시스템모델링제어 Chapter4. Open-Loop Control
First Order System 을 base로 open-loop vs closed loop 제어성능 비교!
전체적으로 예시를 가지고 설명!
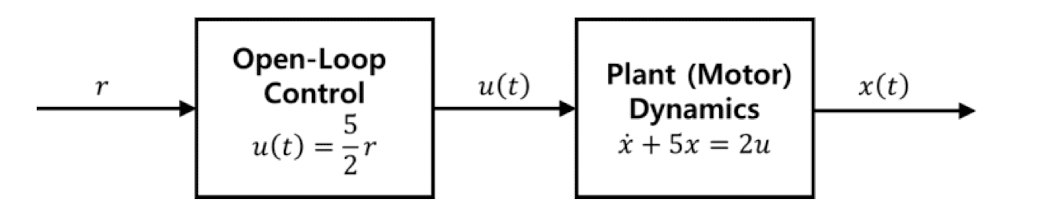
Open-Loop Control
DC모터 Inertia J. output x(t) 는 샤프트 각속도(rad/sec), input u(t)는 volage(V). 단, eletro-mechanical System의 도메인 특성을 다음과 같이 설정하여 가정함.
1) 전기적인 신호는 굉장히 빠름 → step response
2) Voltage v(t)는 모터토크에 바로 반영됨!
Ku(t) = Torque … shaft에서!
3) shaft bearing에는 마찰이 존재함. - cx(t)
Jx˙=Ku(t)−cx(t)
Assum=⎩⎪⎪⎨⎪⎪⎧J=2kg⋅m2K=4vN⋅mc=10N⋅m⋅sec
⇒2x˙+10x=4ux(0)=0
Step Normalize
{x˙+5x=2ux(0)=x0
