1. 다익스트라 알고리즘
-
한 지점에서 다른 특정 지점까지의 최단 경로를 구해야 하는 경우
-
그리디 알고리즘
- 매번 '가장 비용이 적은 노드'를 선택해서 임의의 과정을 반복하기 때문
-
음의 간선이 없을 때 정상적으로 동작한다.
- 음의 간선: 0보다 작은 값을 가지는 간선 (현실 세계에서는 표현될 수 없다.)
-
알고리즘의 원리
1) 출발 노드를 설정한다.
2) 최단 거리 테이블을 초기화한다.
3) 방문하지 않은 노드 중에서 최단 거리가 가장 짧은 노드를 선택한다.
4) 해당 노드를 거쳐 다른 노드로 가는 비용을 계산하여 최단 거리 테이블을 갱신한다.
-
특징
-
최단 경로를 구하는 과정에서 '각 노드에 대한 현재까지의 최단 거리' 정보를 항상 1차원 리스트에 저장하며 리스트를 계속 갱신한다.
-
'방문하지 않은 노드 중에서 현재 최단 거리가 가장 짧은 노드를 확인'해 그 노드에 대하여 4)번 과정을 수행한다는 점에서 그리디라고 볼 수 있다.
-
🟡 한 단계당 하나의 노드에 대한 최단 거리를 확실히 찾는 것
방법 ①: 구현하기는 쉽지만 느리게 동작
<동작원리>
0) 출발 노드에서 출발 노드로의 거리는 0으로 보기 때문에 처음에는 출발 노드가 선택된다.
-
모든 노드로 가는 최단 거리를 '무한'으로 초기화 한다.

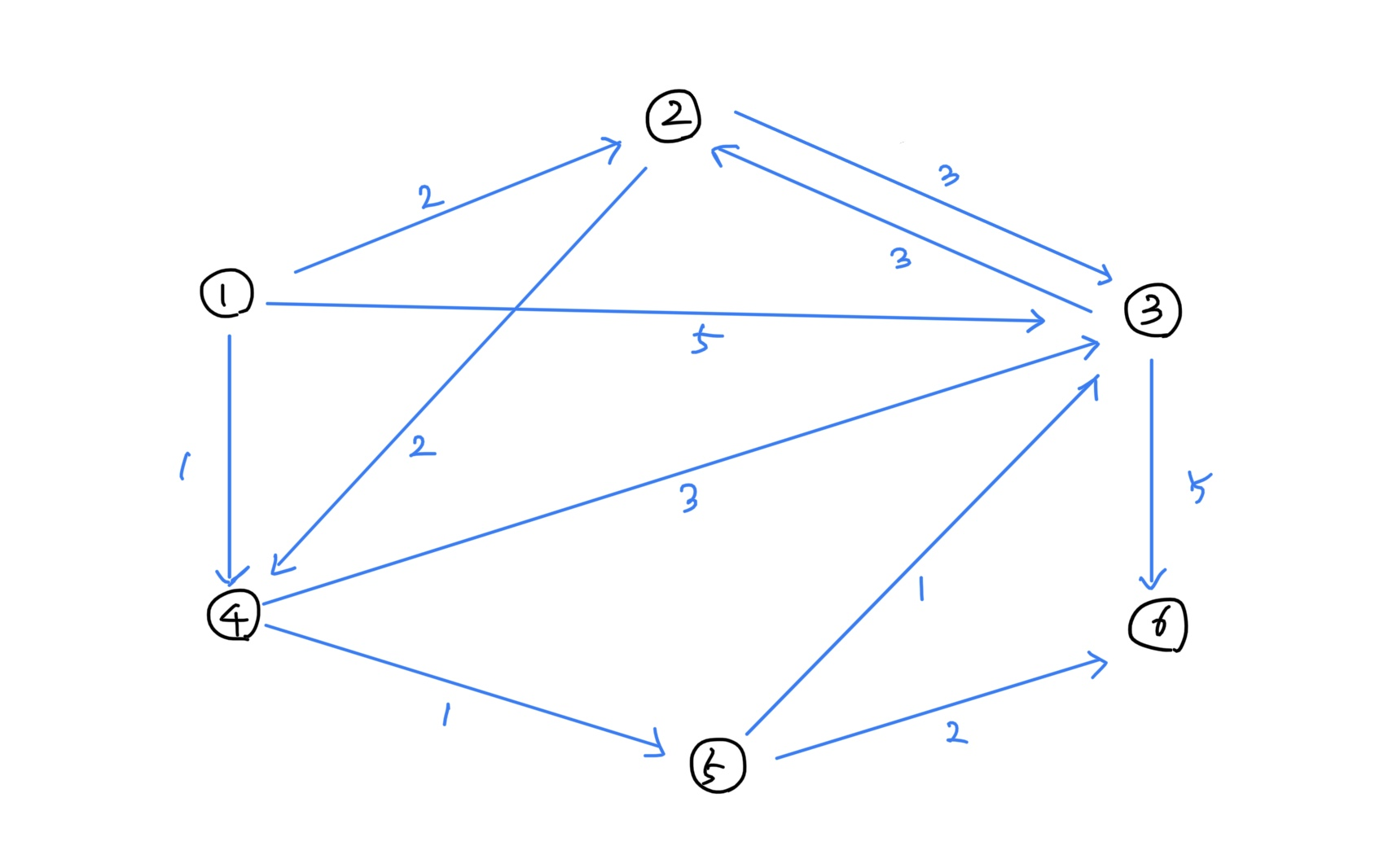
