2021_project
1.2021 Project 정리 - preview

옴니휠 로봇 제어 - 제어 공식과 odometry 계산법 찾기저가 카메라를 이용한 고가 카메라 기능 구현 - 카메라 기본 부터 pcl 구현까지 가기VSLAM 테스트 - orb slam이 어떤 것인지 파악해서 쓰기thread와 socket 통신을 이용한 눈 깜빡임 제어
2.0. Omni wheel robot kinematics
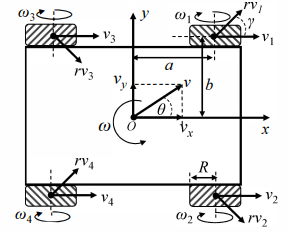
Omniwheel Kinematics위와 같이 보이는 kinematics에서 아래와 같은 공식이 나온다. 이때 w1, w2, w3, w4 값에 대한 것은 어떻게 측정할까? 먼저 우리가 로봇에 명령을 주었을 때, vx, vy, w값을 줄 것이다. 그렇다면 이 값을 갖고
3.1. 저가 카메라에서 고가카메라 기능 구현

WaveShare사의 저가 카메라 IMX219-83 stereo 카메라 모듈을 이용하여 고가 카메라의 기능 중 depth estimation 기능을 구현하려 했다. 비록 성공적이진 못했지만, 이곳에서 제공하는 코드를 분석해보고, 차후에 더 개발해보자. 1. stere
4.2. VSLAM 테스트
VSLAM 테스트는 총 세가지 ORB_SLAM2, OpenVSLAM, RTABMAP을 진행하였다. 관련 영상 링크는 아래에 있다.https://youtu.be/WZDmh8JAfcU위 같은 내용을 진행하기 위해 필요한 세팅에 대해 알아보자.original ORB
5.3. Hanwhabot 만들기
한화봇은 다음과 같이 구성되어 있다. sensor - Intel realsense d435i, YDlidar X4, mpu6050actuator - MD750TMCU - arduino megaboard - Jetson nano내부 코드는 철저히 터틀봇을 모방했다. 아무