시험기간이라서 노션에 쓴 거 걍 올림. 후배들에게 잘 써먹히길 바랍니다...🥹
What is Control and “Why it Matters”?
Control Domains
-Flight Control
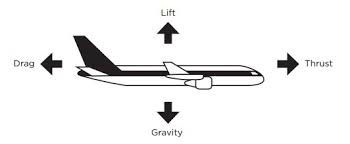
- 양력 : 비행기의 무게와 반대되는 힘. 중력보다 커야 비행 가능
- 항력 : 비행기가 앞으로 나아가지 못하게 하는 힘. 추력과 반대되며 추력보다 작아야함. (ex : 유도항력, 마찰항력)
- 추력 : 앞으로 나아가는 힘. 비행기가 움직이게 하는 원동력. 높은 추력으로 속도를 높이고 날개에 빠른 공기유동력을 가진다.
- 중력 : 지구가 비행기를 끌어당기는 힘. 무게 자체와 연관되어 있음.
Take - off
- 에어포일 상부와 하부의 압력차에 의한 양력이 발생함.
- 날개에 흘러들어오는 공기와 에어포일 사이의 각을 받음각이라 하며, 압력차로 인해 양력이 발생함.
- 받으각을 너무 크게 하면 항력이 더 커질 수 있으며 공기는 날개 단면을 따라 흐르지 못하고 분리되어 흘러 실속(속도를 잃어버림)할 수 있음.
- 방향타와 승강타를 이용해 꼬리의 수직력을 조절함
→ 이륙 필수 조건 : 양력, 높은 받음각, Flap&Slap 사용
Landing : Spolier로 공기저항을 높임
-Autonomous Vehicle Control
- 승차감을 위한 샤시 컨트롤
- Handling Safety
-UAV(Uninhabited Aerial Systems) & Drones
Control Basics
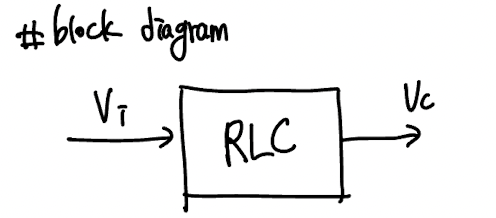
Block Diagrams
- 시스템의 input, output을 블록으로 설명함.
- 블록에는 플랜트의 동역학을 포함하지만 구체적으로 표현하지는 않음.
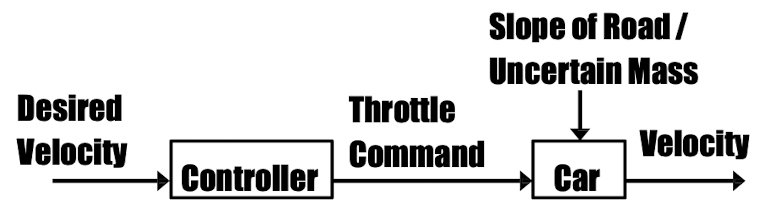
OpenLoop
- desired 결과값을 계산함.
- uncertain 값(오르막, 바람 등) 에 대하여 피드백 불가
- 복잡한 시스템에서는 정확한 값을 가져올 수 없음.
- 예시 :
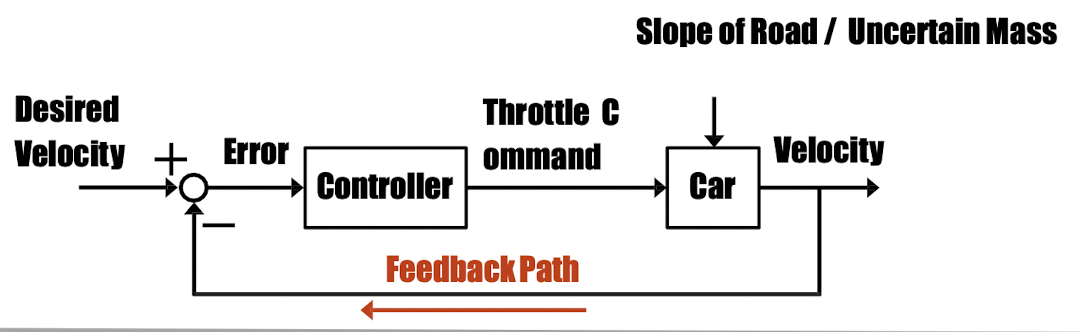
Close Loop/Feedback
- 현재 측정값을 반영하여 command 값을 계산해냄
- 그러나 trade off가 있음 : stability, speed of response, sensor noise rejection...
