ROS2_Basic
1.ROS2 tf tutorial - Introduction to tf2
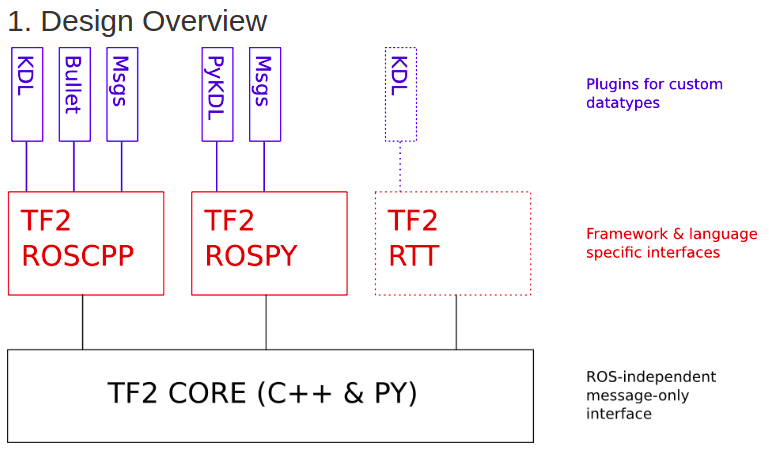
먼저 tf란 무엇인지에 대해 간단히 알아보고 왜 tf2로 가야하는지 알아보자.ros에서 tf란 프레임을 추적할 수 있게 해주는 ros의 라이브러리입니다. 쉽게 예를 들어 보자면, 우리 로봇에게는 카메라와 baselink가 있다고 가정하죠. 둘의 관계를 어떻게 표현할까요
2021년 7월 8일
2.ROS URDF to SDF
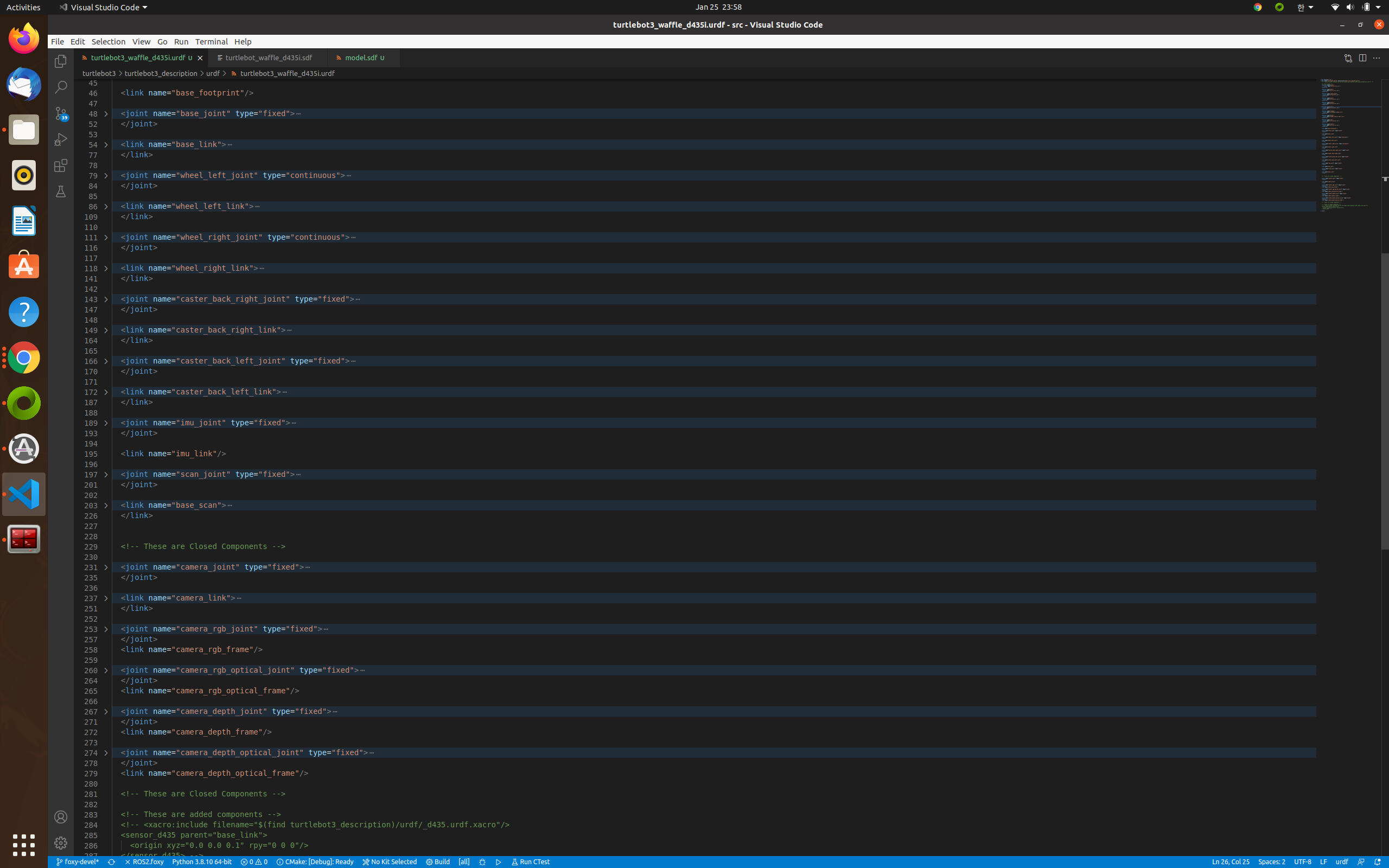
