시스템모델링제어 Chapter3. First Order System
Introduction & General Solution
→ 이번 챕터에서는 1차 선형시스템과 General Solution, Free Response, Step Response만 다룸.
Impulse, Sinusoidal Response 는 진동학에서 다룸.
Input의 타입에 따라 솔루션을 설명할 수 있다.
Background Concept
- Stability : 안정성
- Time Constant : 시스템의 응답이 얼마나 따른지를 나타내는 척도
- Steady-State Value\
General Solution
초기 상태 와 임의의 input function u(t) 가 t≥0 에 대하여 주어질 때 1차 ODE를 다음과 같이 쓰고 솔루션을 구할 수 있다.
(*1)
(*2)
앞부분은 Free Response(=I.C Response), 뒤에 적분 부분은 Forced Response
Free Response & Time Constant
(=Inital Condition Response)
1차 ODE에서 일때 forced response가 없으므로 다음과 같이 솔루션을 쓸 수 있음.
이 때 solution의 특성은 a에 의하여 결정됨.
time constant T =
이론적으로 3T(sec)에서 시스템의 95% 성능을 달성함.
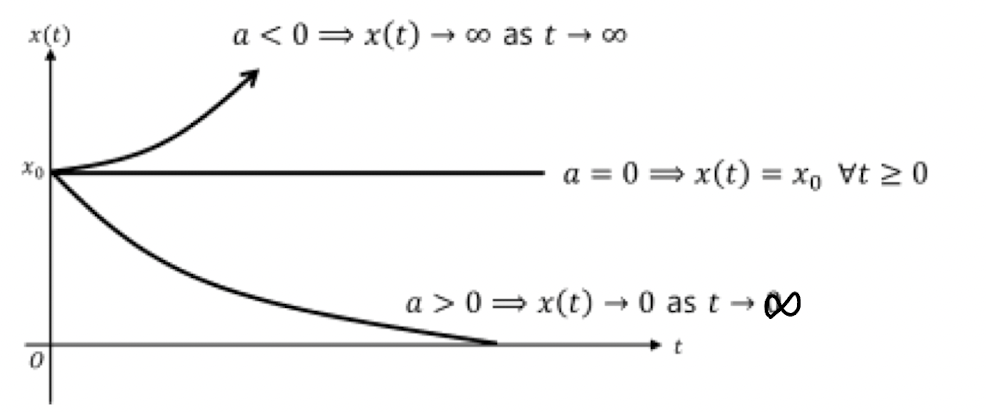
- a > 0 : Free response는 stable함
- a = 0 : Free Response는 marginally stable함
- a < 0 : Free Response는 unstable함 → 논리적으로, 시스템이 음수sec에 시스템의 95%를 달성할 수 없음!
Step Response
step input은 다음과 같은 성격을 가진다.
이 때 는 상수이다. general solution을 이용하여 퍼포먼스를 보여줄 수 있다.
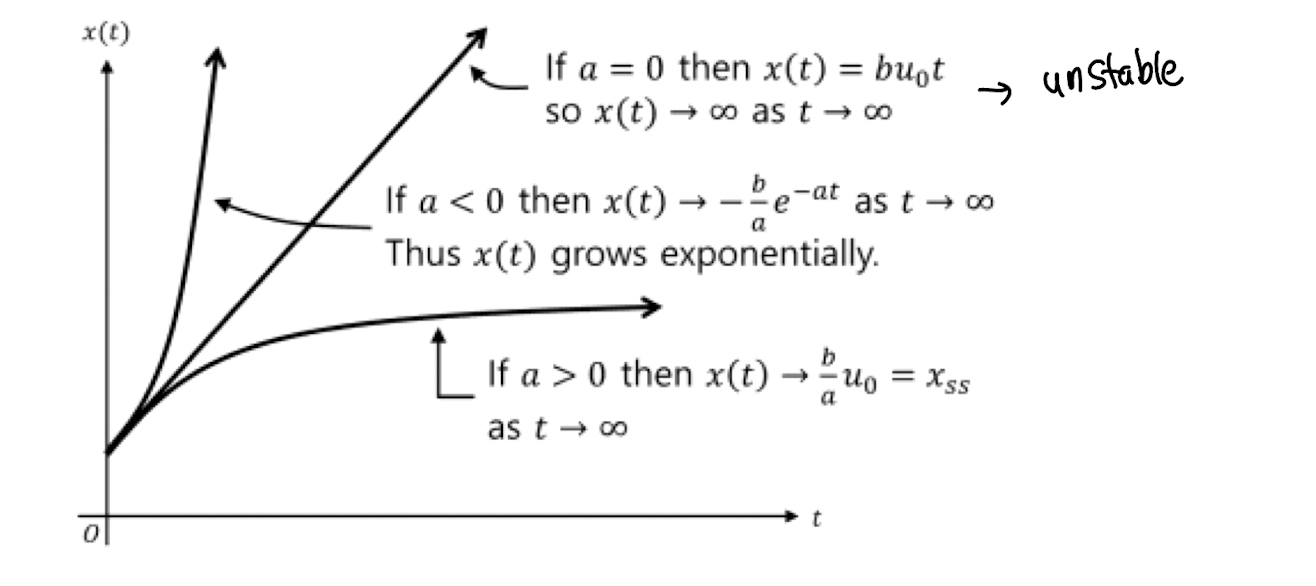
일 때 솔루션은 다음과 같이 일반화할 수 있다.
일 때 하면(steady-state) 이다. 이 때 time constant 이며, 3T(sec)일 때 시스템의 95% 성능을 낼 수 있다!
+) a = 0 case
이 때 만약 a=0 이면 이다. 이때 하면(steady-state) x(t)값은 무한대로 증가하므로 stable할 수 없다.
+) a < 0 case
이 때 만약 a<0이면 이고 하면 x(t)값이 무한대로 exponentially 무한대로 증가하므로 stable 할 수 없다.
Concept : BIBO
Bounded Input-Bounded Output : stable을 구분하는 척도 (time constant는 반응성의 척도임)
Bounded : 어떤 신호 x(t)가 정해진 A보다 작음
만약 어떤 input u(t)가 bounded 하다고 할 때 다음을 만족함.
- 어떤 수 N에 대하여
- 어떤 수 M에 대하여
→ input u(t), output x(t) 모두 bounded 하다.
⇒ 일때 1차 선형시스템은 not BIBO stable하다.
일 때 BIBO stable 하다.
