TIL
1.ROS 노드 간 통신하기

마스터: 노드간 통신 관리노드: 실행가능한 프로세스, HW 장치 1 or SW 모듈 1토픽: 센서데이터, 카메라이미지, 명령 등발행자 노드: 토픽 전송하는 주체구독자 노드: 토픽 받는 주체패키지: 노드와 노드 실행을 위한 정보들 (노드, lib, data, config
2.ROS 기본 명령어
roscd: linux cd와 유사, ros 패키지 폴더 이동rosls: linux ls와 유사, ros 패키지 목록 확인rosed: ros 패키지 파일 편집roscp: ros 패키지 파일 복사roscore: 마스터 노드 실행 (master, rosout, parame
3.TODO: 자율주행 요소기술
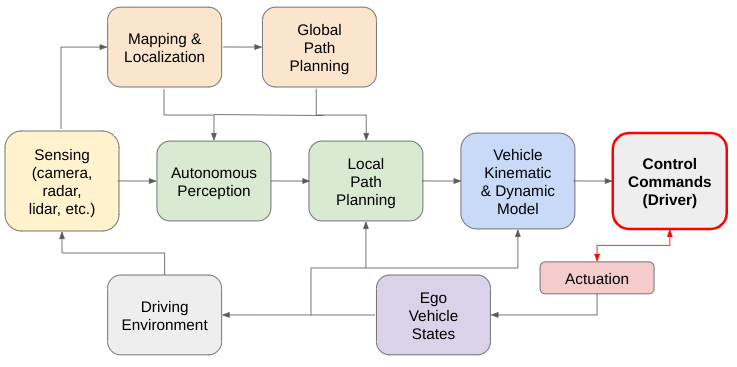
HD Map 제작 \* 거리 정보, 경사 등등을 사전에 정제하여 제작Localization 기술 \* 정밀지도와 연동하여 차량의 현재 위치 파악Global Path Planning (Route Planning) \* 목적지까지의 경로 찾기Object Detecti
4.C++ 영상 데이터 처리 RECAP

트루 컬러 영상의 픽셀 C/C++ 표현 \* RGB 색 성분의 크기를 각각 0~255 범위의 정수로 표현 (char = 1Byte)보통의 경우 2차원 배열을 동적 할당하여 메모리를 사용하고, 사용 후 해제하며, 배열 정적 할당은 stack 영역 공간 확보에 한계가 있
5.OpenCV, 알아두면 쓸모있는 지식들
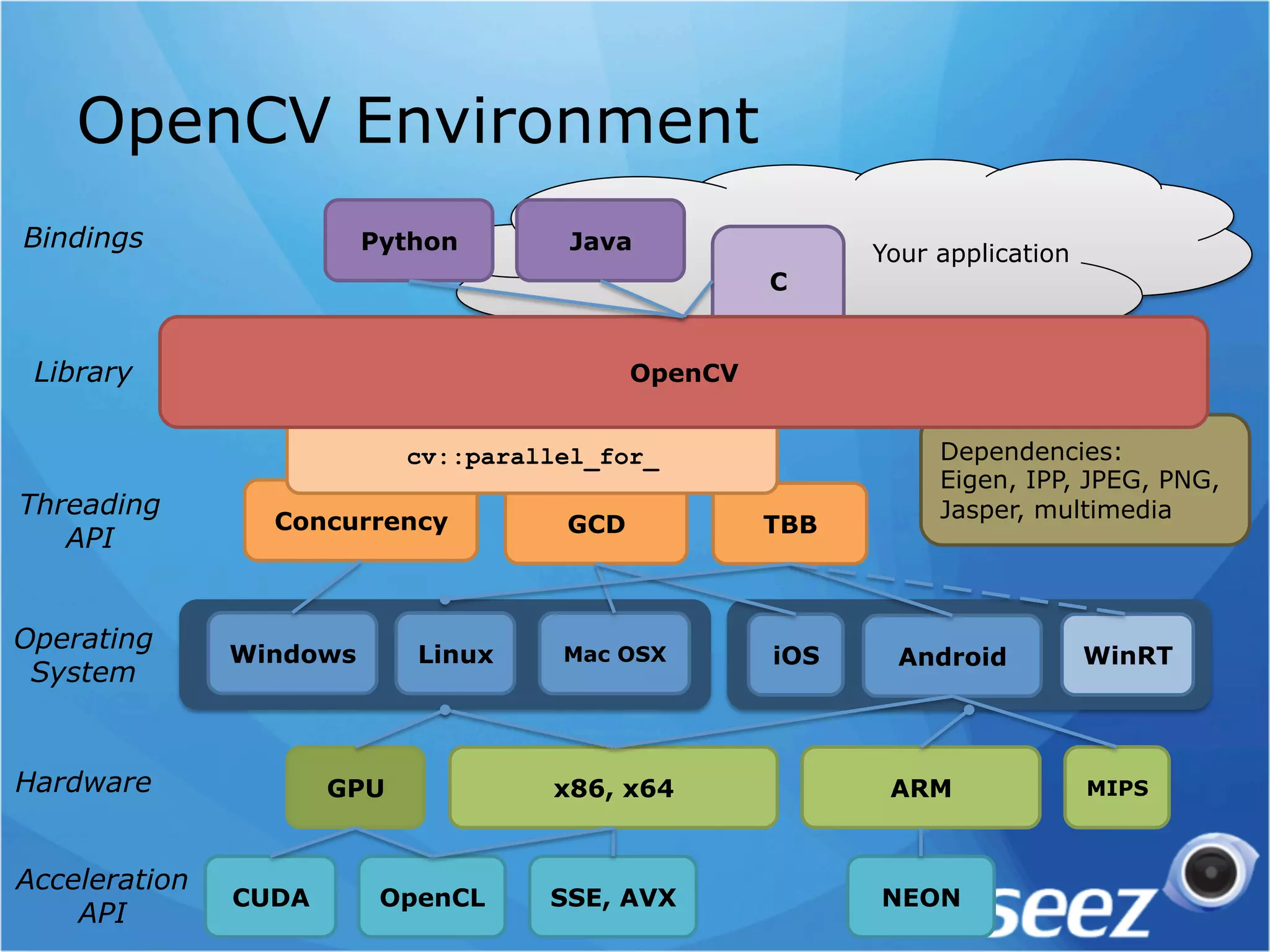