- 예시
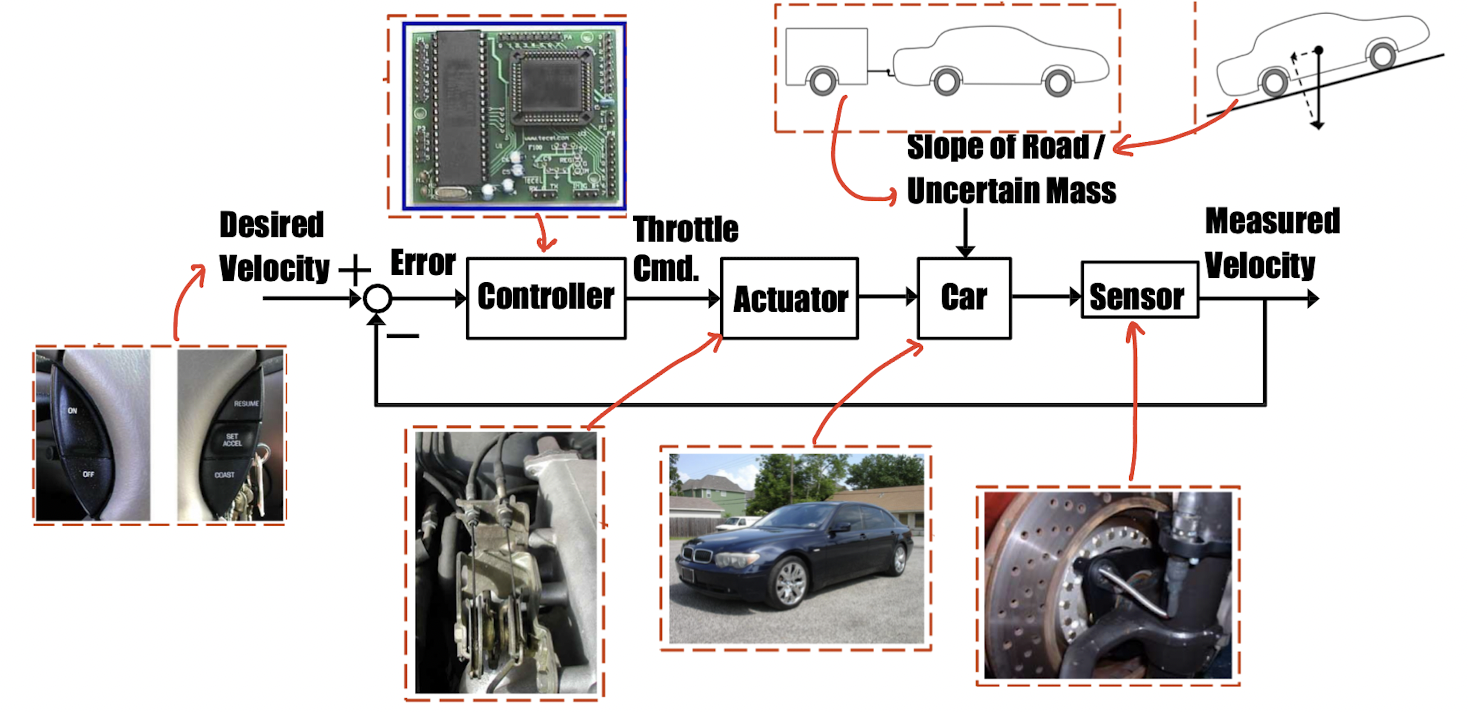
Cruise Control System Block Diagram
Control Design
→ 공학에서 Design은 미적인 디자인보다는 ‘설계’ 의 의미를 훨씬 더 강하게 내포하고 있음.
Design Process
- Model the System : using Differential Equations
- Design the Control Algorithm : PID 등
- Analyze and Simulate : 이론, 시뮬레이터 사용
- Implement the controller and experiment
- Iterate
- Model은 단지 “approximation”일 뿐 현실에서 시스템을 검증해야함. → Model은 incorrecties를 가지며 control system 설계를 위해서는 simplest model(essential dynamics)를 정의해야함
Primary Method for Constructing Dynamic Models
- First Principles : 물리법칙(뉴턴의 운동 제 2법칙 F=ma)
- Black Box : Experimental input/output data와 연관
- Grey Box : 1+2, 모델 파라미터를 구하기 위해 1,2방법을 모두 사용
- Modeling 은 “domain-specific”한 과정이다. 도메인에 따라서 모델링 스텝이 다름. 그러나 최종적인 model, equation 형태는 비슷함!