⇒ a = 5 > 0 → system is stable!
Design Objective
- “r” 을 “desired reference command” 라고 한다. → 여기서는 샤프트 속도!
- voltage u(t)를 입력하였을 때 실제 모터 샤프트 속도가 desired speed r에 수렴하는 지 확인해야함
- desired speed x(t)는 r에 수렴할 것임. r은 상수이다!
Step Response
x(t)=ab(1−e−at)u0
∴x(t)=52(1−e−5t)u0
이 시스템이 Steady-State 에 도달한다고 할 때(t→∞), x˙=0이다.
⇒xss=abu0=52u0
Conclusion
Step Response에서 x(t)→abu0=52u0 에 수렴함. Design Object는 x(t)→r 하기 위한 V(t)를 찾아내는 것이다!
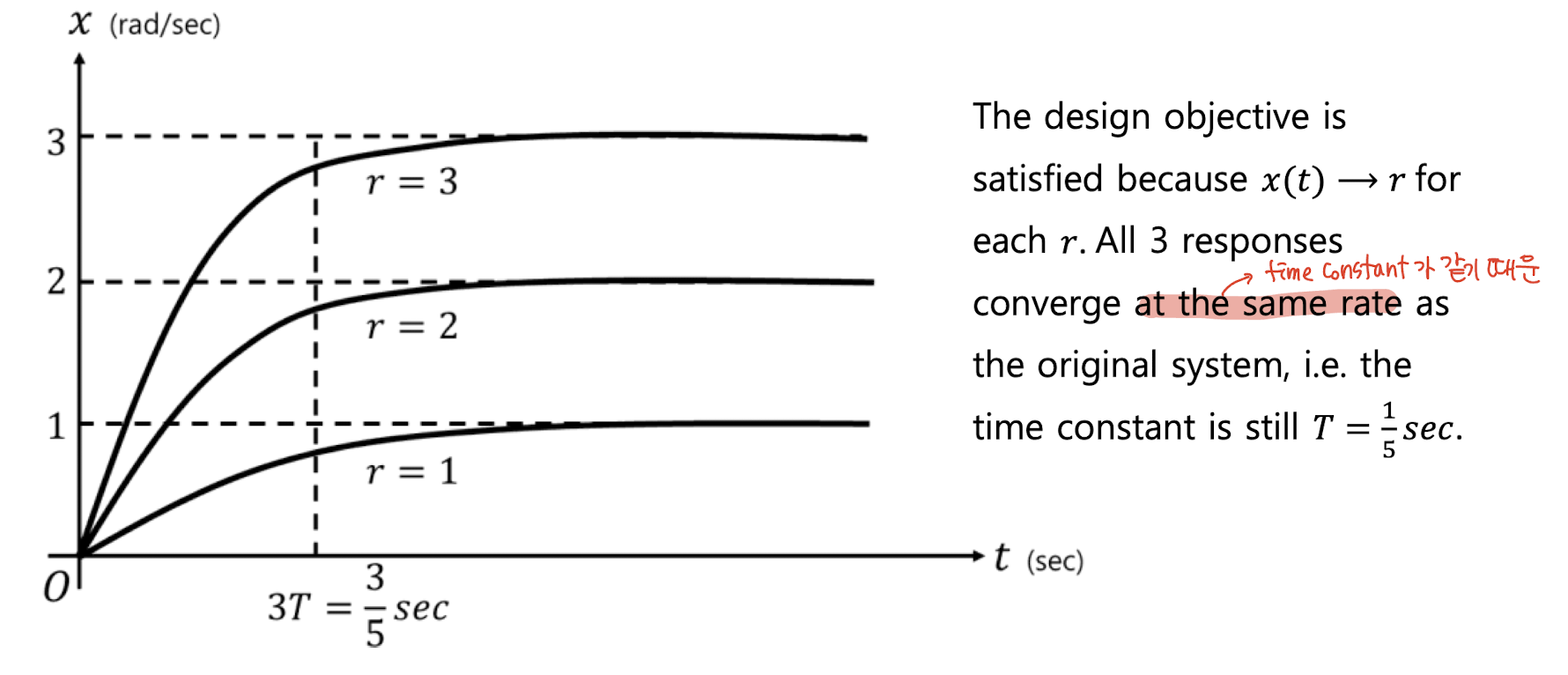
∴u0=25r 해당하는 다이어그램은 다음과 같다.
각각 r=1,2,3일 때의 그래프이다. 같은 비율로 수렴하는 이유는 r만 다르고 T는 같기 때문이다. 3T에 95% 성능을 달성한다.