1998: Intel 주도로 개발, 이후 오픈소스화 됨2006: OpenCV 1.0, C로 구현(함수 & 구조체), IplImage 구조체2009: OpenCV 2.0, C++로 전환(클래스), Mat 클래스2015: OpenCV 3.0, OpenCV 프로젝트 구조 개
6.OpenCV 주요 클래스
norm(), dot(), ddot(), cross(), inside() 으로 연산 가능다양한 사칙연산에 대한 연산자 오버로딩과 std::cout 출력을 위한 << 연산자 오버로딩을 지원가로 세로 크기 정보를 표현멤버 변수: width, height멤버 함수
7.영상의 명암비, 히스토그램에 대한 이해
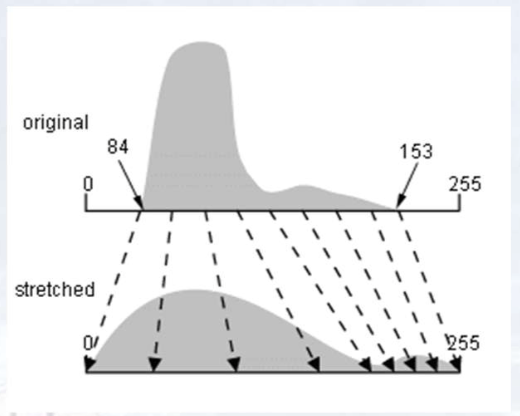
어두운 색을 더 어둡게, 밝은 색을 더 밝게 대비를 주는 것을 명암비 조절이라고 한다.$dst(x, y) = saturate(s \* src(x,y))$소스 이미지에 특정 스케일을 곱해 전체 이미지의 intensity를 변화시켜 색감을 변화시킨다.$s=0.5$ 일 경우
8.OpenCV 필터링 관련 기능들
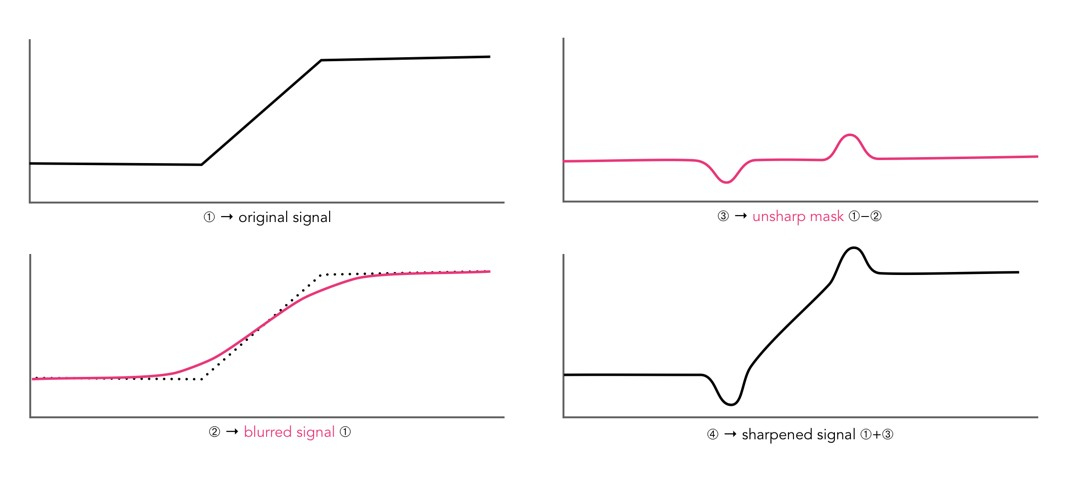
src: 입력 영상dst: 출력 영상ddepth: 원하는 결과 영상의 깊이를 지정. -1이면 src와 같은 깊이를 사용필터링 1번이 아니라, 여러번의 연산을 순차적으로 수행하고 싶을 경우 실수 값을 저장해서 가공할 수 있음kernel: 필터 마스크 행렬. 1채널 실수형
9.OpenCV 특징점 검출과 매칭
