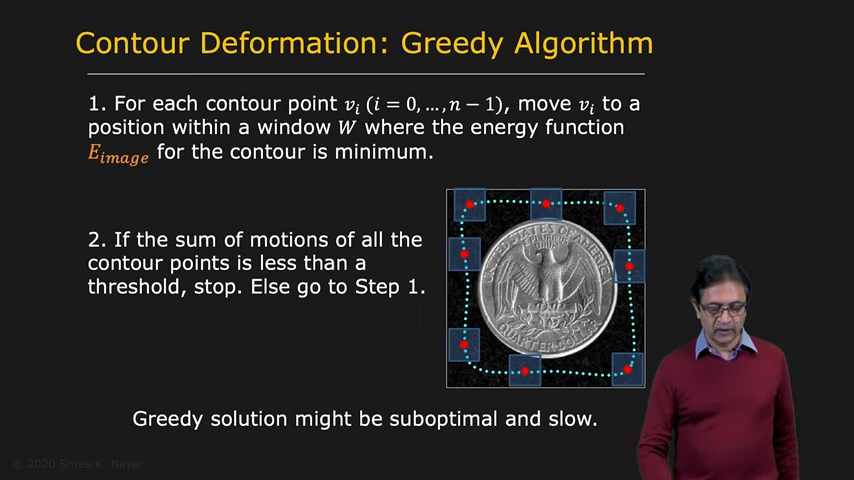
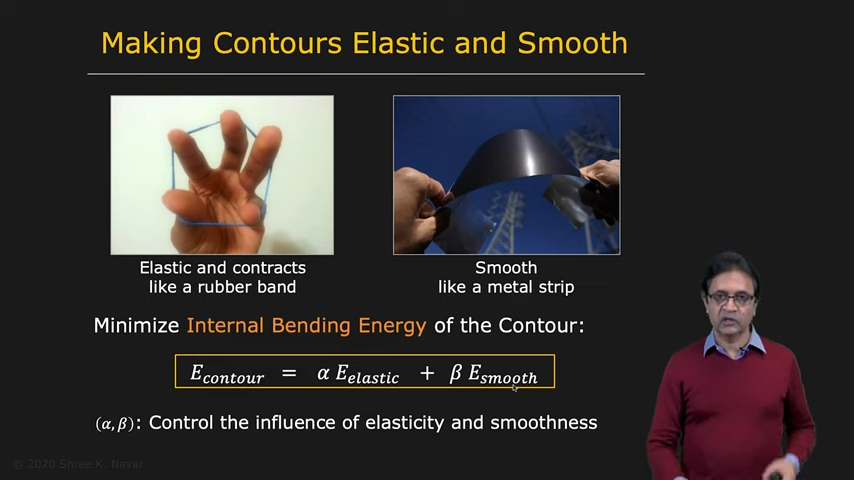
| 위의 아이디어들을 기반으로 Greedy Algorithm을 구현할 수 있다. 하지만 Noise에 약하고 느리다 | 이를 해결하기 위해 internal bending energy 아이디어를 도입할 수 있다 |
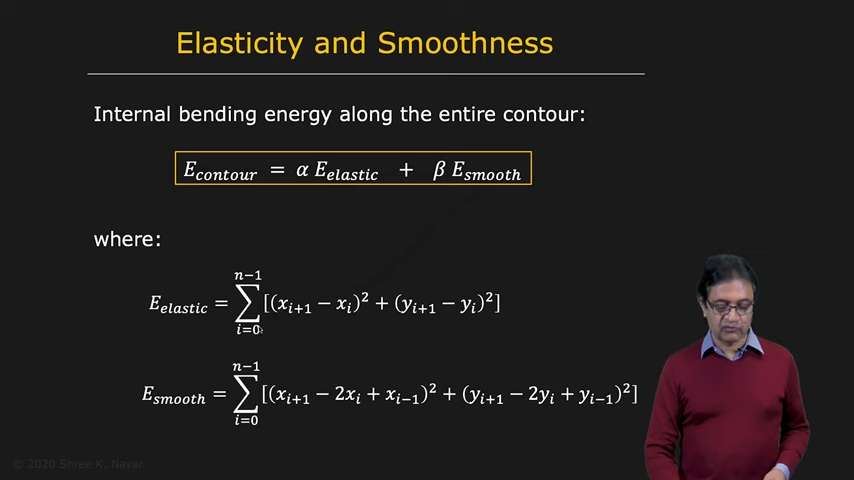 |  |
|---|---|
| 이렇게 계산할 수 있다 | 업데이트된 알고리즘은 다음과 같다 |
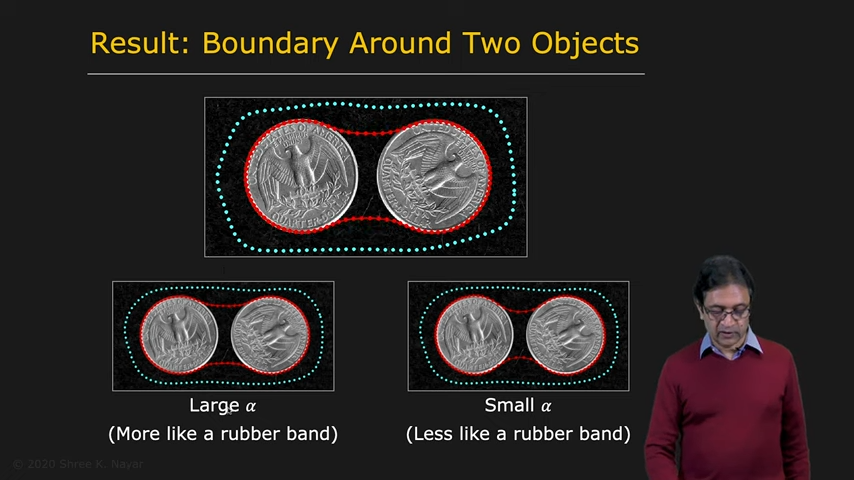 |  |
|---|---|
| 결과 예시는 다음과 같다 | 이 과제들과 방법론들에서 생각해볼점 |
Hough Transform
- Video Link
- TODO
TODO
TODO

블로그가 이전되었습니다. (2024.09.12) 홈페이지 참조 (https://yangspace.co.kr/)