Unified Robot Description Format으로 ROS1에서 자주 사용하던 형식이다.Simulation Description Format으로 urdf와 조금 다른 형식을 취한다.xml urdf to pure urdfpure urdf to sdfrefhtt
2022년 1월 23일
3.ROS2 realsense
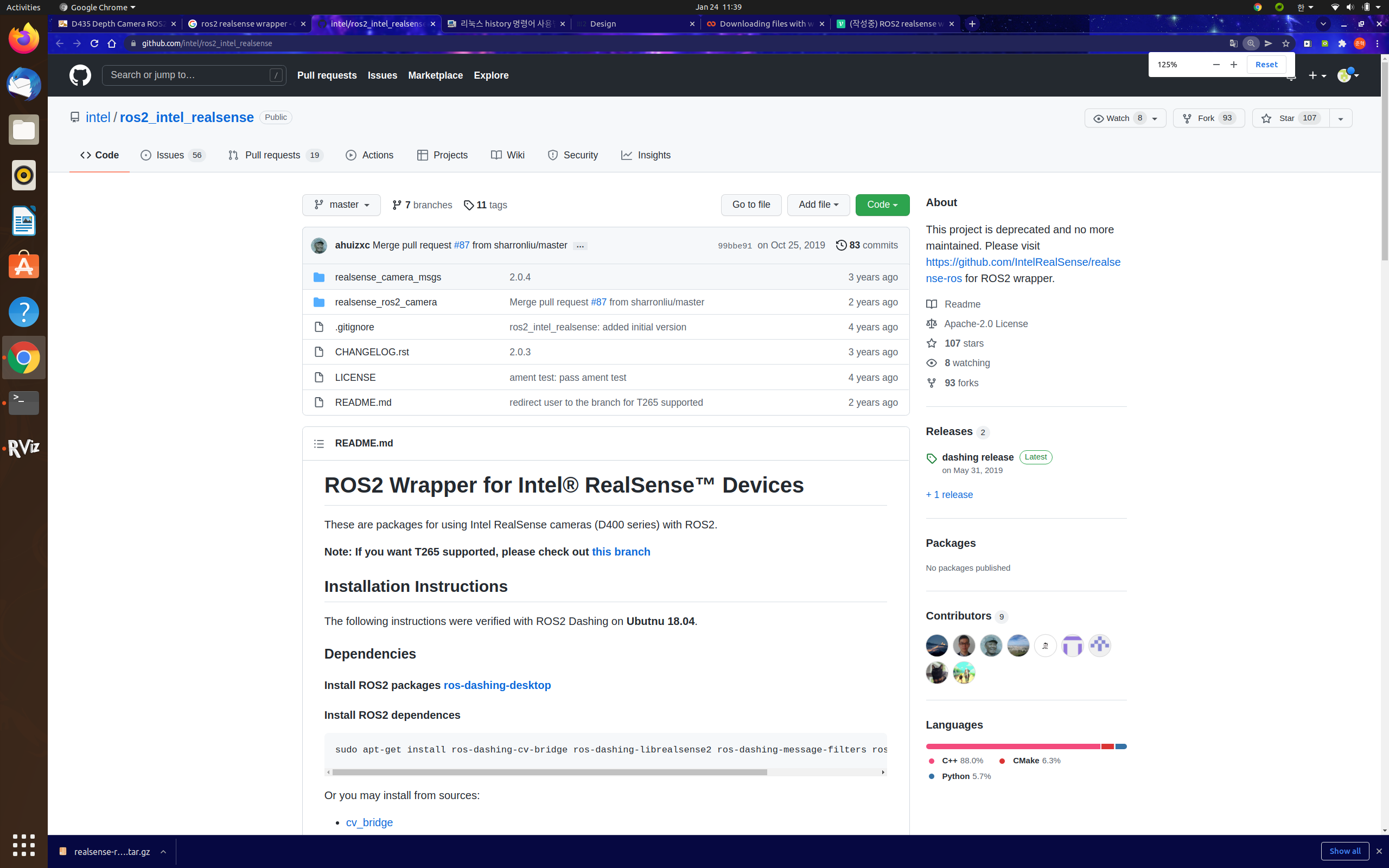
ros2의 realsense wrapper를 다운로드 받아야 한다. 먼저 본인이 현재 쓰고 있는 realsense sdk의 버전을 모른다면 필히 알아보도록 하자. 