-
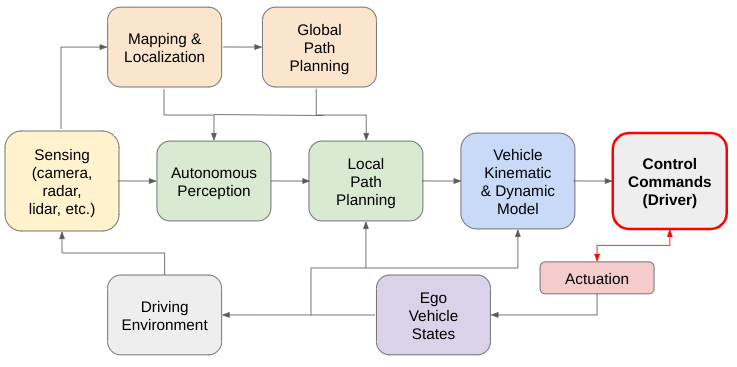
HD Map 제작
* 거리 정보, 경사 등등을 사전에 정제하여 제작 -
Localization 기술
* 정밀지도와 연동하여 차량의 현재 위치 파악 -
Global Path Planning (Route Planning)
* 목적지까지의 경로 찾기 -
Object Detection
* 주변 차량, 보행자, 오토바이, 자전거, 신호등 등을 인식 -
Object Tracking
* 각 오브젝트에 고유 ID 부여하여 추적, 예상되는 주행경로 예측 -
Local Path Planning (Trajectory Planning)
* 다음 이동할 곳으로의 경로 찾기 (충돌 회피 고려), 실시간성 중요 -
Behavior Selector
* 운전 의사결정, 운전 방법, 성향, 행위 결정
-
Local Path Following (Trajectory Following)
* 경로 따라 차량을 운전하기 -
Vehicle Control
* 원하는 대로 차량을 움직이게 만들기
리서치 할 만한 토픽 나열
- 3D object detection & pose estimation
- 동적으로 움직이는 차량, 보행자, 오토바이, 자전거, 신호등 등 예측
- object와 나와의 거리, 방향, 크기 등을 추정
- Object tracking & Motion prediction
- 각 오브젝트에 고유 ID를 부여하여 추적, 예상되는 주행경로 예측
- depth estimation with images
- Local path planning (Trajectory planning)
- 여러개 후보 삭제 등록 반복하며 실시간 작업
자율주행 구현에 필요한 기술들
- 자율주행 알고리즘
- 센싱, 인지, 의사결정
- 자율주행 클라이언트 시스템
- SW: 실시간성, 신뢰성 확보, ROS 취약점 개선
- HW: 병렬 프로세싱, 전력 소모량 최소화, 발열문제 등 성능 향상 필요
- 자율주행 클라우드 플랫폼
- 분산 컴퓨팅: 시뮬레이션 진행 시, HD맵 생성
- 분산 스토리지: 딥러닝 모델 학습/평가 시
First Attempt In Learning