=> vanishing point와 vanishing line을 찾아서 calibration하는 법
의 ray는 vanishing point를 가진다.
3차원에 있는 plane에 대해 알고 싶어서, 그 plane에 대한 vanishing line: 을 조사함
l을 조사하다도면, 3차원에 있는 plane의 normal vector를 구할 수 있다.
image plane 상의 vanishing point와 plane at infity상의 point는 homography = 관계를 가진다.
absolute conic을 image plane으로 보내보면 임을 알 수 있는데, 여기서 를 알고 있다면, 즉 camera의 내부 파라미터를 구할 수 있다. (by cheolesky factorization) 도 구할 수 있고, 도 구할 수 있다.
3차원 공간상 2개의 ray의 각도를 구할 수 있다. (vanishing point를 먼저 구하면)
- 를 구하기위해 를 구해야되고, 를 구하기 위해 임의의 두개 ray 사이의 각이 90인걸 이용한다.
직각인 서로 다른 2개의 plane의 법선 벡터을 이용할 수도 있다.
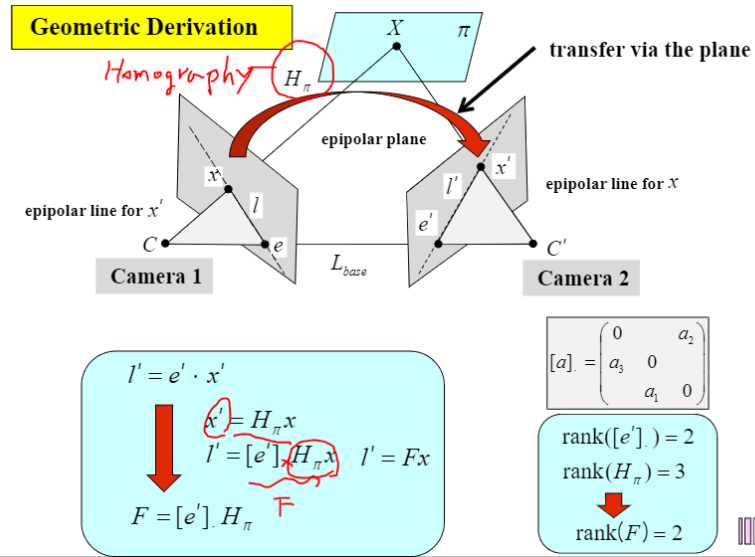
Fundamental Matrix
epipolar geometry: 다른 카메라에 대한 이미지 plane에 맺히는 같은 두 점 사이의 관계를 알고자 하는 geometry
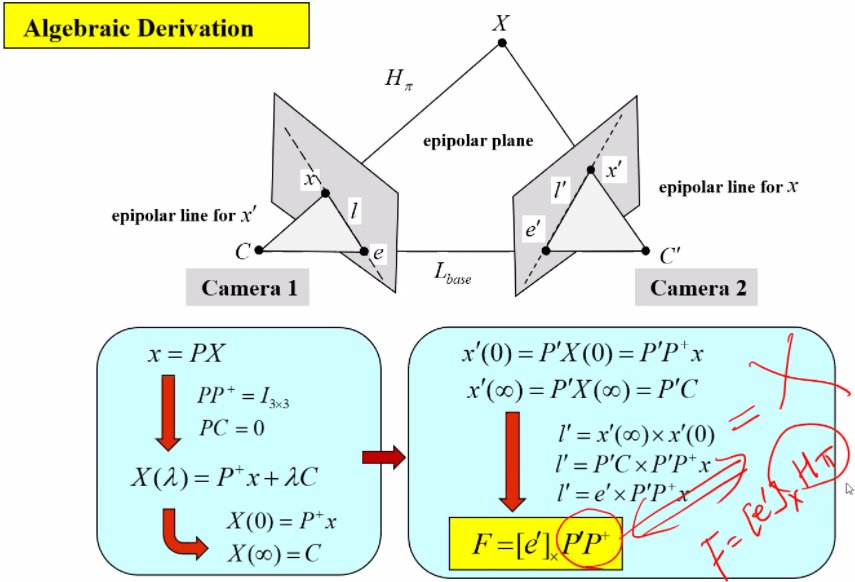
Fundamental matrix 유도
Epipolar constraint를 이용해서 F를 구하는 법 (대응점을 이용해서 homography를 구하는 것 처럼)
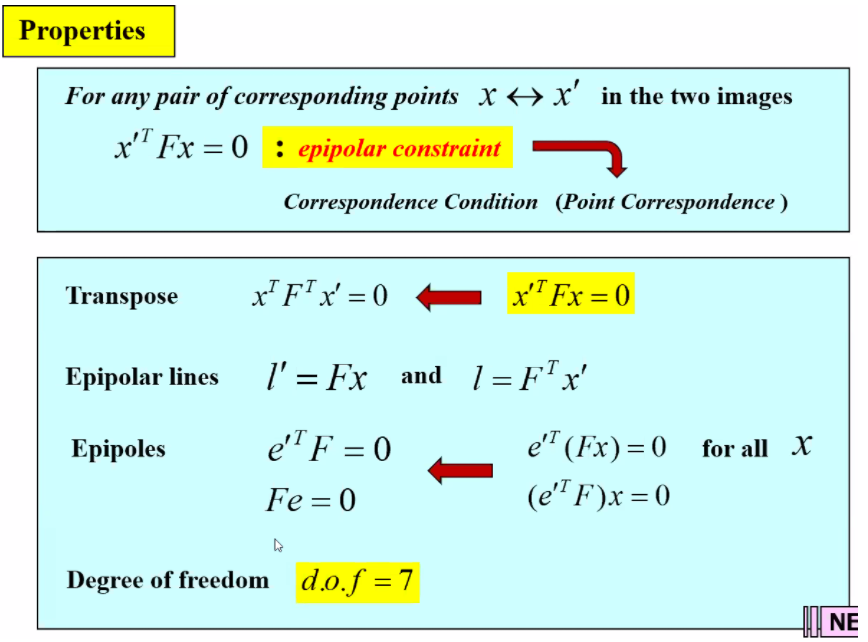
7개의 식으로 F를 구할 수 있다. + determinant가 0인 조건
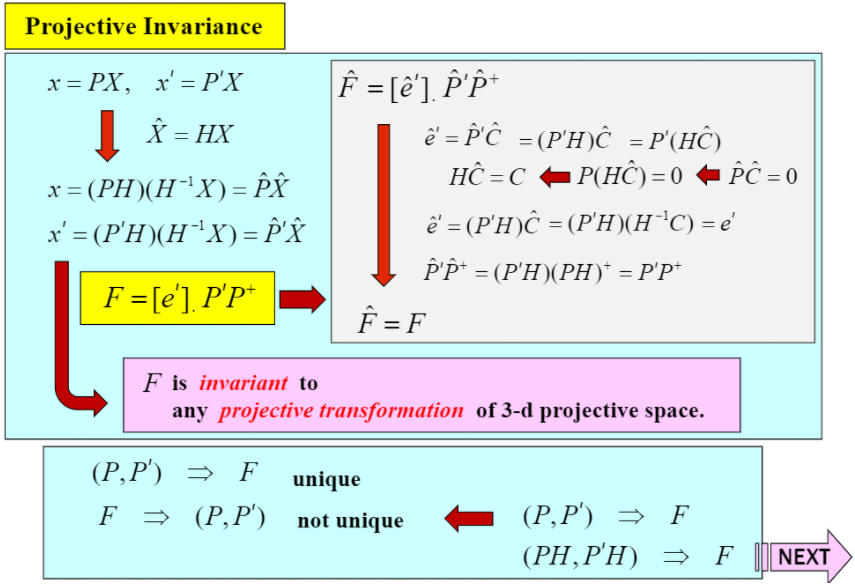
P의 쌍으로는 unique한 F를 구할 순 있지만, F로 부터 P의 쌍을 unique하게 구할 순 없다. (P, P'에 대해 Homography를 한 후에 F를 구한 값과 P, P'을 가지고 그대로 F를 구한 값과 같다.)
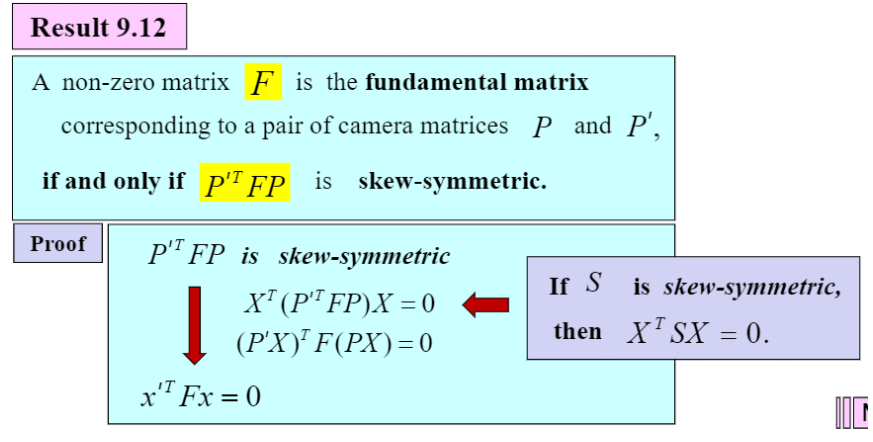
P와 P'을 이용하여 만든 F에 대해 위 행렬은 skew-symmetric이 된다.
