Convex Hull 알고리즘
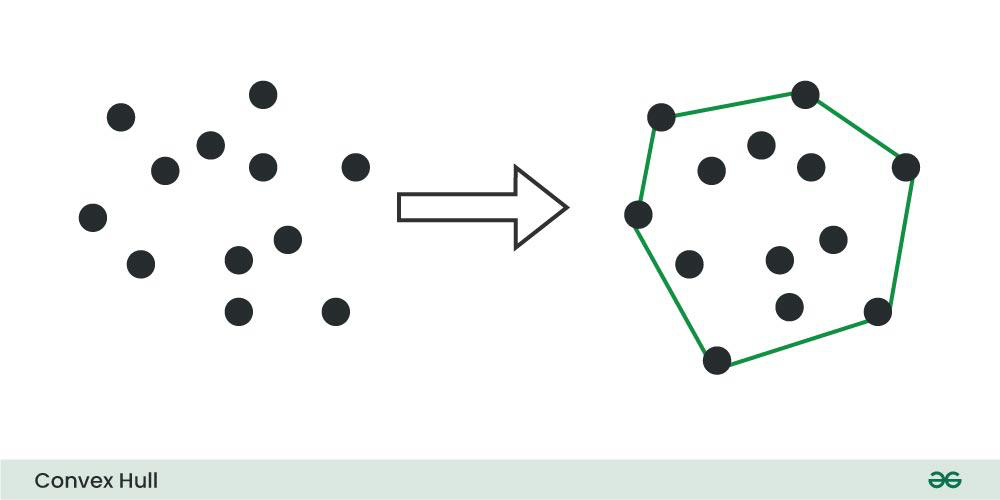
사진 출처: Convex Hull Algorithm
Convex Hull (컨벡스 헐)
개념
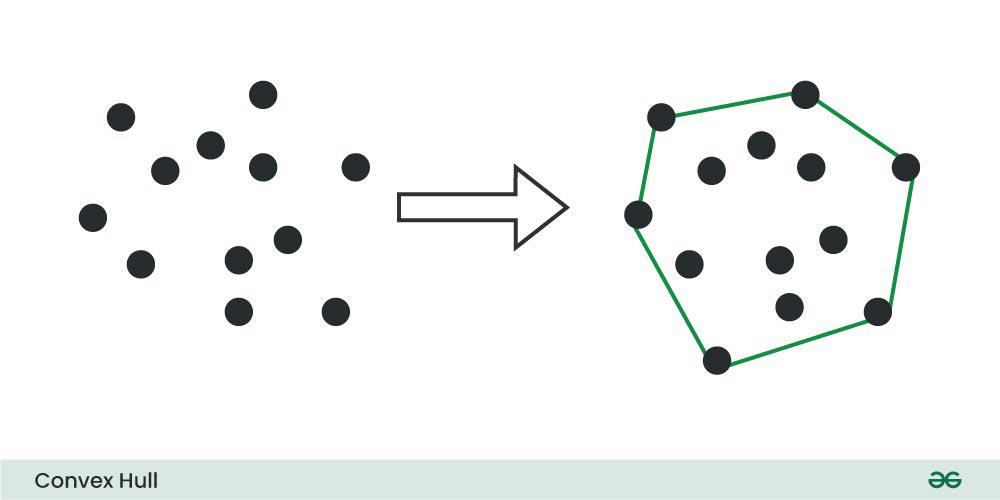
Convex Hull은 2차원 좌표 평면에 존재하는 점들의 집합을 감싸는 최소 크기의 볼록 다각형(Convex Polygon)을 말한다.
특징
- Convex Hull은 점들을 포함하는 영역(내부)과 포함하지 않는 영역(외부)을 나누는 경계 역할을 한다.
- Convex Hull 내부에는 모든 점들이 포함되며, 외부 영역에는 점들이 존재하지 않는다,
- 여러 점 중 일부 점들을 이용해 구성되며, 면적이 최소인 볼록 다각형을 형성한다.
Convex Hull의 필요성
- 2차원 좌표 평면에서 모든 점을 다루는 것은 비효율적입니다. 관심 있는 구간(영역)을 좁히기 위해 Convex Hull을 사용한다.
- 이를 통해 탐색 범위를 줄이고, 필요한 점만 추출할 수 있다.
Convex Hull의 시각적 이해
- 2차원 좌표 평면에 여러 점이 주어진다.
- 이 점들을 모두 포함하는 볼록 다각형을 그린다.
- 볼록 다각형의 각 변은 점과 점을 연결하여 형성됩니다.
- Convex Hull은 외곽 점들만 연결하며, 이 외곽 점들이 Convex Hull의 경계선을 형성한다.
Convex Hull을 구하는 알고리즘
주요 알고리즘
- Convex Hull을 구성하는 점들을 구하는 알고리즘은 여러 가지가 있습니다. 대표적인 방법으로:
- Graham Scan
- 시간 복잡도:
- 점 정렬 등 전처리: O(NlogN)
- Convex Hull 계산: O(N)
- 시간 복잡도:
- Jarvis March (Gift Wrapping)
- Graham Scan
Graham Scan 알고리즘
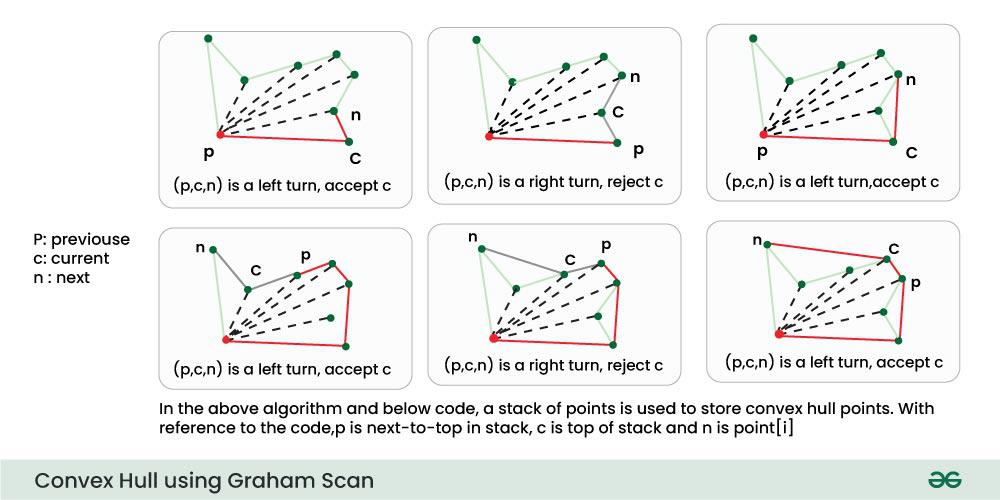
- 주어진 점들의 좌표를 기반으로 볼록 껍질을 구성하는 점들을 효율적으로 계산하는 알고리즘.
- 단계:
- 기준점 선택: 가장 아래쪽(y가 최소) 또는 왼쪽(x가 최소)인 점 선택.
- 각도 기준 정렬: 기준점에서 다른 점들과 이루는 각도에 따라 점들을 정렬.
- Convex Hull 형성:
- 정렬된 점을 따라가며 볼록 껍질을 형성.
- 현재 점이 볼록 다각형의 일부인지 아닌지 확인.

AI/ML Engineer