CV
1.[CV] 캐니 엣지 검출
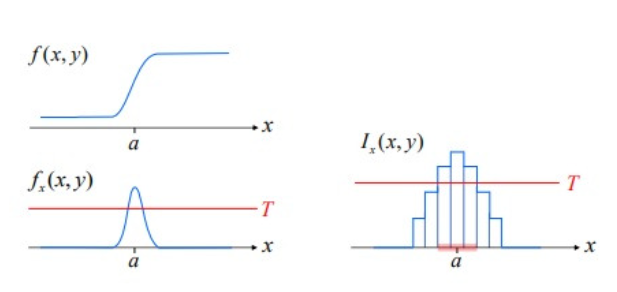
픽셀 값을 미분 (Derivation): 미분 이후 특정 값 T보다 클 때 EDGE로 판단하지만 CV는 행렬의 형태이므로 '연속형'이 아닌 '이산형'이므로 미분 근사 필요가장 오차가 적은 미분법인 중앙 차분 법 사용 (구체적인 수치는 여기에)https://da
2024년 12월 24일
2.[CV] LiDAR 카메라
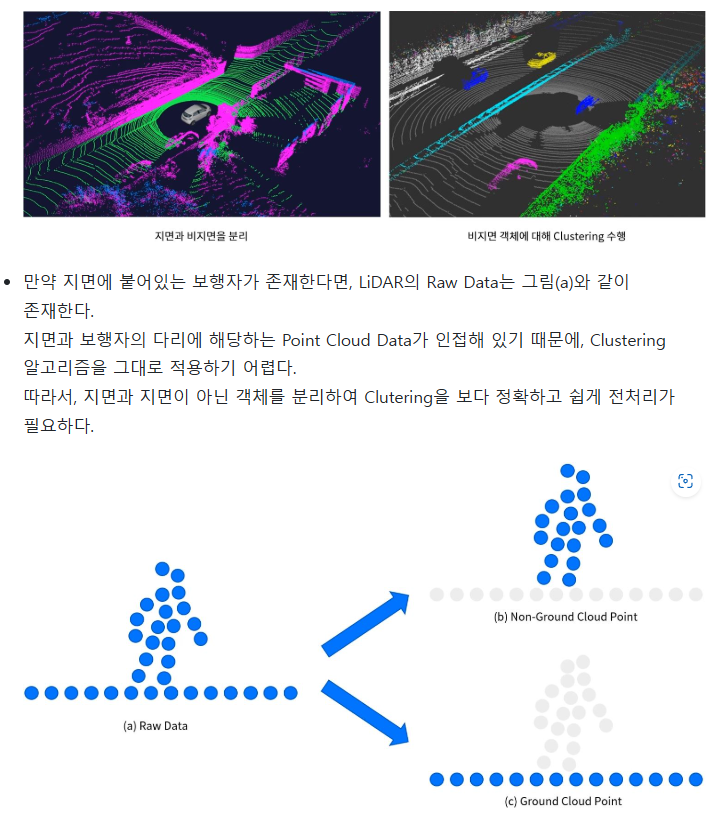
https://velog.io/@noogoolgga/LiDAR-Introduction
2024년 12월 24일
3.[CV] GrabCut 알고리즘

이미지의 관심영역을 포함하는 사각형을 이미지에 그린다.사각형 내부는 전경으로 외부는 배경으로 초기 레이블링표시GMM(가우시한 혼합모델) 각 픽셀의 확률 계산사각형을 기준으로 전경, 배경의 각 색상 분포를 모델링 후 픽셀이 속할 확률을 계산한다.픽셀 분포 학습GMM 이
2024년 12월 24일
4.[CV] SORT, Deep SORT
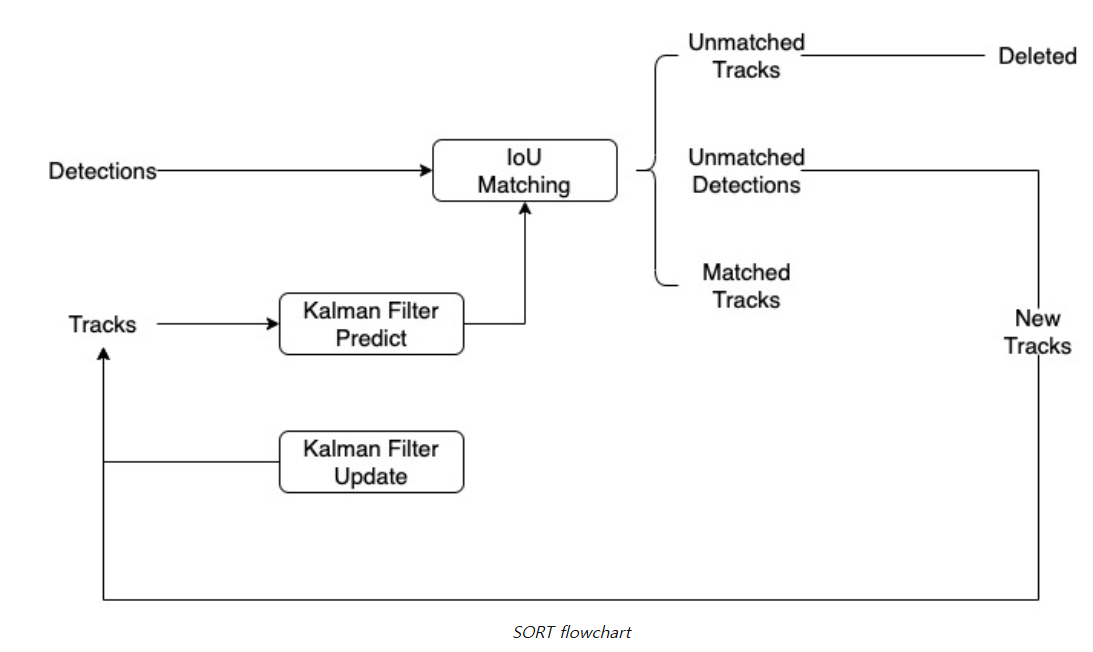
Track현재 Tracking되고 있는 Object의 정보를 관리한다.Detections 현재 이미지에서 탐지한 물체의 Bounding Box와 물체의 class를 가진다.IoU(Intersection of Union)Ground truth bounding box와 탐
2024년 12월 26일