CAN 통신 (Controller Area Network)
- 차량 내에서 호스트 컴퓨터 없이 마이크로 컨트롤러나 장치들이 서로 통신하기 위해 설계된 표준 통신 규격
non-host bus방식의message-oriented프로토콜OBD-II(차량 진단용 통신 표준의 5대 프로토콜) 中 1높은 신뢰성고온, 충격, 노이즈 같은 외부 요인에 강함반이중 통신 방식 (Half Duplex)⇒ 짧은 메시지 교환하는 고속 응용 시스템 적합
| 연도 | 내용 |
|---|---|
| 1983 | Bosch 사 개발 착수 |
| 1986 | SAE(Society of Automotive Engineers) 에서 공식적 발표 |
| 1987 | Bosch 사 출시 |
| 1991 | Bosch 사 CAN 2.0 발표 |
| 1992 | Mercedes-Benz 사 최초 CAN 적용 차량 생산 |
| 2011 | CAN FD 프로토콜 개발 착수 |
| 2015 | ISO 11898-1 (Classical CAN and CAN FD) 발표 |
non-host bus 방식
- 통신 회선을 Master 장치가 관장하여 전반적인 통신을 제어하는 것이 아닌 회선망에 연결된
모든 단말 장치가 통신 회선을점유하고데이터 송신을 수행하는 방식 - 통신 회선에 실려진 데이터는 회선망에 연결된 모든 단말 장치에
Broadcast
message-oriented 프로토콜
| message oriented protocol | stream oriented protocol | |
|---|---|---|
| 예시 | UDP | TCP |
| 속도 | 전송 속도 빠름 | 전송 속도 느림 |
| 응용 | 데이터 손실보다 속도 중요 → 오디오, 비디오 전송에 적합 | 속도보다 데이터 손실이 중요 → 이메일 시스템에 적합 |
| 송신 형태 | message라고 불리는 연속되지 않은 패킷의 형태로 송신됨 | 데이터가 특정 구조 없이 송신됨 |
| 연결 | 데이터가 셋팅 없이 전송 connectionless | 연결지향적 connection oriented |
| 신뢰성 | 신뢰 불가능한 전송 | 신뢰 가능한 전송 |
| 재전송 | 재전송 X | 손실 데이터 자동적으로 재전송 |
| overhead | LOW overhead | HIGH overhead |
OBD-II (On-Board Diagnostics II)
OBD (On-Board Diagnostics)차의 상태를 진단하고 결과를 알려주는 장치, 발전하여OBD-II라는 표준 진단 시스템으로 진화- 차량의 배출가스 진단과 고장 정보를 하나의 기기로 모든 차량에서 검색할 수 있고, 안전 및 샤시의 고장 정보 확인과 검색이 가능하여 자동차의 소유자와 수리 기술자가 고장을 더 빨리 파악하고 접근하게 함
데이터 전송
1. 우성(dominant) 비트와 열성(recessive) 비트
우성(dominant) 비트: 논리 비트 값0, 전기 신호 값LOW열성(recessive) 비트: 논리 비트 값1, 전기 신호 값HIGH
2. 프레임 충돌 관리
실시간 우선순위 기반우성 비트가 경쟁에서 우위낮은 CAN ID(우성 비트가 많은)를 가진 프레임이 지연 없이먼저 전송높은 CAN ID를 갖는 프레임은 우성 메시지의 전송 후 6비트 전송 시간을 추가로 기다린 후 자동 재전송- 예시 (프레임이
11비트 ID를 갖는 CAN 네트워크)
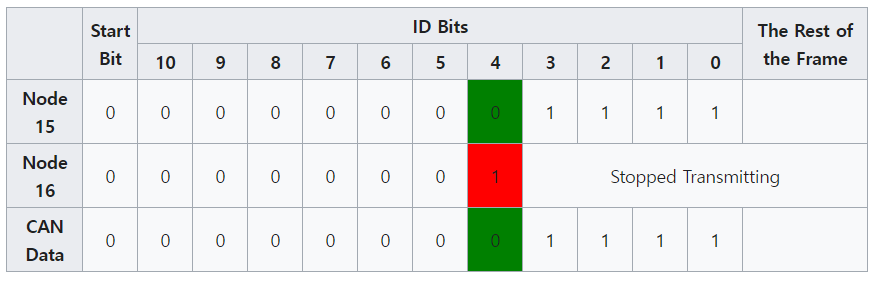
- 노드 ID 15(00000001111)와 16(00000010000)이 동작, 두 노드가 동시에 메시지 전송 상황
- 시작 비트(Start bit) 전송 후, 10번 비트부터 5번 비트까지 충돌 없이 전송 (bit 같아서)
- 4번 비트 전송 시, 노드 16은
1(열성 비트) 전송하고, 노드 15는0(우성 비트) 전송 ⇒ “충돌” - 노드 15
(경쟁에서 이긴 노드)는 다음 비트 계속 전송 - 노드 16
(경쟁에서 진 노드)은 1 전송했으나, 0을 네트워크에서 읽어서충돌 감지⇒ 나머지 메시지 전송 X
3. 전송 속도
40m이하 반경에서1Mbps까지 전송500m이하 반경에서125kbps까지 전송- CAN FD 표준 - 노드 ID 전송 후의 데이터 부분을 노드 ID 전송 속도의 10배 가량 전송 가능
프레임 구조
베이스 프레임 형식
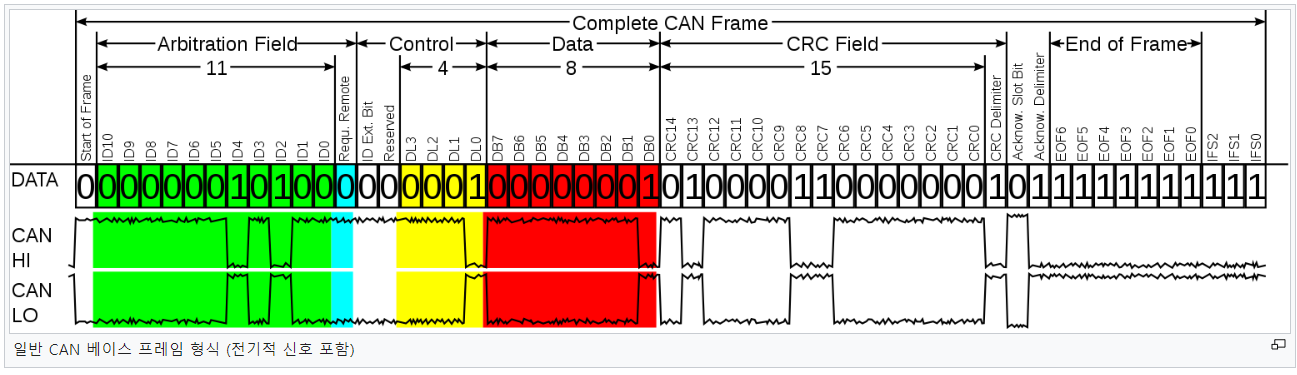
CANH과CAHL신호는차동 방식논리 0: CANL0V/논리 1: CANL2.5Vdominant, 우성 상태(CANH - CANL ≥ 0.9V) ⇒ CANL 0V논리 0recessive, 열성 상태(CANH - CANL < 0.5V) ⇒ CANL 중간 전압 (VCC/2)논리 1
