1. 시퀀스(sequence) 데이터
-
시계열 데이터, 시퀀스 데이터는 i.i.d(독립 동등 분포)가 아니라 서로
종속된 데이터이다. -
이러한 데이터를 분석하는 데 사용하는 것이
RNN이다. -
소리, 문자열, 주가 등의 데이터를 시퀀스 데이터로 분류한다.
-
시퀀스 데이터는 순서를 바꾸거나 과거 정보에 손실이 발생하면, 데이터의 확률분포도 바뀌게 된다.
-
과거 정보 또는 앞뒤 맥락 없이 미래를 예측하거나, 문장을 완성하는 건 불가능하다.
-
이전 시퀀스의 정보를 가지고 앞으로 발생할 데이터의 확률분포를 다루기 위해
조건부확률을 이용할 수 있다.
- 결국, 데이터가 있을 때, 인 를 모델링해야 한다.
2. Autoregressive Model
- 조건부확률은 과거의 모든 정보를 사용해,
가변적인데이터를 다룰 수 있는 모델이 필요하다.
- 하지만, 시퀀스 데이터를 분석할 때 과거의 모든 정보들이 필요한 것은 아니다.

-
고정된길이 만큼의 시퀀스만 사용하는 경우 AR() 자기회귀모델(Auto Regressive Model)이라고 부른다. -
는 hyperparameter이기 때문에 문제에 따라 그 값이 다르고, 를 결정할 때 사전지식이 필요하다.
3. Latent Auto Regressive Model
-
만약 시퀀스 데이터를 분석할 때 먼 과거의 정보까지 필요하면 어떻게 할까?
-
위의 경우 해당 포스트에서 배우게 될, RNN의 기본형인
잠재자기회귀모델(Latent Auto Regressive Model)을 사용한다.

-
잠재AR모델은 바로 이전 정보를 제외한 나머지 정보들을 라는 잠재변수로 인코딩해서 활용한다. -
해당 모델은 과거의 모든 데이터를 활용할 수 있고, 고정된 길이의 데이터를 가진고 모델링할 수 있다는 장점이 있다.
-
해당 모델은 잠재변수 를 어떻게 인코딩 해야할 지 정해야 한다.
-
잠재변수 를 신경망을 통해 반복해서 사용하여 시퀀스 데이터의 패턴을 학습하는 모델이 RNN이다.
4. RNN(Recurrent Neural Network)
- 가장 기본적인 RNN 모형은 MLP와 유사하다.
-
과 은 시퀀스와 상관없이
불변인 행렬이다. -
RNN은 이전 순서의 잠재변수와 현재의 입력을 활용해 모델링한다.
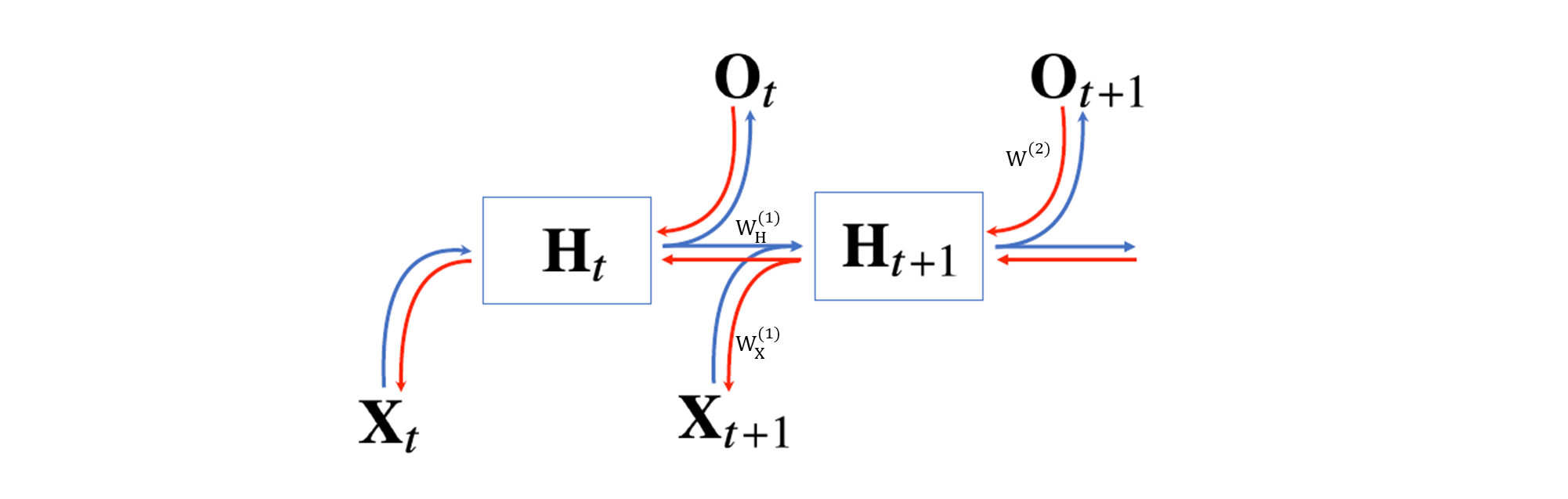
4.1. Forward Propagation

-
잠재변수인 를 복제해 다음 순서의 잠재변수를 인코딩하는데 사용한다.
-
3개의 가중치 행렬 , , 는 에 따라 변하지 않는다.
4.2. BPTT(Back Propagation Through Time)
-
RNN의 역전파는 잠재변수의 연결그래프에 따라 순차적으로 계산한다.
-
마지막 예측까지 모두 이뤄지고 마지막 시점에서의 gradient가 과거까지 전달되는데, 이를 BPTT라 하며 RNN의 역전파 방법이다.
- 잠재변수에는 총 2개의 gradient vector가 들어온다.
- 다음 시점의 잠재변수에 들어오는 gradient vector
- 출력에서 들어오는 gradient vector
- BPTT를 통해 RNN의 에 대해 미분을 계산하면 아래와 같다.
-
RNN의 손실함수는 모든 시점에서의 손실함수를 구한 뒤, 더한다.
-
, 이다.
- 는 에 영향을 받지만, 는 와 관련이 없다.
-
이제 의 값을 구해보자.
-
이고, 단순히 를 상수 취급한다면, 일 것이다.
-
하지만, 에도 가 영향을 끼치므로 무시하면 안된다.
-
은 의 계수로 생각할 수 있다.
-
도 이전과 같은 방법으로 전개가 될 것이다
-
하지만, 시퀀스 길이가 길어질수록 은 불안정해지기 쉽다.
-
만약 의 값들이 1보다 크면 크기가 매우 커지고, 1보다 작으면 크기가 매우 작아지기 때문이다.
-
이것은 기울기 소실(Gradient Vanishing)과 폭주(Exploding)라고 한다.
-
특히
기울기 소실이 일어나면, 미래의 결과를 과거에 반영하기 쉽지 않기 때문에 과거 정보를 유지할 확률이 높다. -
시퀀스 길이가 길어지는 경우 BPTT를 통한 역전파 알고리즘의 계산이 불안정 해지므로 길이를 끊는 것이 필요하다. 즉, 특정 시점부터 미래의 gradient를 전달받지 않는 것이다.
-
이를
truncated BPTT라고 한다. -
하지만 이것은 기울기 소실을 완전히 해결할 수 없다.
-
길이가 긴 시퀀스 데이터의 기울기 소실 문제를 해결하기 위해 등장한 RNN이
LSTM과GRU이다.
