usb_cam/launch/usb_cam-launch
<launch>
<node name="usb_cam" pkg="usb_cam" type="usb_cam_node" output="screen" >
<param name="video_device" value="/dev/video2" />
<param name="image_width" value="640" />
<param name="image_height" value="480" />
<param name="pixel_format" value="yuyv" />
<param name="camera_frame_id" value="usb_cam" />
<param name="io_method" value="mmap"/>
</node>
<node name="image_view" pkg="image_view" type="image_view" respawn="false" output="screen">
<remap from="image" to="/usb_cam/image_raw"/>
<param name="autosize" value="true" />
</node>
</launch>usb_cam/nodes/usb_cam_node.cpp
line 91
// grab the parameters
node_.param("video_device", video_device_name_, std::string("/dev/video2"));
node_.param("brightness", brightness_, -1); //0-255, -1 "leave alone"
node_.param("contrast", contrast_, -1); //0-255, -1 "leave alone"
node_.param("saturation", saturation_, -1); //0-255, -1 "leave alone"
node_.param("sharpness", sharpness_, -1); //0-255, -1 "leave alone"
// possible values: mmap, read, userptr
node_.param("io_method", io_method_name_, std::string("mmap"));
node_.param("image_width", image_width_, 640);
node_.param("image_height", image_height_, 480);
node_.param("framerate", framerate_, 30);
// possible values: yuyv, uyvy, mjpeg, yuvmono10, rgb24
node_.param("pixel_format", pixel_format_name_, std::string("mjpeg"));
// enable/disable autofocus
node_.param("autofocus", autofocus_, false);
node_.param("focus", focus_, -1); //0-255, -1 "leave alone"
// enable/disable autoexposure
////////////////change here when blacklight///////////////////
node_.param("autoexposure", autoexposure_, true); -> true to false
node_.param("exposure", exposure_, 100); -> 100 to 10
//////////////////////////////////////////////////////////////
node_.param("gain", gain_, -1); //0-100?, -1 "leave alone"
// enable/disable auto white balance temperature
node_.param("auto_white_balance", auto_white_balance_, true);
node_.param("white_balance", white_balance_, 4000);save and catkin_make
//go to catkin_ws
$ catkin_make
$ source devel/setup.bash
// launch usb_cam
$ roslaunch usb_cam usb_cam-test.launch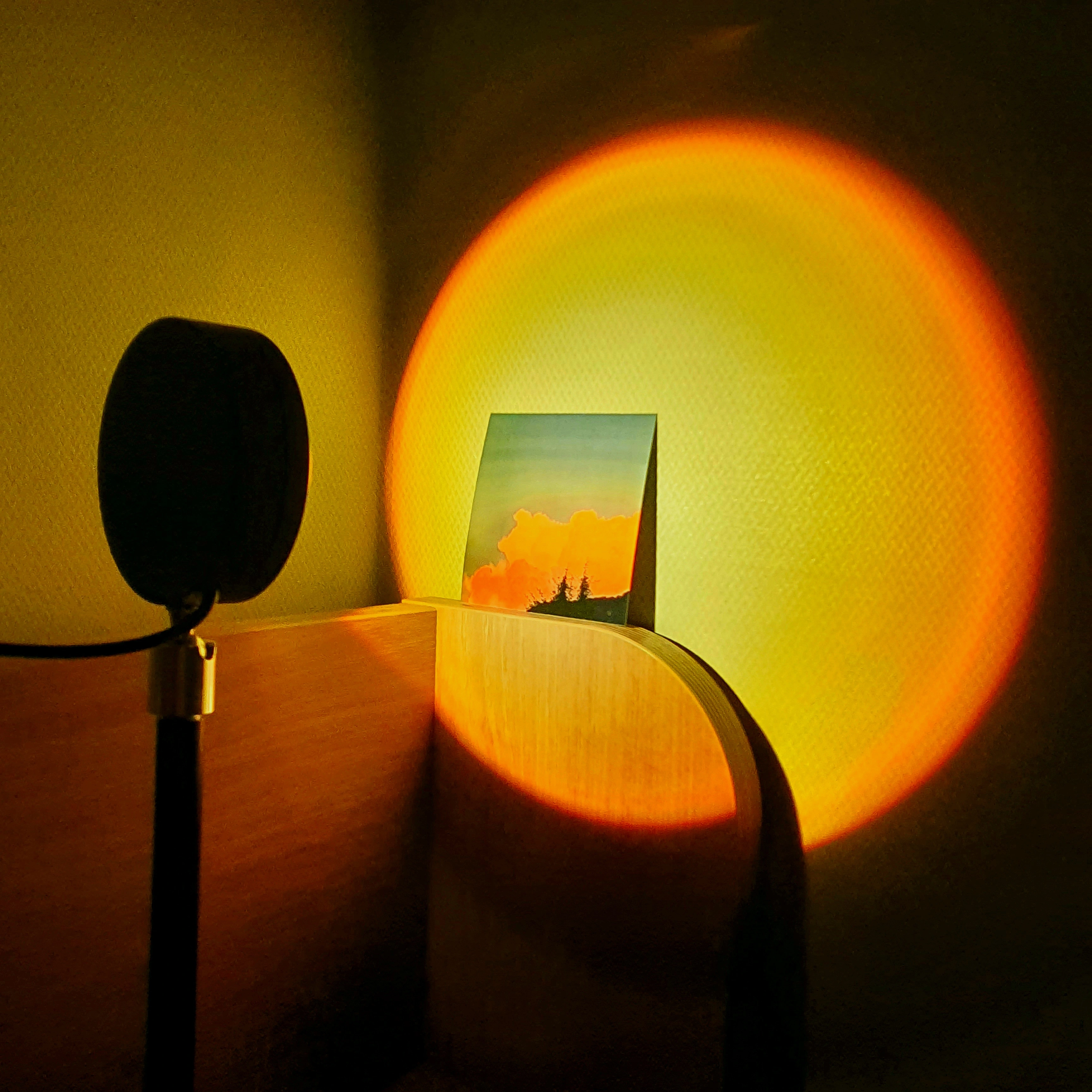
Autonomous driving vision