Open-Loop Disturbance Rejection
Real World 에서는 Wind Gust, Road Slope, Additional Load Torque 등의 disturbance가 있음.
Disturbance를 고려함으로써 설계한 제어기가 외란의 영향을 최소화할 수 있음.
Simple Disturbance 모델은 다음과 같다.
x˙+Ax=B(u+d)

d(t)=dˉ ∀t≥0 이고 system이 stable 하여 steady-state에 수렴한다고 할 때, steady-state value x(t)는 다음과 같이 쓸 수 있다(예제 연결)
x˙+5xss=2(u+dˉ)∴xss=r+52dˉ
r = 1 로 고정하고 dˉ=0,1,2라고 할 때 그래프는 다음과 같이 그려짐
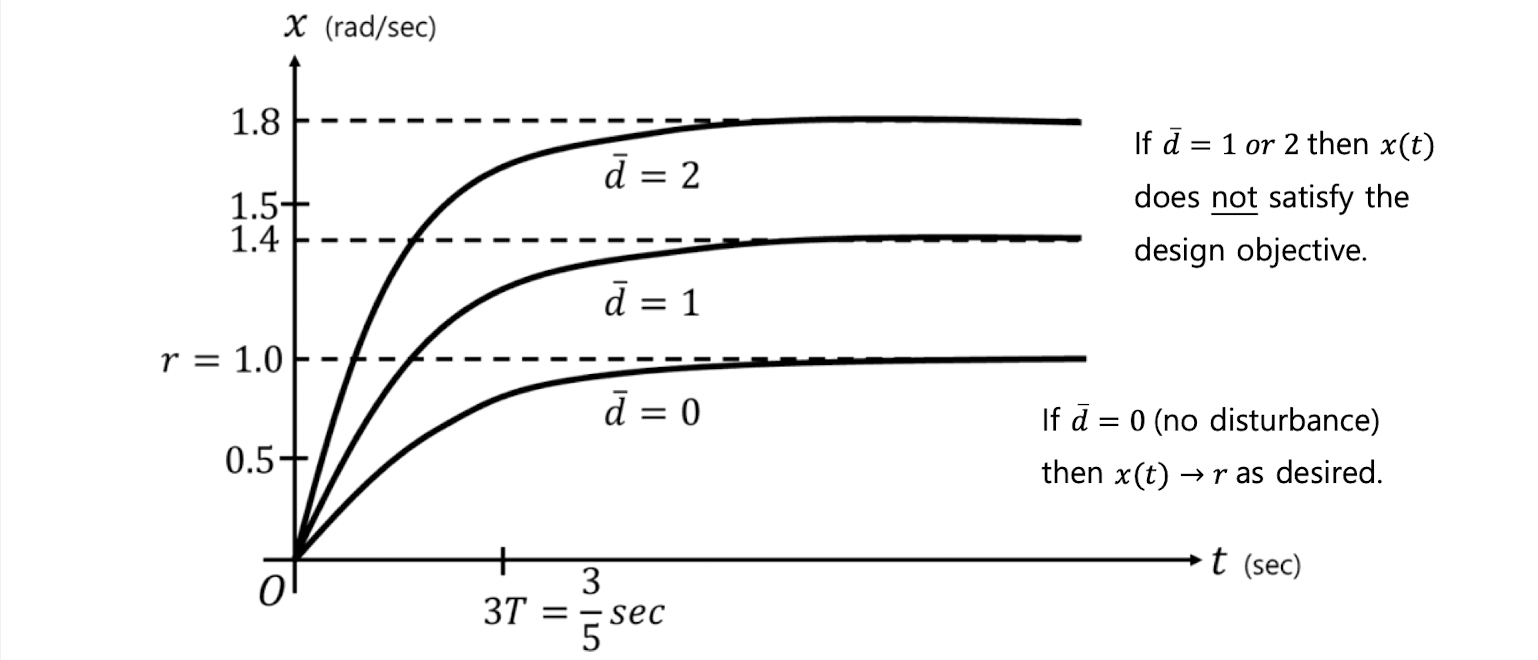
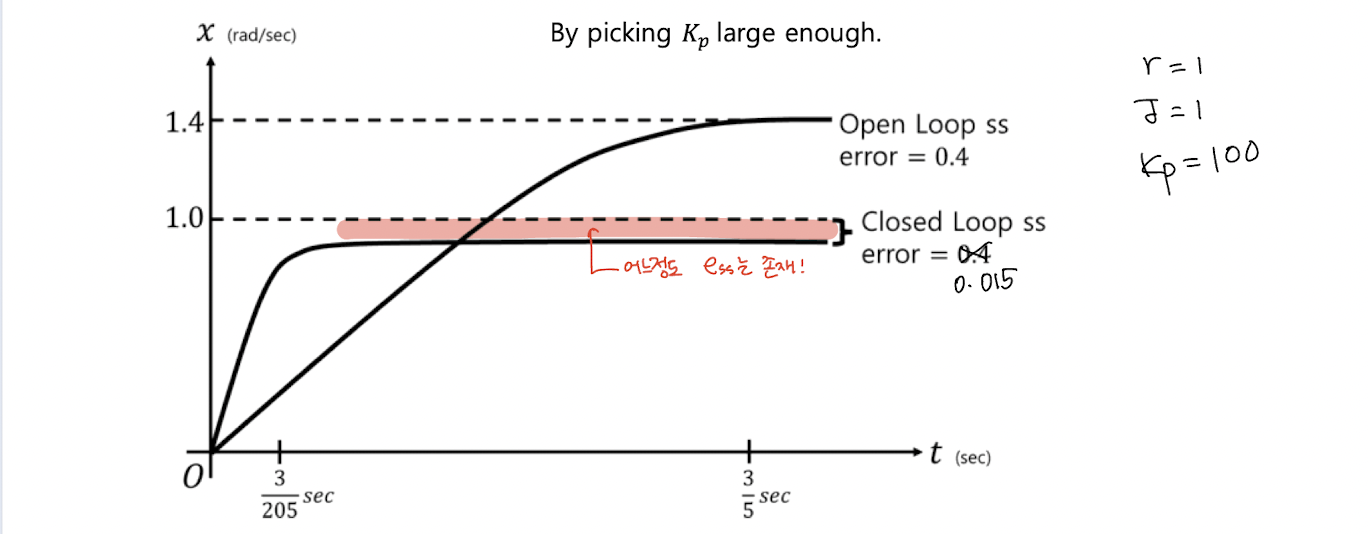
xˉ=1 일 때 xss=1.4→steady−stateerroress=xss−r=0.4