1) 1번 노드를 거쳐 다른 노드로 가는 비용을 계산한다. 즉, 1번 노드와 연결된 모든 간선을 하나씩 확인하면 된다.
-
1번 노드를 거쳐서2번,3번,4번 노드로 가는 최소 비용은 차례대로2(0 + 2), 5(0 + 5), 1(0 + 1)이다.- 세 노드에 대하여 더 짧은 경로를 찾았으므로 새로운 값으로 갱신

2) 4번 노드를 거쳐서 갈 수 있는 노드를 확인한다.
-
4번 노드에서 갈 수 있는 노드는
3번과5번이다. 이때4번 노드까지의 최단 거리는1이므로4번 노드를 거쳐서3번과5번 노드로 가는 최소 비용은 차례대로4(1 + 3), 2(1 + 1)이다.- 기존의 리스트에 담겨 있던 값보다 작으므로 다음과 같이 갱신된다.

3) 2번 노드가 선택된다.
2번 노드와 5번 노드까지의 최단 거리가 2로 같은데, 이럴 때는 일반적으로 번호가 작은 노드를 선택한다.
-
이번 단게에서
2번 노드를 거쳐서 가는 경우, 현재의 최단 거리를 더 짧게 갱신할 수 있는 방법은 없다.
4) 5번 노드가 선택된다. 5번 노드를 거쳐 3번과 6번 노드로 갈 수 있다.
-
현재
5번 노드까지 가는 최단 거리가2이므로,5번 노드에서3번 노드로 가는 거리인1을 더한3이 기존 값인4보다 작기 때문에 새로운 값3으로 갱신된다. -
6번 노드로 가는 거리도4로 갱신된다.
5) 3번 노드가 선택된다.
-
동일한 과정 반복

6) 6번 노드가 선택된다.
