
run_nerf.py 파일 안에 있다.
Input
raw: [N_rand, N_samples, 3+1], NeRF network로 부터 estimation 된 RGB output
z_vals: [N_rand, N_samples] 코드에서는 Integration time이라고 하는데 이게 뭐지...
rays_d: [N_rand, 3] direction of each ray
white_bkgd: 흰색 배경 flag
pytest -> 이건 뭐?
변수 부가 설명
rgb_map: [N_rand, 3] Estimated RGB color of a ray
disp_map: [N_rand
전체 코드
def raw2outputs(raw, z_vals, rays_d, raw_noise_std=0, white_bkgd=False, pytest=False):
"""Transforms model's predictions to semantically meaningful values.
Args:
raw: [num_rays, num_samples along ray, 4]. Prediction from model.
z_vals: [num_rays, num_samples along ray]. Integration time.
rays_d: [num_rays, 3]. Direction of each ray.
Returns:
rgb_map: [num_rays, 3]. Estimated RGB color of a ray.
disp_map: [num_rays]. Disparity map. Inverse of depth map.
acc_map: [num_rays]. Sum of weights along each ray.
weights: [num_rays, num_samples]. Weights assigned to each sampled color.
depth_map: [num_rays]. Estimated distance to object.
"""
raw2alpha = lambda raw, dists, act_fn=F.relu: 1.-torch.exp(-act_fn(raw)*dists)
dists = z_vals[...,1:] - z_vals[...,:-1]
dists = torch.cat([dists, torch.Tensor([1e10]).expand(dists[...,:1].shape)], -1) # [N_rays, N_samples]
dists = dists * torch.norm(rays_d[...,None,:], dim=-1)
rgb = torch.sigmoid(raw[...,:3]) # [N_rays, N_samples, 3]
noise = 0.
if raw_noise_std > 0.:
noise = torch.randn(raw[...,3].shape) * raw_noise_std
# Overwrite randomly sampled data if pytest
if pytest:
np.random.seed(0)
noise = np.random.rand(*list(raw[...,3].shape)) * raw_noise_std
noise = torch.Tensor(noise)
alpha = raw2alpha(raw[...,3] + noise, dists) # [N_rays, N_samples]
# weights = alpha * tf.math.cumprod(1.-alpha + 1e-10, -1, exclusive=True)
weights = alpha * torch.cumprod(torch.cat([torch.ones((alpha.shape[0], 1)), 1.-alpha + 1e-10], -1), -1)[:, :-1]
rgb_map = torch.sum(weights[...,None] * rgb, -2) # [N_rays, 3]
depth_map = torch.sum(weights * z_vals, -1)
disp_map = 1./torch.max(1e-10 * torch.ones_like(depth_map), depth_map / torch.sum(weights, -1))
acc_map = torch.sum(weights, -1)
if white_bkgd:
rgb_map = rgb_map + (1.-acc_map[...,None])
return rgb_map, disp_map, acc_map, weights, depth_map1. alpha, dists 구하기
raw2alpha = lambda raw, dists, act_fn=F.relu: 1.-torch.exp(-act_fn(raw)*dists)
dists = z_vals[...,1:] - z_vals[...,:-1]
dists = torch.cat([dists, torch.Tensor([1e10]).expand(dists[...,:1].shape)], -1) # [N_rays, N_samples]
dists = dists * torch.norm(rays_d[...,None,:], dim=-1)
rgb = torch.sigmoid(raw[...,:3]) # [N_rays, N_samples, 3]
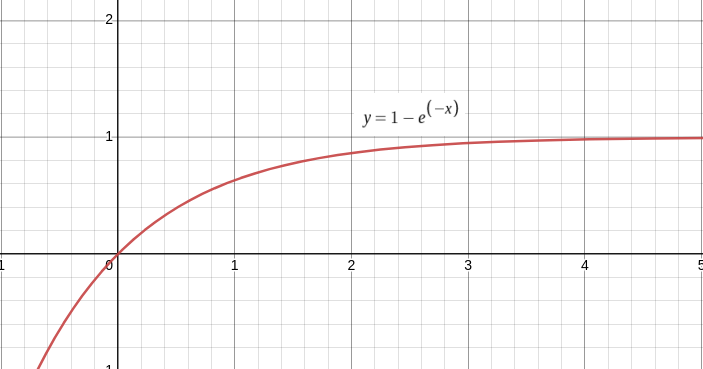
raw2alpha = lambda raw, dists, act_fn=F.relu: 1.-torch.exp(-act_fn(raw)*dists)
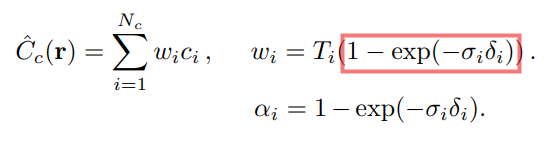
-> 5.2 Hierarchical volume sampling 에서 등장하는 weight term과 alpha term이다.