Proportional Control
간단한 closed-loop control strategy는 다음과 같이 input을 설정할 수 있음!
u(t)=Kp(r−x(t))
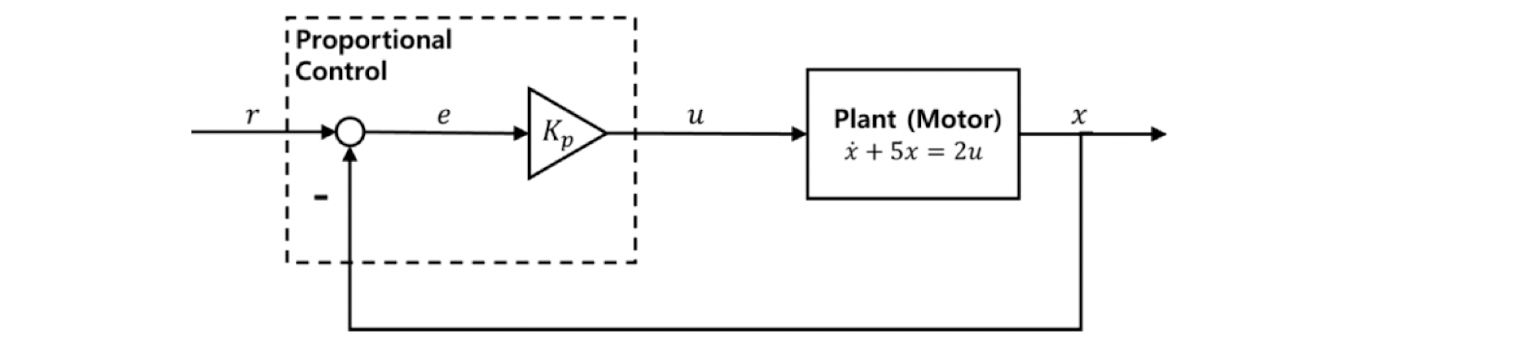
output x가 e에 영향을 줌 → e가 input u에 영향을 줌 → input u가 output x에 영향을 줌 → 반복…
⇒ Closed-Loop Control!
(예제 연결 적용)
x˙+5xss=2uu=Kp(r−x(t))∴x˙+5x=2Kp(r−x)
⇒ x˙+(5+2Kp)x=2Kpr
System Things Check
Time-Constant T
T=a1=5+2Kp1
→ Kp 값으로 응답성을 바꿀 수 있으며, Kp를 올리면 응답성이 올라가서 빠르게 r에 수렴함
Steady-State Value$x_{ss}$
(5+2Kp)xss=2Kpr
∴xss=(5+2Kp)2Kpr=1+2Kp51ress=r−xss=r−1+2Kp51r=2Kp+52Kpr
→ Kp를 적당히 올림으로써 ess를 줄일 수 있음!