차동 방식 (differential-mode signal)
차동 모드 (Differential Mode)두 신호의 차이로써 나타나는 신호 형태차동 모드 신호 전송 방식 (Differential signaling)서로 반대되는 극성을 갖는 2개의 도선을 이용한 전송 방식, 주로차 신호에 의해 정보를 전송하는 방식을 일컬음
차 신호합 신호개별 신호- 특징
- 전기적 잡음/왜곡 영향 감소
- 최대 전압 스윙 증가
- 간단한 바이어스 구성 및 높은 선형성
- 대략 2배의 소자 필요, 공급 DC 전력 증가
코드 예시
// CAN Protocol in STM32
// 송신
// Header와 data 변수 선언
CAN_TxHeaderTypeDef TxHeader; // header
uint8_t TxData[8]; // 전송된 data
uint32_t TxMailbox; // mailbox
// header 설정
TxHeader.IDE = CAN_ID_STD; // STD : standard ID
TxHeader.StdId = 0x446; // identifier, 최대 11 bit 크기
TxHeader.RTR = CAN_RTR_DATA; // 데이터 frame 전송
TxHeader.DLC = 2; // 2 bytes 길이의 데이터 전송
// data 설정
// 2 bytes 지정
TxData[0] = 50;
TxData[1] = 0xAA;
// transmit
if (HAL_CAN_AddTxMessage(&hcan1, &TxHeader, TxData, &TxMailbox) != HAL_OK)
{
Error_Handler ();
}
// 송신된 message를 받아야 하는지 아닌지 filter를 통하여 구분
// filter configuration
CAN_FilterTypeDef canfilterconfig;
canfilterconfig.FilterActivation = CAN_FILTER_ENABLE; // filter 사용할건지 아닌지
canfilterconfig.FilterBank = 18; // which filter bank to use from the assigned ones
canfilterconfig.FilterFIFOAssignment = CAN_FILTER_FIFO0; // FIFO 0과 FIFO 1 결정
canfilterconfig.FilterIdHigh = 0x446<<5;
canfilterconfig.FilterIdLow = 0;
canfilterconfig.FilterMaskIdHigh = 0x446<<5;
canfilterconfig.FilterMaskIdLow = 0x0000;
canfilterconfig.FilterMode = CAN_FILTERMODE_IDMASK; // MASK_MODE/LIST_MODE 중 결정
canfilterconfig.FilterScale = CAN_FILTERSCALE_32BIT; // 32bit/16bit filter register 결정
canfilterconfig.SlaveStartFilterBank = 20; // how many filters to assign to the CAN1 (master can)
HAL_CAN_ConfigFilter(&hcan1, &canfilterconfig);// CAN Protocol in STM32
// 수신
if (HAL_CAN_ActivateNotification(&hcan1, CAN_IT_RX_FIFO0_MSG_PENDING) != HAL_OK)
{
Error_Handler();
}
// Header와 data 변수 선언
CAN_RxHeaderTypeDef RxHeader; // header
uint8_t RxData[8]; // data
void HAL_CAN_RxFifo0MsgPendingCallback(CAN_HandleTypeDef *hcan) // 수신 기다림
{
if (HAL_CAN_GetRxMessage(hcan, CAN_RX_FIFO0, &RxHeader, RxData) != HAL_OK)
{
Error_Handler();
}
if ((RxHeader.StdId == 0x103))
{
datacheck = 1;
}
}
// 수신된 데이터 확인
if (datacheck)
{
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_5, GPIO_PIN_SET);
}참조
http://koreascience.or.kr/article/CFKO201014258944475.pdf
Differentiate between Message oriented & Stream oriented communications.