는 Volume density를, 는 하나의 ray에서 sampling point들 사이의 distance()를 뜻한다.
raw2alpha는 말 그대로 raw data에서 paper의 alpha로 값을 mapping한다.
| 수식 | 코드 |
|---|---|
| raw2alpha = lambda raw, dists, act_fn=F.relu: 1.-torch.exp(-act_fn(raw)*dists) |
- dists = z_vals[...,1:] - z_vals[...,:-1]
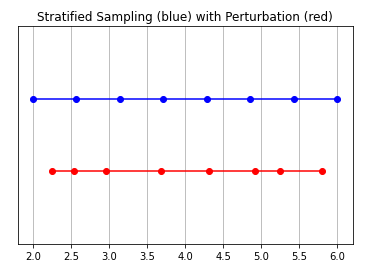
출처: https://towardsdatascience.com/its-nerf-from-nothing-build-a-vanilla-nerf-with-pytorch-7846e4c45666
ray에서 startified sampling을 통해 뽑은 point들 사이의 거리.
뭐 대충 이런 느낌인 것 같다...
-
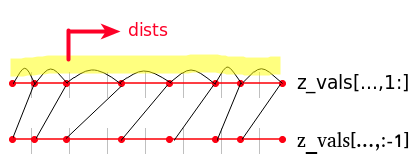
dists = torch.cat([dists, torch.Tensor([1e10]).expand(dists[...,:1].shape)], -1) # [N_rays, N_samples] dists = dists * torch.norm(rays_d[...,None,:], dim=-1)
앞에서 구한 stratified sampling point들 사이의 거리인 dists에서 1e10을 concatenate 해주고, ray의 방향 정보인 rays_d의 norm을 구해서 이를 dists에 곱해준다.
NeRF model의 RGB + volume density estimation 값을 sigmoid를 통해서 0~1 사이로 mapping 해준다. 왜 굳이 또 mapping 해주는거지?rgb = torch.sigmoid(raw[...,:3]) # [N_rays, N_samples, 3]- 그래서 NeRF model의 min, max값을 찍어보았다,
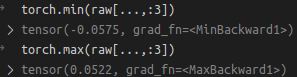
- torch.sigmoid로 mapping 이후 rgb min, max 값
0.5 근처로 mapping 된 것을 확인할 수 있다.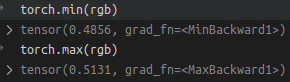
- 그래서 NeRF model의 min, max값을 찍어보았다,
alpha = raw2alpha(raw[...,3] + noise, dists)- raw2alpha function을 통해 alpha 계산.
2. , RGB, Depth, Disp, acc map 구하기.
2.1 Weight식 깔끔하게 정리하기.
우선, Paper에서 는 다음과 같이 정의되어 있다.

이때, alpha는 
와 두 수식이 매우 비슷하게 생기지 않았는가? 이 식을 정리하면 다음과 같다.