-
동일한 과정 반복

🟡 한 번 선택된 노드는 '최단 거리'가 완전히 선택된 노드이므로, 더 이상 알고리즘을 반복해도 최단 거리가 줄어들지 않는다.
import sys
input = sys.stdlin.readline
INF = int(1e9) #10억 (무한의 의미)
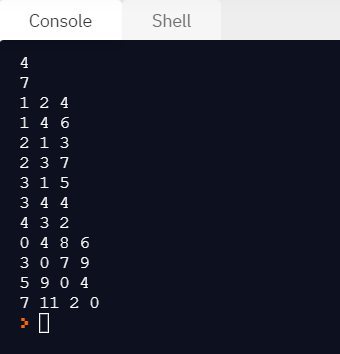
n, m = map(int, input().split())
start = int(input())
graph = [[] for i in range(n + 1)] #1부터 사용하기 위해 +1
visited = [False] * (n + 1) #방문 유무 확인 테이블
distance = [INF] * (n + 1) #최단거리 테이블
for _ in range(m):
a, b, c = map(int, input().split())
graph[a].append((b,c)) #a번 노드에서 b번 노드로 가는 비용이 c
#방문하지 않는 노드 중에서, 가장 최단 거리가 짧은 노드의 번호 반환
def get_smallest_node():
min_value = INF
index = 0
for i in range(1, n + 1):
if distance[i] < min_value and not visited[i]:
min_value = distance[i]
index = i
return index
def dijkstra(start):
#시작 노드에 대해서 초기화
distance[start] = 0
visited[start] = True
for j in graph[start]:
distance[j[0]] = j[1]
#시작 노드를 제외한 전체 n - 1개의 노드에 대해 반복
for i in range(n - 1):
#현재 최단 거리가 가장 짧은 노드를 꺼내서, 방문 처리
now = get_smallest_node()
visited[now] = True
#현재 노드와 연결된 다른 노드를 확인
for j in graph[now]:
cost = distance[now] + j[1]
#현재 노드를 거쳐서 다른 노드로 이동하는 거리가 더 짧은 경우
if cost < distance[j[0]]:
distance[j[0]] = cost
dijkstra(start)
for i in range(1, n + 1):
#도달할 수 없는 경우, 무한(INFINITY)이라고 출력
if distance[i] == INF:
print("INFINITY")
else:
print(distance[i])
-
처음에 각 노드에 대한 최단 거리를 담는 1차원 리스트를 선언한다.
- 단계마다 '방문하지 않은 노드 중에서 최단 거리가 가장 짧은 노드를 선택'하기 위해 매 단계마다 1차원 리스트의 모든 원소를 확인(순차 탐색)
-
모든 리스트는
(노드의 개수 + 1)의 크기로 할당하여, 노드의 번호를 인덱스로 하여 바로 리스트에 접근 할 수 있도록 했다. -
시간 복잡도: O(V²)
- 총 O(V)번에 걸쳐서 최단 거리가 가장 짧은 노드를 매번 선형 탐색해야 하고, 현재 노드와 연결된 노드를 매번 일일이 확인하기 때문
-
전체 노드가 5,000개 이하라면 일반적으로 이 코드로 문제를 풀 수 있다.
- 하지만 노드의 개수가 10,000개를 넘어가는 문제라면 이 코드로는 문제를 해결하기 어렵다.
방법 ②: 구현하기는 까다롭지만 빠르게 동작
-
최단 거리가 가장 짧은 노드를 단순히 선형적으로 찾는 것이 아니라 더욱 더 빠르게 찾을 수 있다면 어떨까?
-
여기서는 힙(Heap) 자료구조를 이용한다.
-
선형 시간이 아닌 로그 시간이 걸린다.
-
N = 1,000,000일 때, log₂N이 약 20인 걸 감안하면 속도가 획기적으로 빨라진다.
-
-
-
우선순위 큐
-
우선순위가 가장 높은 데이터를 가장 먼저 삭제한다.
-
파이썬:
heapq-
최소 힙: 값이 낮은 데이터가 먼저 삭제
-
최대 힙: 값이 큰 데이터가 먼저 삭제
- 최소 힙을 이용한 최대 힙의 이용
: 우선순위에 해당하는 값에 음수 부호(-)를 붙여서 넣었다가, 나중에 우선순우 큐에서 꺼낸 다음에 다시 음수부호를 붙여서 원래의 값으로 되돌리는 방식
- 최소 힙을 이용한 최대 힙의 이용
-
-
우선순위 값을 표현할 때는 일반적으로 정수형 자료형의 변수가 사용된다.
