- STM32CubeIDE에 접속하여 프로젝트를 생성한 뒤에 가지고 있는 stm 보드를 입력하여 선택합니다.
- 이때 필자의 경우 STM32F446RE를 사용하였기에, 아래 사진처럼 설정을 해줍니다.

[Pin 설정]
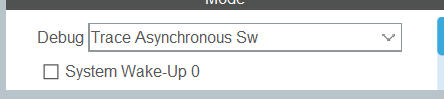
- SYS에서 Debug를 "Trace Asynchronous Sw"로 맞춰줍니다.
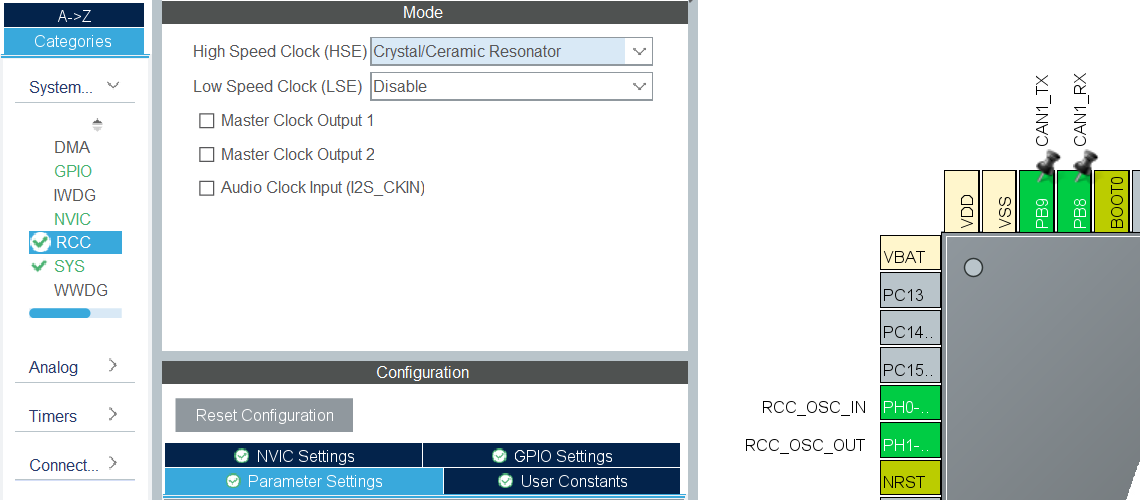
- CAN Pin 설정
- PB8 -> CAN1_RX
- PB9 -> CAN1_TX
- Clock 설정
- 외부 clock을 설정할것이기에, HSE를 설정해줍니다.
[CAN Interrupt, 속도 설정]
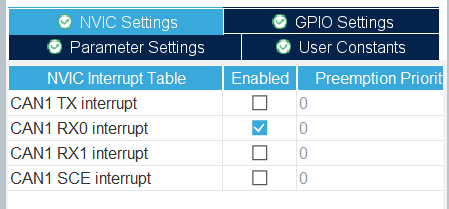
- 아래처럼 CAN 인터럽트 설정을 해줍니다.
- 수신 데이터 저장 FIFO 2개가 있음
- 그 중에서 FIFO0을 사용
- 수신 데이터 저장 FIFO 2개가 있음
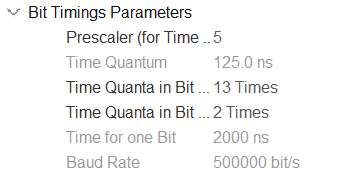
- CAN Prescaler 및 Quantum을 설정해줍니다.
- BaudRate (통신속도)는 500kbps가 됩니다.
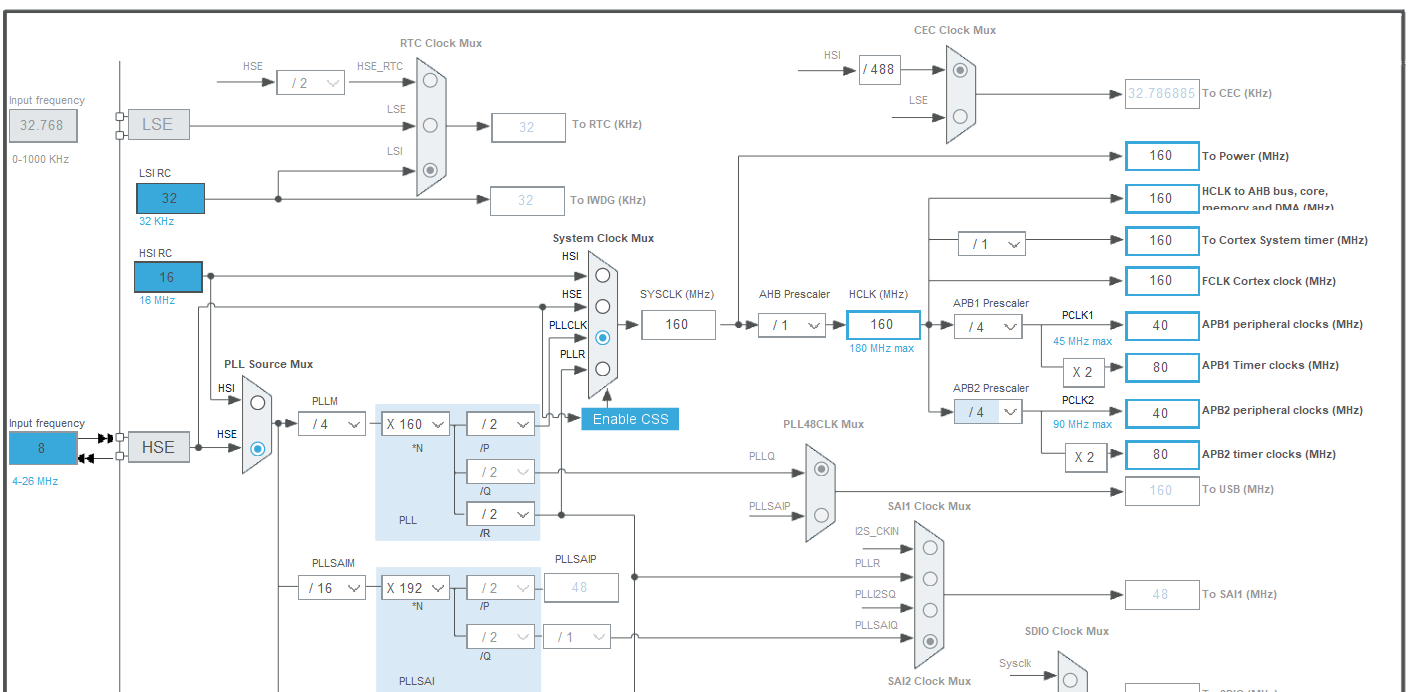
[Clock 설정]
- 아래 사진처럼 clock을 설정해줍니다.

안녕하세요. 주방 자동화 로보틱스 스타트업, Aniai입니다. 펌웨어 관련 블로그 글들을 보고 댓글 남깁니다. 혹시 스타트업 펌웨어 엔지니어 포지션에 관심이 있으시다면 다음 링크를 확인해주시면 감사하겠습니다. https://www.notion.so/Aniai-Inc-99359a1ff62a47f4801ed86e0410e6df