Modeling Practice
Mechanical System
→ Dynamics of Mechanical System은 대부분 뉴턴의 법칙을 따른다.
- Moving Mass
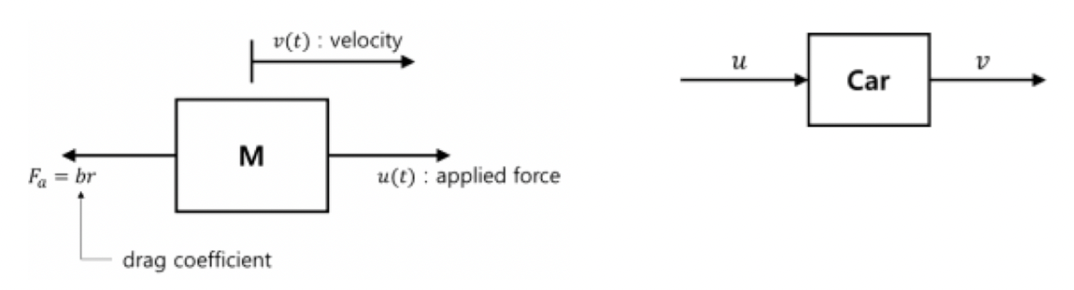
추력 - 항력X속도
: First Order ODE
→ 수학적으로 설명하기 좋은 형태로 변형함
- Linear Differencial Equation (Ordinary Differential Equation : ODE) : 시간에 따라 달라짐. v(t), u(t)에 대한 선형적인 의존성을 가짐.
- 시간 t에 대한 v(t)fmf dPcmrgkrl dnlgotjsms 1) t=0에 대한 v가 정해져야 한다 → Inital Condition 2) t=0~t=t 까지의 input을 알아야한다.
- Mass-Spring-Damper