- 예) 물건정보가 있고, 이 물건 정보는 물건의 가치와 물건의 무게로만 구성된다고 가정하면, 모든 물건 데이터를
(가치, 물건)으로 묶어서 우선순위 큐 자료구조에 넣을 수 있다.
- 예) 물건정보가 있고, 이 물건 정보는 물건의 가치와 물건의 무게로만 구성된다고 가정하면, 모든 물건 데이터를
-
- 최단 거리를 저장하기 위한 1차원 리스트(최단 거리 테이블)는 아까와 같이 그대로 이용하고, 현재 가장 가까운 노드를 저장하기 위한 목적으로만 우선순위 큐를 추가로 이용한다.
<동작원리>
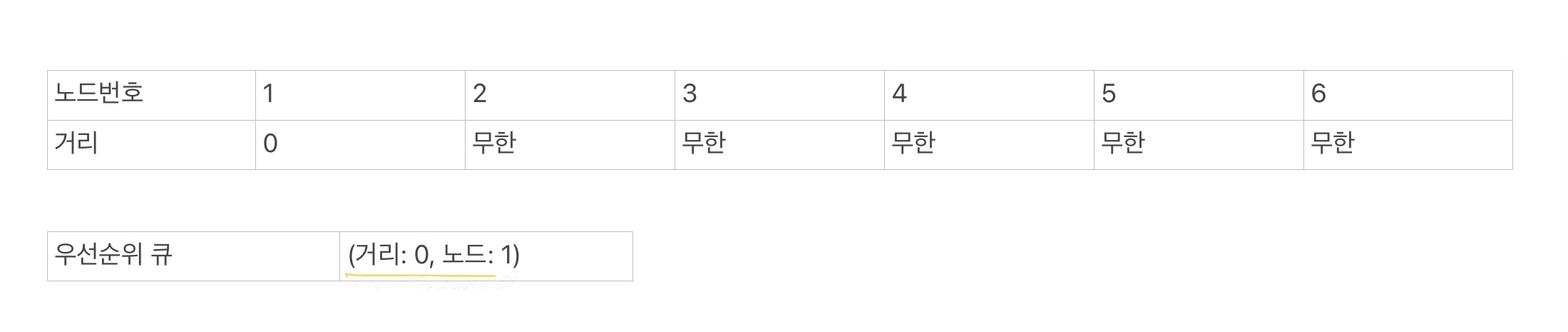
0) 1번 노드가 출발 노드인 경우, 출발 노드를 제외한 모든 노드의 최단거리를 무한으로 설정, 이후 우선순위 큐에 1번 노드를 넣는다.
-
1번 노드로 가는 거리는 자기 자신까지 도달하는 거리이기에
0이다.-
(거리: 0 , 노드: 1)의 정보를 가지는 객체를 우선순위 큐에 넣으면 된다.- 튜플의 첫 번째 원소를 기준으로 우선순위 큐를 구성
(거리, 노드번호)순서대로 튜플 데이터를 구성해 우선순위 큐에 넣으면 거리순으로 정렬된다.
- 튜플의 첫 번째 원소를 기준으로 우선순위 큐를 구성
-
1) 거리가 가장 짧은 노드를 선택하기 위해서는 우선순위 큐에서 그냥 노드를 꺼내면 된다.