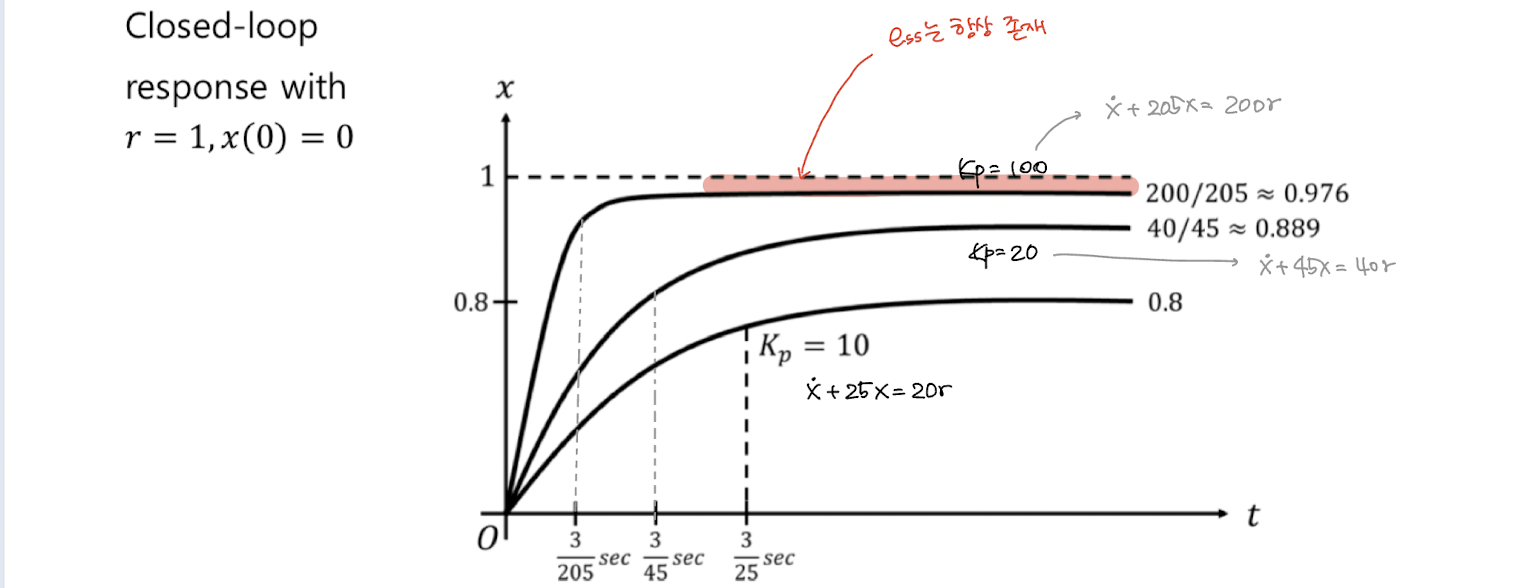
Open-Loop 와 비교
- response time이 빨라짐! → Kp
- ess를 줄일 수는 있지만 항상 존재함.
Proportional Control Disturbance Rejection
Open-Loop & Closed-Loop 의 Disturbance Rejection을 비교해보자!
x˙+5x=2(u+d)u=Kp(r−x(t))
∴x˙+5x=2d+2Kp(r−x)x˙+(5+2Kp)x=2Kpr+2d
disturbance d(t)=dˉ ∀t≥0 일 때 steady-state value와 그 그래프는 다음과 같다.
xss=5+2Kp2Kpr+5+2Kp2dˉ
→ Kp를 높임으로써 disturbance 영향을 줄일 수 있음!
FeedForward Control
Open-loop와 P Control 을 접목시킨 제어방법.