크기 불변 특징(Scale invariant feature) 코너의 특징 평탄한 영역, 에지 영역에 비해 변별력이 높음 이동, 회전 변환에 강인 크기 변환에 취약 크기 불변 특징점 스케일 스페이스(scale-space) 또는 이미지 피라미드
10.OpenCV 특징점 검출과 매칭
크기 불변 특징(Scale invariant feature) 코너의 특징 평탄한 영역, 에지 영역에 비해 변별력이 높음 이동, 회전 변환에 강인 크기 변환에 취약 크기 불변 특징점 스케일 스페이스(scale-space) 또는 이미지 피라미드
11.OpenCV 엣지 검출 - (1)

입력 영상은 미세한 노이즈가 포함되어 있기 때문에 엣지를 딸 때, 바로 미분을 적용한다면, 모든 구간에서 높은 엣지 값을 가질 수 있음따라서 가우시안 블러를 적용하여 잡음을 제거한 후 엣지를 검출하는 것이 바람직함전진 차분(forward difference):$\\fr
12.OpenCV 엣지 검출 - (2)
2차원 영상 좌표에서의 직선의 방정식을 파라미터 공간으로 변환하여 직선을 찾는 알고리즘$y=ax+b \\Longleftrightarrow b=-xa+y$축적 배열(accumulation array)직선 성분과 관련된 원소 값을 1씩 증가시키는 배열$y=ax+b$에서 $
13.OpenCV 이진 영상 처리 - (1)
영상 픽셀을 0 또는 255로 만드는 연산배경 vs 객체관심영역 vs 비관심영역src : 입력 영상. 다채널, 8비트 또는 32비트 실수형dst : 출력 영상. src와 동일한 크기, 동일 타입, 같은 채널 수thresh : 사용자 지정 임계값maxval : THRES