-
우선순위 큐에서 노드를 꺼낸 뒤에 해당 노드를 이미 처리한 적이 있다면 무시
-
아직 처리하지 않는 노드에 대해서만 처리
-
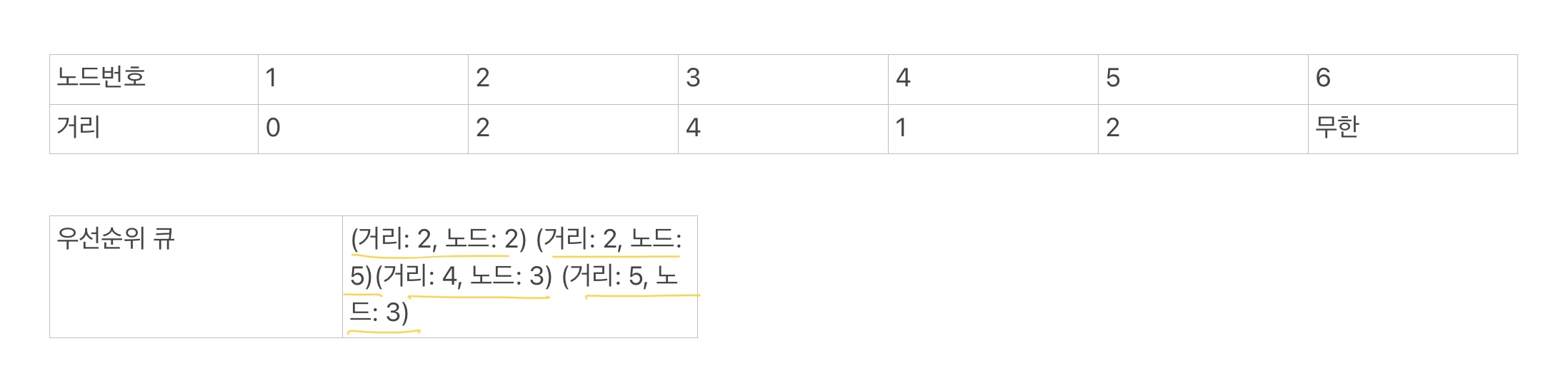
1번 노드를 거쳐서2번,3번,4번 노드로 가는 최소 비용 계산- 더 짧은 경로를 찾은 노드 정보들은 갱신 후, 다시 우선 순위 큐에 넣는다.

-
2) 다시 우선 순위 큐에서 원소를 꺼내서 동일한 과정 반복한다. 이번에는 (1, 4)의 값을 갖는 원소가 추출된다.
3) 노드 2에 대해서 처리한다.
-
2번 노드를 거쳐서 가는 경우 중 더 거리가 짧은 경우가 있는지 확인- 현재의 최단 거리를 더 짧게 갱신할 수 있는 방법은 없다.
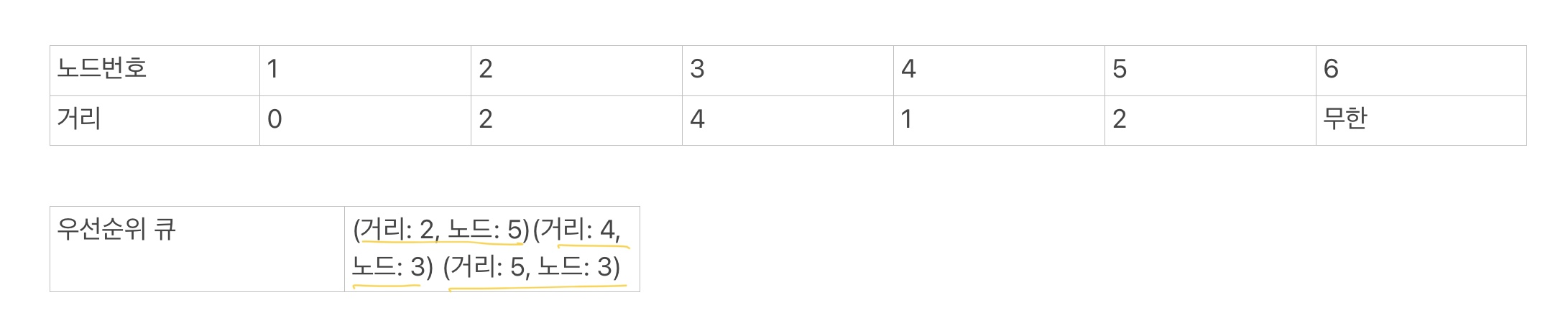
4) 노드 5에 대해 처리
5) (3, 3)을 꺼내서 3번 노드를 기준으로 알고리즘 수행
-
최단 거리 테이블이 갱신되지 않는다.

