용어
Track
- 현재 Tracking되고 있는 Object의 정보를 관리한다.
Detections
- 현재 이미지에서 탐지한 물체의 Bounding Box와 물체의 class를 가진다.
IoU(Intersection of Union)
- Ground truth bounding box와 탐지된 Bounding box와의 비율을 의미한다.
- 겹쳐진 넓이/전체 넓이
- 교집합/합집합
Unmatched Tracks
- 현재 탐지된 결과와 Track이 할당되지 못한 경우를 의미한다.
- 즉, Track이 남는다.
- 일정 시간이 흐른 뒤에 해당 Track의 id는 삭제된다.
Unmatched Detections
- 현재 탐지된 결과 중 기존의 Track과 일치하는 것이 없다.
- 즉, Detection이 남는다.
- 때문에 새로운 트랙이 생성되어서 Following해야 한다.
Matched Track
- Matching이 제대로 이루어진 경우를 말한다.
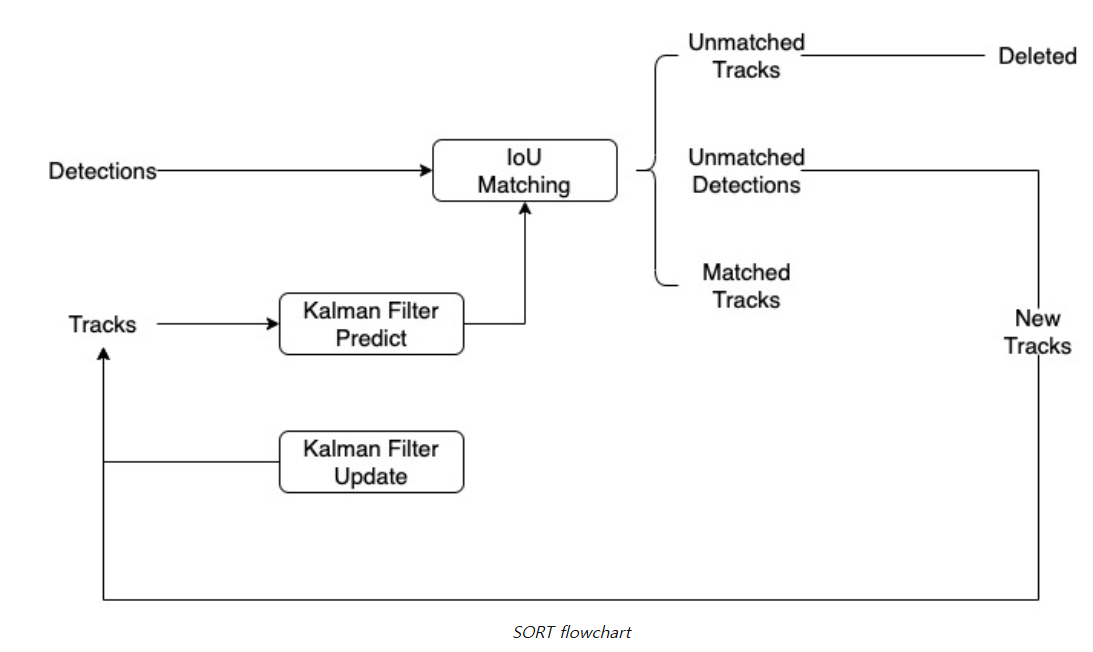
Process
- Detection
- 이미지를 input으로 받아 존재하는 물체에 대해 Bounding box 정보를 받는다.
- Kalman Filter Predict
- 칼만 필터를 통해, 기존의 Track 정보로 부터 다음 frame의 물체의 위치를 예측한다.
- IoU Matching
- Detections 결과와 Predictions의 결과를 기반으로 할당 문제를 해결한다.
- 이 부분에서 헝가리안 알고리즘을 통해 할당을 진행한다.
- Metric으로는 IoU를 사용한다.
- Matching result
- Unmatched Tracks는 일정 시간 이후 삭제한다.
- Unmatched Detections는 새롭게 트랙을 생성하고 Tracks에 담는다.
- Matched Tracks
- Kalman Filter Update
- 현재 가진 Matched Tracks를 다음 frame을 위해 Bounding box를 예측한다.
- Reculsive
- 이 과정을 재귀적으로 진행한다.
문제점
Occulusion(가려짐) 으로 인한 ID Switching Problem에 취약
-> 그래서 'Deep SORT' 관련 내용은 링크에
https://wansook0316.github.io/ds/dl/2021/03/14/computer-vision-17-DeepSort.html