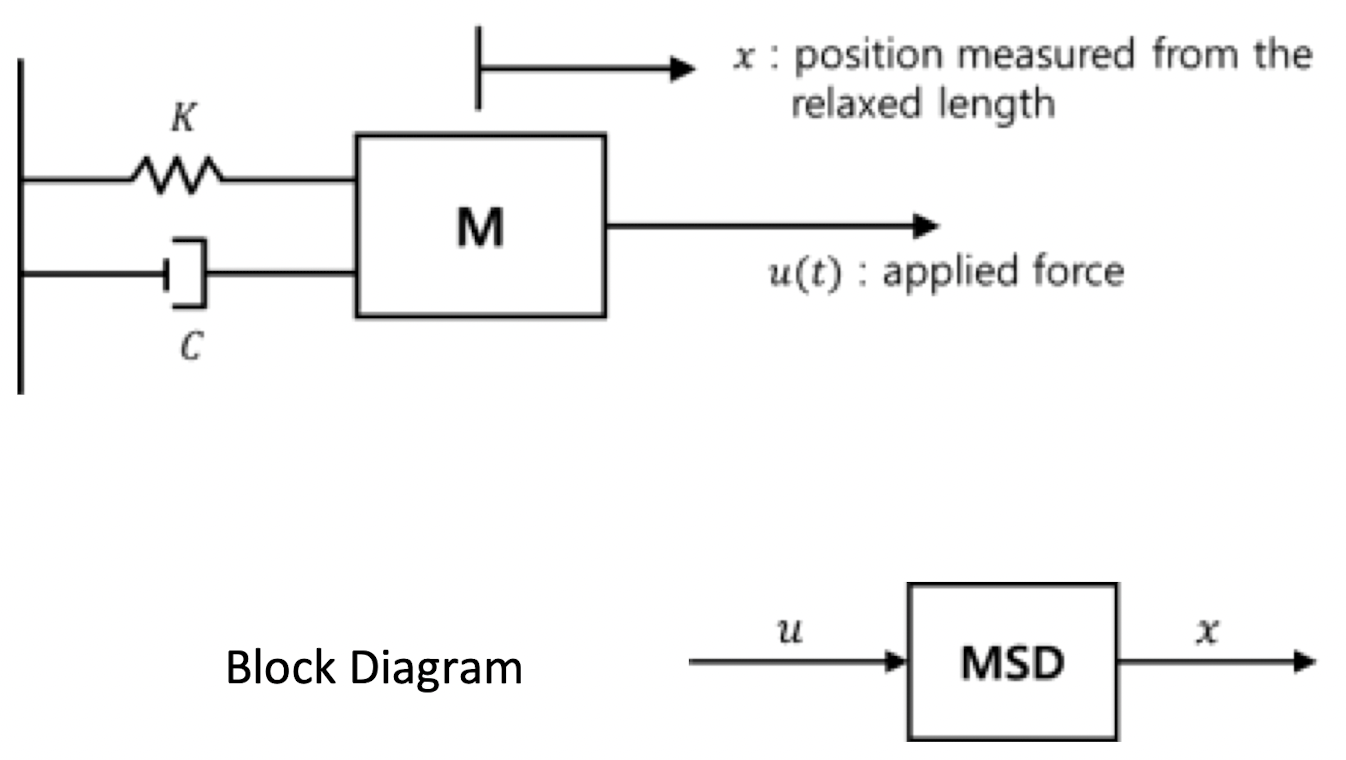
1) Linear(Hookean) Spring
2) Viscous Dampler
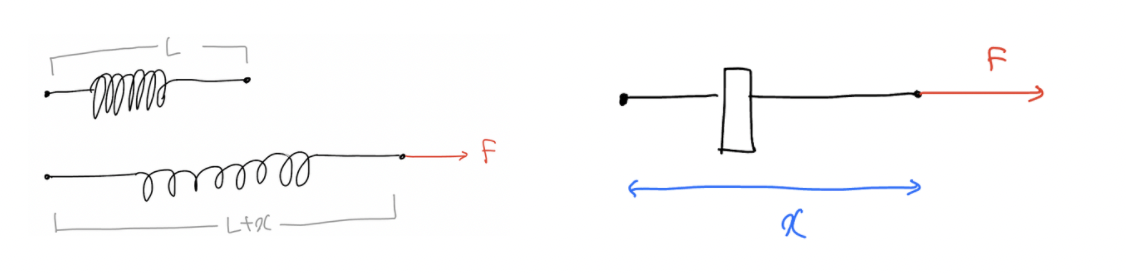
(k = spring coefficient)
(c = damper coefficient)
3) Free Body Diagram for Mass & Block Diagram

: 2nd Order ODE
(오른쪽 블록 다이어그램)
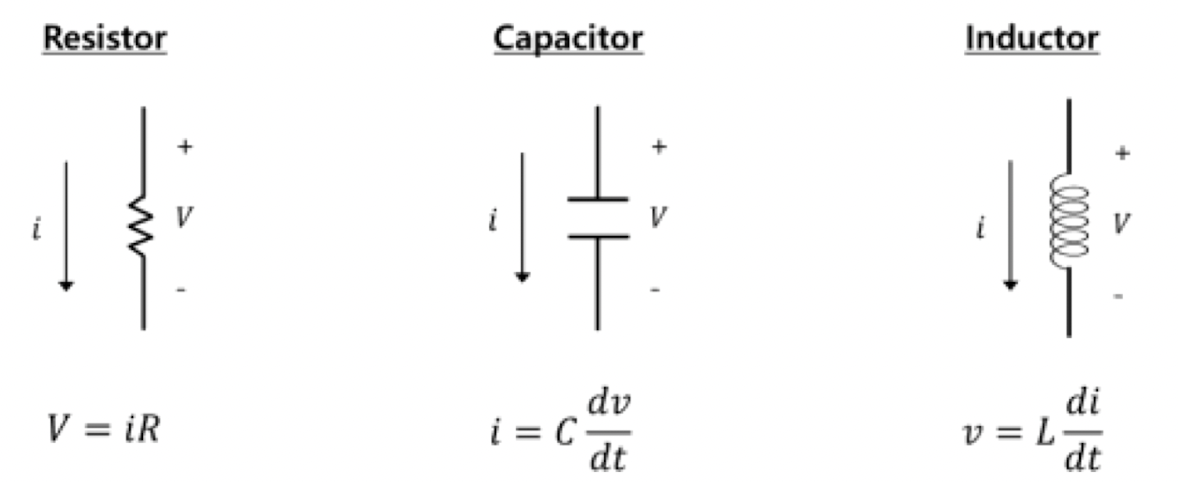
Electircal System
→ Passive Electrical Components : Resister, Capacitor, Inductor
-
Kirchoff’s Current Law : KCL
임의의 접점에서 모든 전류의 합은 0이다.