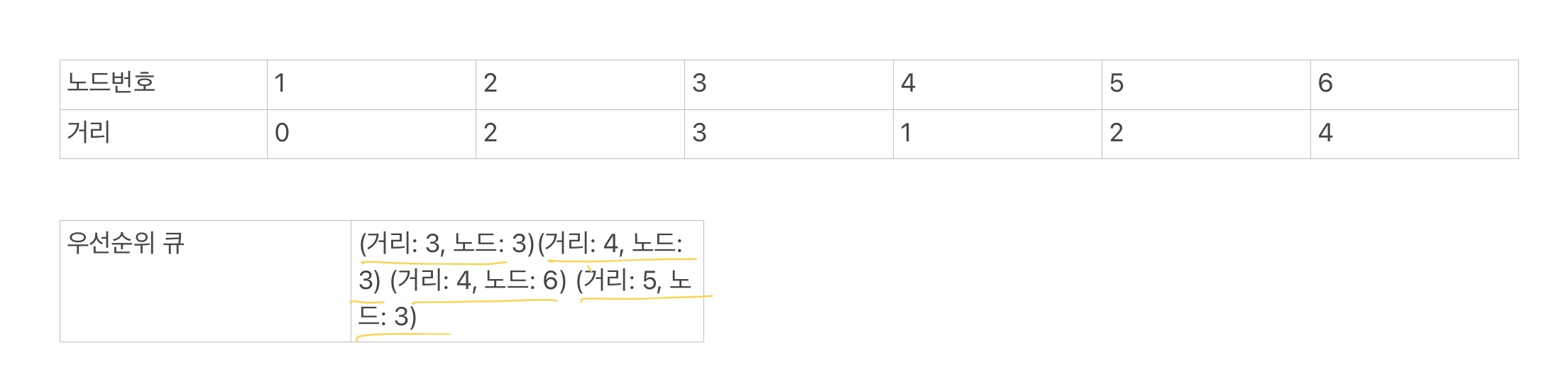
6) (4, 3)을 꺼내서 3번 노드를 기준으로 알고리즘 수행
-
3번 노드는 앞서 처리된 적이 있다.-
현재 우선순위 큐에서 꺼낸 원소에는
3번 노드까지 가는 최단 거리가4라는 정보가 들어 있다. 하지만 현재 최단 거리 테이블에서3번 노드까지의 최단거리는3이다. -
(4, 3)이라는 원소는 무시한다.

-
7) 4, 6이 꺼내진다.
-
6번 노드에 대해서 처리한다.
8) 마지막으로 남은 원소를 꺼낸다.
-
이미 처리된 노드이므로 무시

import heapq
import sys
input = sys.stdlin.readline
INF = int(1e9)
n, m = map(int, input().split())
start = int(input())
graph = [[] for i in range(n + 1)]
distance = [INF] * (n + 1)
for _ in range(m):
a, b, c = map(int, input().split())
graph[a].append((b,c))
def dijkstra(start):
q = []
#시작 노드로 가기 위한 최단 경로는 0으로 설정하여, 큐에 삽입
heapq.heappush(q, (0, start))
distance[start] = 0
while q: #큐가 비어있지 않을 때까지
#가장 최단 거리가 짧은 노드에 대한 정보 꺼내기
dist, now = heapq.heappop(q)
#현재 노드가 이미 처리된 적이 있는 노드라면 무시
if distance[now] < dist:
continue
#현재 노드와 연결된 다른 인접한 노드들을 확인
for i in graph[now]:
cost = dist + i[1]
#현재 노드를 거쳐서, 다른 노드로 이동하는 거리가 짧은 경우
if cost < distance[i[0]]:
distance[i[0]] = cost
heapq.heappush(q, (cost, i[0]))
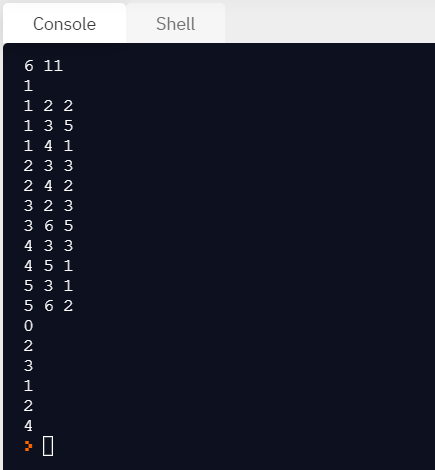
dijkstra(start)
for i in range(1, n + 1):
if distance[i] == INF:
print("INFINITY")
else:
print(distance[i])
-
get_smallest_node()라는 함수를 작성할 필요가 없다.- 최단 거리가 가장 짧은 노드를 선택하는 과정을 다익스트라 최단 경로 함수 안에서 우선순위 큐를 이용하는 방식으로 대체할 수 있기 때문
- 시간 복잡도: O(ElogV)
2. 플로이드 워셜 알고리즘
-
모든 지점에서 다른 모든 지점까지의 최단 경로를 모두 구해야 하는 경우