14.OpenCV 이진 영상 처리 - (2)
(흰색) 객체를 분할하여 특징을 분석객체 위치 및 크기 정보, ROI 추출, 모양 분석 등레이블링 & 외곽선 검출서로 연결되어 있는 객체 픽셀에 고유한 번호를 지정 (레이블맵)동일 객체에 속한 모든 픽셀에 고유한 번호를 매기는 작업일반적으로 이진 영상에서 수행OpenC
15.OpenCV 템플릿 매칭
입력 영상에서 (작은 크기의) 부분 영상 위치를 찾는 기법템플릿(template): 찾을 대상이 되는 작은 영상템플릿 매칭 수행 과정: 템플릿을 슬라이딩 윈도우로 계속 진행하면서 유사도/비유사도를 구한 후 최대값/최소값 선정image : (입력) 입력 영상, 8비트 또
16.영상의 기하학적 변환
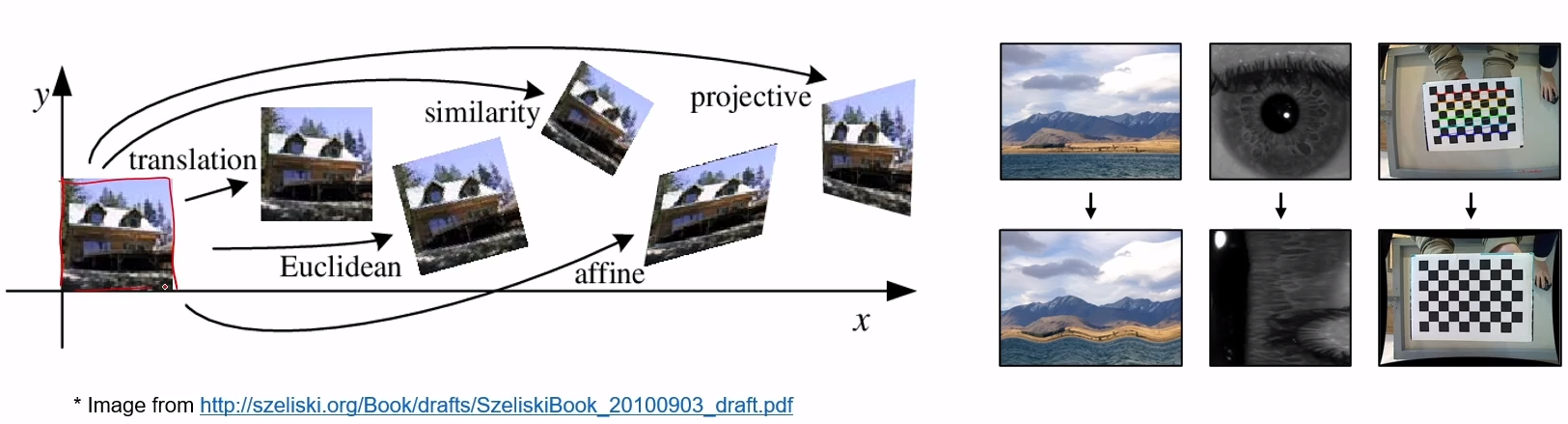
영상을 구성하는 픽셀의 배치 구조를 변경함으로써 전체 영상의 모양을 바꾸는 작업상하좌우 대칭 처리 등 전처리 작업, 두 영상의 같은 객체를 찾는 영상 정합(image registration), 왜곡 제거 등$\\$$\\$translationsheerscaleeuclid
17.영상 위치 정규화
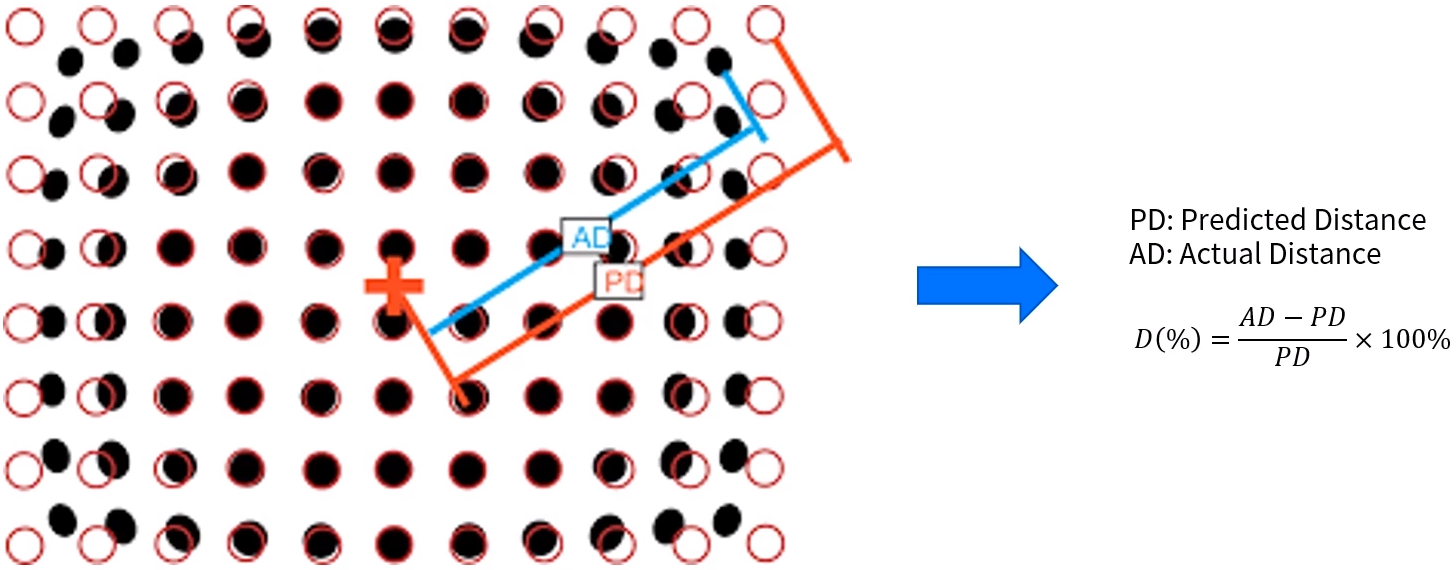
훈련 데이터 영상과 테스트 데이터 영상의 위치, 크기, 회전 등의 요소를 정규화하여 인식 성능을 향상시킬 수 있음숫자 영상의 바운딩 박스를 기준으로 중앙으로 위치 보정무게중심을 중앙에 위치하도록 위치 보정$\\$$\\$자율주행 데브코스 황선규 강사님