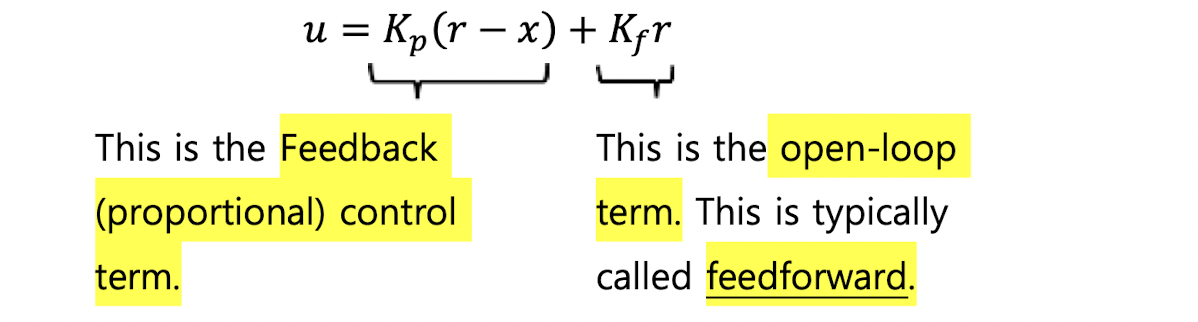
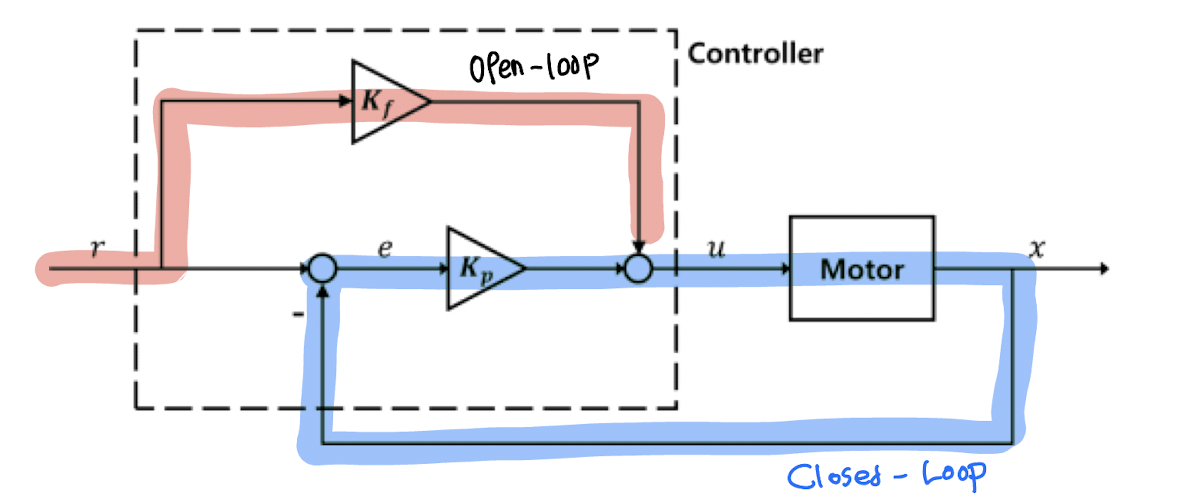
(예제 연결하여 설명)
x˙+5x=2uu=Kp(r−x(t))+Kfr∴x˙+5x=2Kp(r−x)+2Kfrx˙+(5+2Kp)x=2(Kp+Kf)r
Time-Constant T
T=5+2Kp1
Steady-State Error$E_{ss}$
(5+2Kp)xss=2(Kp+Kf)r
xss=5+2Kp2(Kp+Kf)r
ess=r−xss=5+2Kp2−2Kfr
→설계자가 선택한 Kp, Kf로 xss 설정 가능함.
Kp는 T, Kf는 ess 와 연관성이 높음
단, FeedForward Control은 Disturbance Rejection과 연관성은 적음.