Positive(+) : 노드를 나가는 전류 :
Negative(-) : 노드로 들어오는 전류 :

-
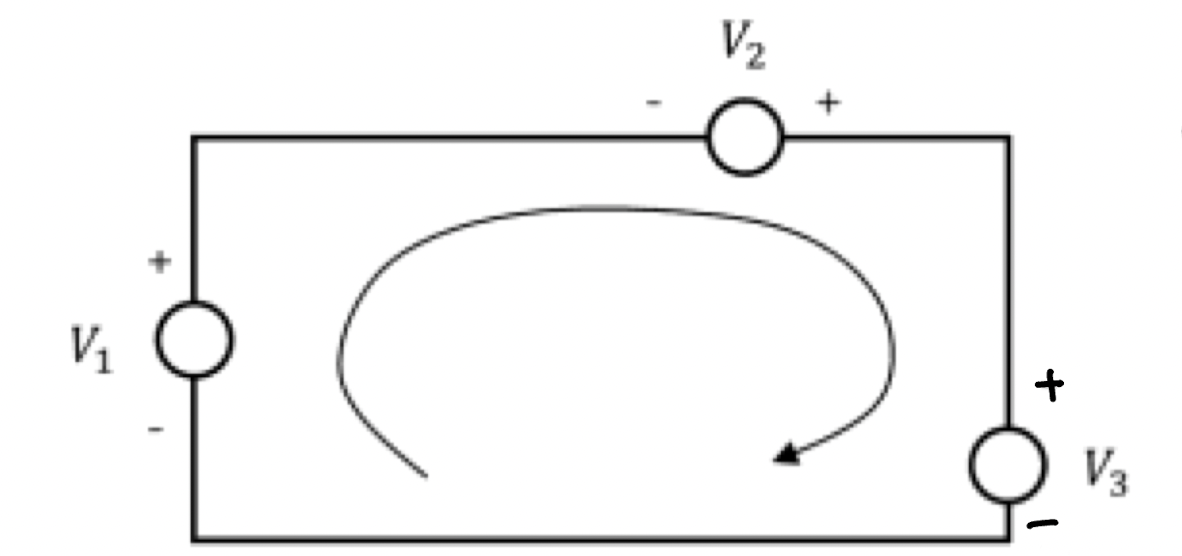
Kirchoff’s Voltage Law (KVL)
폐회로에서 모든 전압의 합은 0이다.
Positive : voltage drop :
Negative : voltage rise :
- RLC Circuit
*단, 모든 요소가 이상적이라고 가정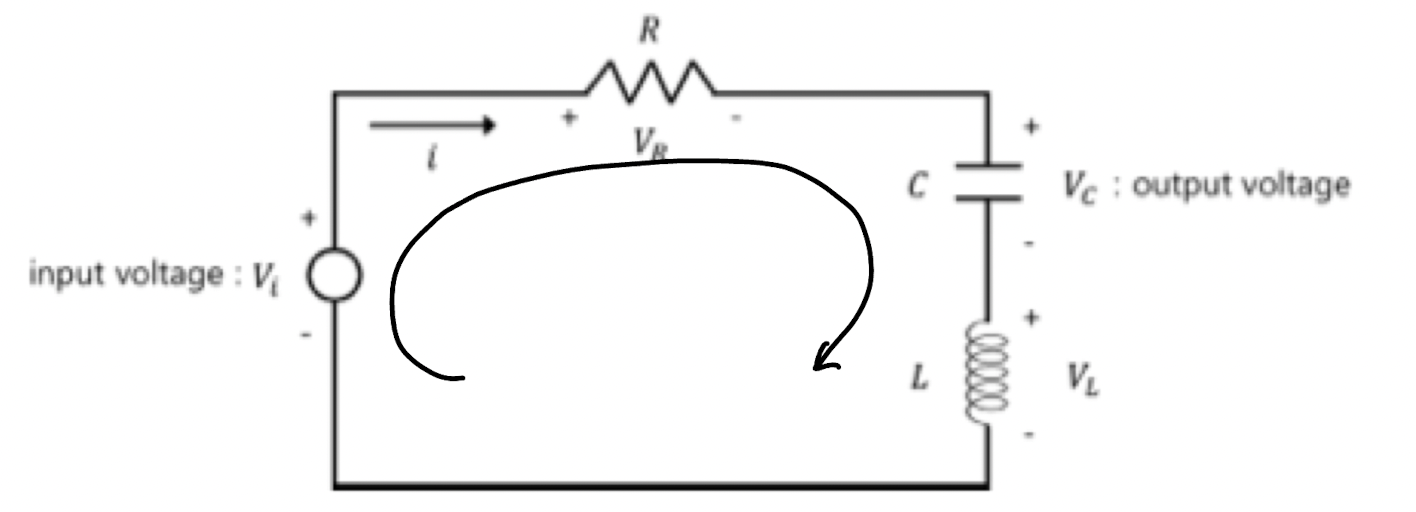
Aerodynamic Systems
→ 강체 뉴턴법칙(? Newton’s laws for the rigid body Dynamics)와 유체역학을 적용한다.