18.PID 제어기
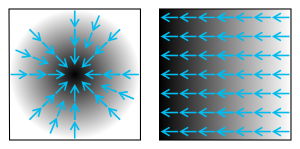
비례, 적분, 미분의 조합으로 적절한 값을 도출하는 기법 비례: Proportional 적분: Integral 미분: Differential 제어 대상의 목표값(desired value)과 출력값(output)과의 차이로 제어값을 계산 주요
19.도커 CLI 명령어 정리
run 10개의 hello-world container를 만들어보자 for ii in {1..10}; do docker run --name hello-world_${ii} hello-world; done $\\$ $\\$ rm: remove containers do
20.Camera Intrinsic Calibration
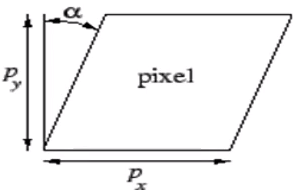
카메라의 Intrinsic Parameter를 정리하면 다음과 같다.$Intrinsic = \\begin{bmatrix}f_x & skew_cf_x & c_x \\0 & f_y & c_y \\ 0 & 0 & 1 \\end{bmatrix}$매트릭스의 각각의 요소에 대해
21.Camera Distortion
완벽한 Pinhole 카메라는 빛이 하나의 점을 통과하지만, 렌즈는 크기를 가지는 물체이기 때문에 빛이 다르게 굴절된다.렌즈의 표면 상 매끄럽지 않는 부분에서 굴절하는 동안 오차가 발생하기도 한다.빛의 굴절은 이미지 센서에 보이는 이미지를 왜곡한다. ex) 사진 가장