이를 log sum 형태로 나타내면,
다음과 같이 나타낼 수 있다.
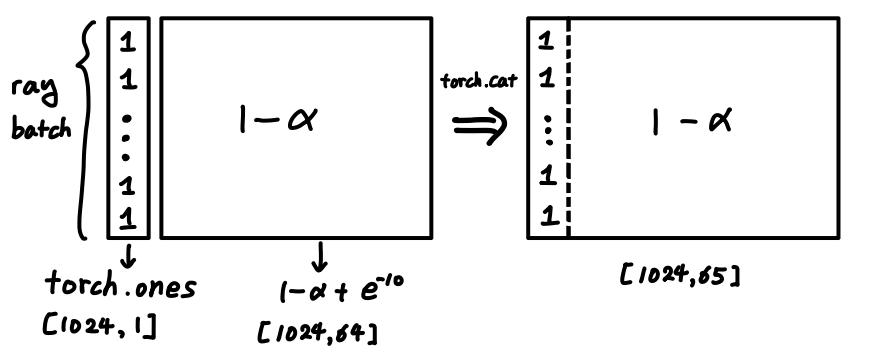
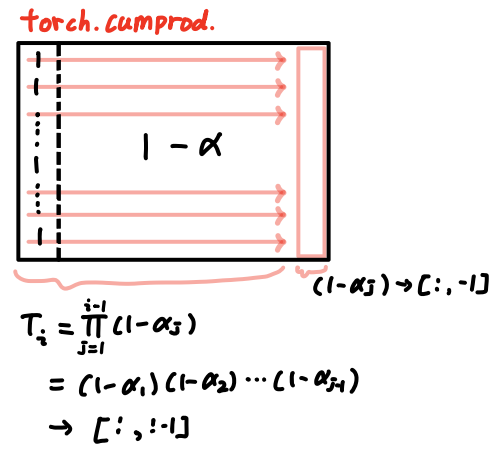
코드에서는 이렇게 alpha term을 변형하여, torch.cumprod를 통해서 Pi 연산을 한다. 최종적으로 를 계산한다.
alpha = raw2alpha(raw[...,3] + noise, dists) # [N_rays, N_samples]
# weights = alpha * tf.math.cumprod(1.-alpha + 1e-10, -1, exclusive=True)
weights = alpha * torch.cumprod(torch.cat([torch.ones((alpha.shape[0], 1)), 1.-alpha + 1e-10], -1), -1)[:, :-1]
rgb_map = torch.sum(weights[...,None] * rgb, -2) # [N_rays, 3]
depth_map = torch.sum(weights * z_vals, -1)
disp_map = 1./torch.max(1e-10 * torch.ones_like(depth_map), depth_map / torch.sum(weights, -1))
acc_map = torch.sum(weights, -1)
if white_bkgd:
rgb_map = rgb_map + (1.-acc_map[...,None])
return rgb_map, disp_map, acc_map, weights, depth_map-
weights = alpha * torch.cumprod(torch.cat([torch.ones((alpha.shape[0], 1)), 1.-alpha + 1e-10], -1), -1)[:, :-1]- 위 코드를 수식으로 나타내면 다음과 같다.
- torch.cumprod 계산을 통해서 weights를 계산한다.
- 1e-10 maybe for prevent Nan?
-
rgb_map = torch.sum(weights[...,None] * rgb, -2) # [N_rays, 3]- 위 코드를 수식으로 나타내면 다음과 같다.
-
depth_map = torch.sum(weights * z_vals, -1)- 그냥 weith에 ray를 startify sampling한 point들에 곱한다.
-
disp_map = 1./torch.max(1e-10 * torch.ones_like(depth_map), depth_map / torch.sum(weights, -1))- disparity map을 구한다. inverse depth라고 생각하면 된다.
-
acc_map = torch.sum(weights, -1)- 이건 뭐지? acc_map의 역할이 뭔지 좀 더 알아봐야겠다.