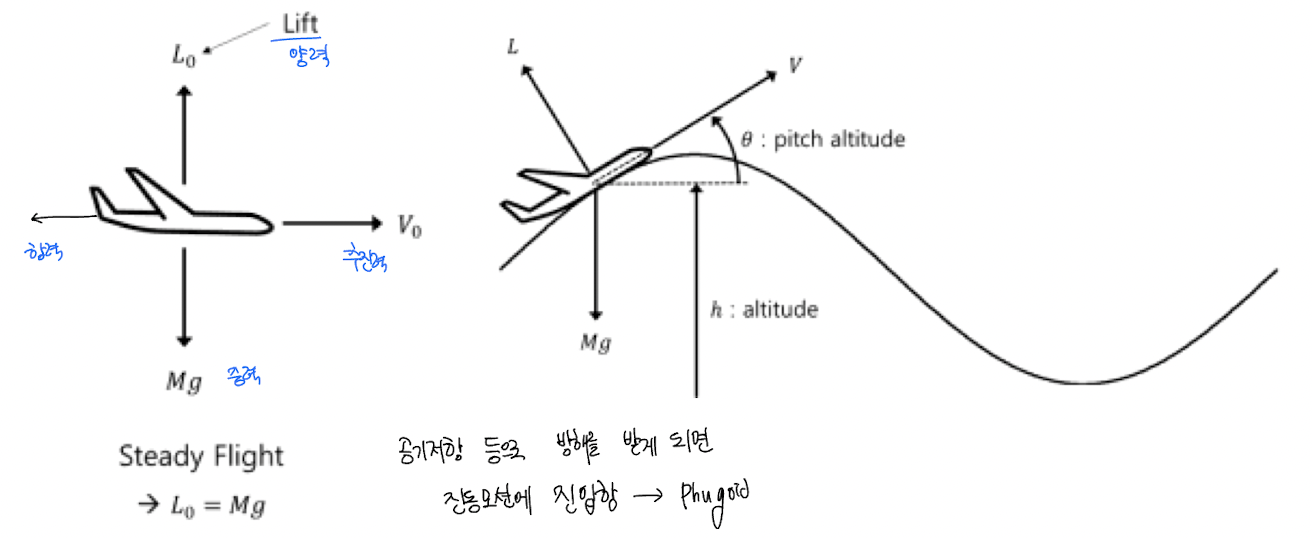
- Lanchester Model for the Phugoid Dynamics
Assumption
-
모든 에너지는 보존된다. (The Energy is Constant)
(inital kinetic E = kinetic E duing oscillation + potential E)
-
양력은 에 비례한다.(The lift force is proportional to )
k = standard aero notation
(=공기밀도, J=단면적, = lift coefficient)
뉴턴의 제 2법칙에 의하여
(*)
- 에 의하여 다음과 같이 쓸 수 있음
ii. i. 에 의하여 다음과 같이 쓸 수 있음
Steady Flight 에서
L_0 = kv_0^2 = mg
*에 대입하면 다음과 같이 정의할 수 있다.
+Assumption
pitch 는 매우 작음. ()
따라서 Lanchester Model로 Phugoid Motion 을 유발함.
→ Autonomous Model : 식의 우항이 0일 때(=input 이 0이다)
( = reference speed)
+) Phugoid 모드는 낮은 frequency 로 약하게 진동하는 것을 뜻하며 이 때 속도 u, pitch attitude , 높이 h를 가진다.
비행기가 진동주기의 상점에 있을 때 속도가 느려지고, 하점에 있을 때 속도가 빠르다. (에너지보존법칙)
Summary
시스템은 Linear ODE로 표현 가능하다.
일반적인 n차 ODE는 다음과 같은 형태이다.

일반화를 위한 Assumption
-
-
m ≤ n
m : input term이 가진 항의 개수
n : 미분 term이 가지고 있는 좌측 항의 개수
Initial Condition(I.C)
→ y의 k번째 미분 term →