-
다이나믹 프로그래밍 알고리즘
<다익스트라와의 차이점>
-
다익스트라 알고리즘
-
단계마다 최단 거리를 가지는 노드를 하나씩 반복적으로 선택,
-
해당 노드를 거쳐 가는 경로를 확인함, 최단 거리 테이블을 갱신하는 방식으로 동작
-
-
프로이드 워셜 알고리즘
-
단계마다 '거쳐 가는 노드'를 기준으로 알고리즘을 수행,
-
하지만 매번 방문하지 않은 노드 중에서 최단 거리를 갖는 노드를 찾을 필요가 없다.
-
-
각 단계에서는 해당 노드를 거쳐 가는 모든 경우를 고려
1번 노드에 대해서 확인할 때는1번 노드를 중간에 거쳐 지나가는 모든 경우를 고려,
즉A → 1번 노드 → B로 가는 비용을 확인한 후에 최단 거리를 갱신- 알고리즘에서는 현재 확인하고 있는 노드를 제외하고,
N - 1개의 노드 중에서 서로 다른 노드(A, B)쌍을 선택한다.
- 이후에
A → 1번 노드 → B로 가는 비용을 확인한 뒤에 최단 거리를 갱신한다.
- 알고리즘에서는 현재 확인하고 있는 노드를 제외하고,
- ₙ₋₁ p ₂개의 쌍을 단계마다 반복해서 확인하면 된다.
- O(ₙ₋₁ p ₂)는 O(N²)으로 볼 수 있기에, 전체 시간 복잡도는 O(N³)이라고 할 수 있다.
-
K번의 단계에 대한 점화식은 다음과 같다.Dₐᵥ = min(Dₐᵥ, Dₐₖ + Dₖᵥ)- 'A에서 B로 가는 최소 비용'과 'A에서 K를 거쳐 B로 가는 비용'을 비교하여 더 작은 값으로 갱신하겠다는 것
INF = int(1e9)
n = int(input())
m = int(input())
#2차원 배열
graph = [[INF] * (n + 1) for _ in range(n + 1)]
#자기 자신에서 자기 자신으로는 0으로 초기화
for a in range(1, n + 1):
for b in range(1, n + 1):
if a == b:
graph[a][b] = 0
#간선의 정보 입력받아, 초기화
for _ in range(m):
a, b, c = map(int, input().split())
graph[a][b] = c
for k in range(1, n + 1):
for a in range(1, n + 1):
for b in range(1, n + 1):
graph[a][b] = min(graph[a][b], graph[a][k] + graph[k][b])
#수행된 결과를 출력
for a in range(1, n + 1):
for b in range(1, n + 1):
if graph[a][b] == INF:
print("INFINITY", end=" ")
else:
print(graph[a][b], end=" ")
print()