모른다면 realsense-viewer를 키면 되겠다.검색을 해보니 다음과 같은 링크가 나온다.https&
2022년 1월 24일
4.ROS2 RVIZ Marker
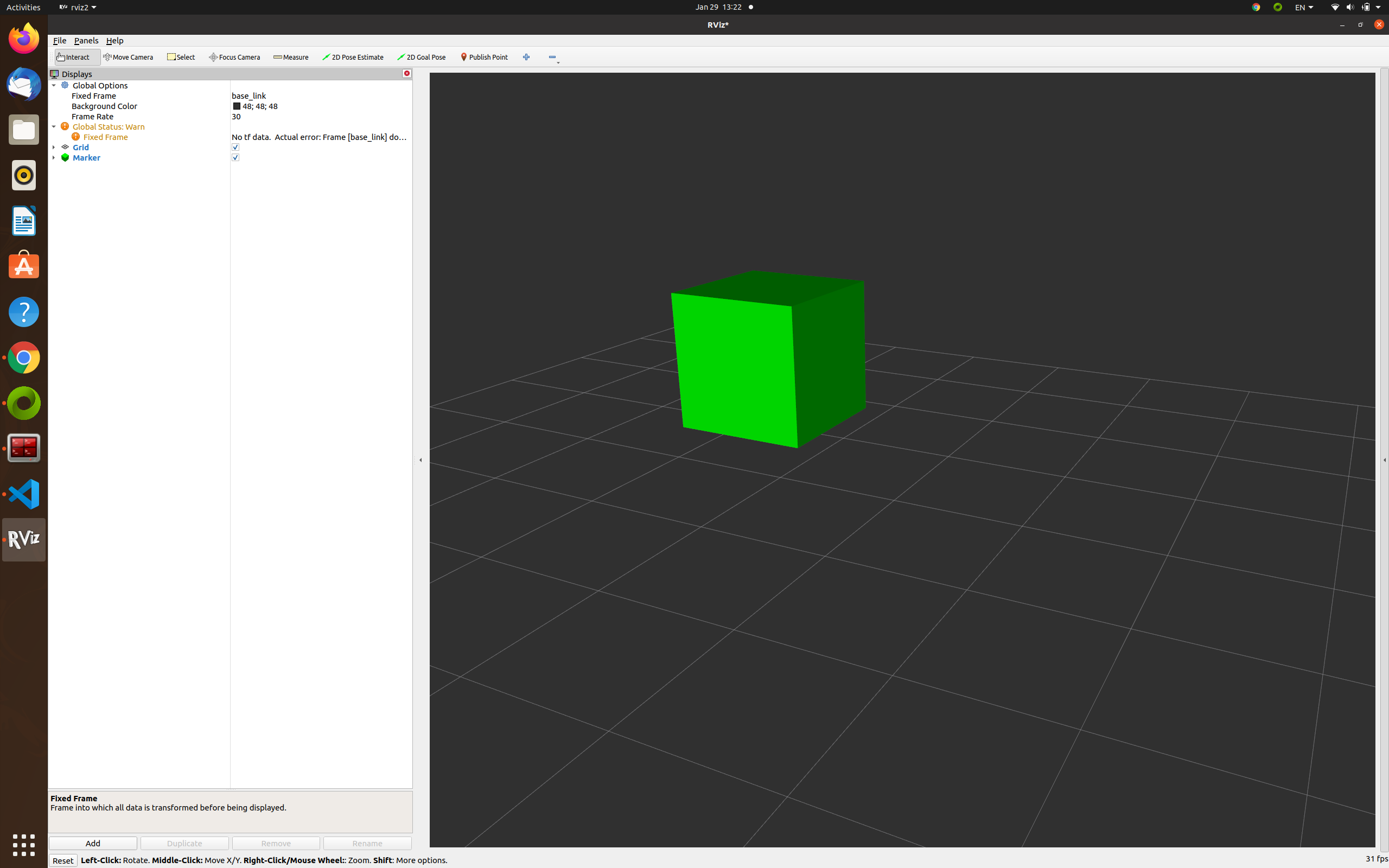
rviz2에서 마커를 본 경우가 많을 것이다. 나중에 사람이나 다른 객체의 이동 데이터를 얻으면 마커를 옮기는 방식으로 표현하고 싶어서 마커를 표시하는 방법을 찾아봤다. 메시지는 다음과 같다.위 메시지를 이용해서 데이터를 pub 하면 된다. ros wiki에서 위 메시
2022년 1월 29일