모델
- 제어하려는 실제 대상(plant, system, process)을 수식(미분 방정식)으로 표현
모델 얻기
- 근본적인 물리법칙으로 구현
- 실험으로 시스템 식별해서 구현
시스템을 어디까지 모델링?
- 관심 있는 문제의 현상(움직임)을 최대한 간단하게 표현하는 것이 최고
- 복잡하면 이해하기 힘듬, 제어가 목적이지 모델링이 목적x
- 잘 모르는 것들(관심 밖의 모든 것들)은 다 외란으로 취급
기계적 시스템의 동역학
- ex) : F=ma (뉴턴의 법칙) 등으로 기계적 시스템의 움직임 수식으로 표현
- 문제에 적합한 좌표계 선정 필요
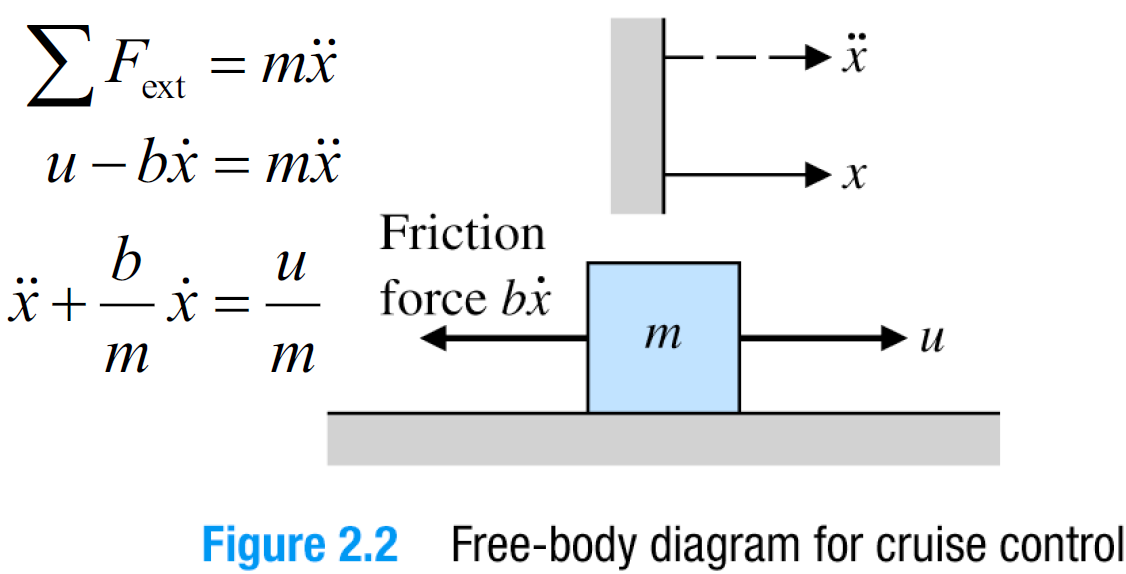
- free-body diagram 정확히 구할 수 있어야 함
ex) 크루즈 컨트롤 모델(1차원 좌표계)
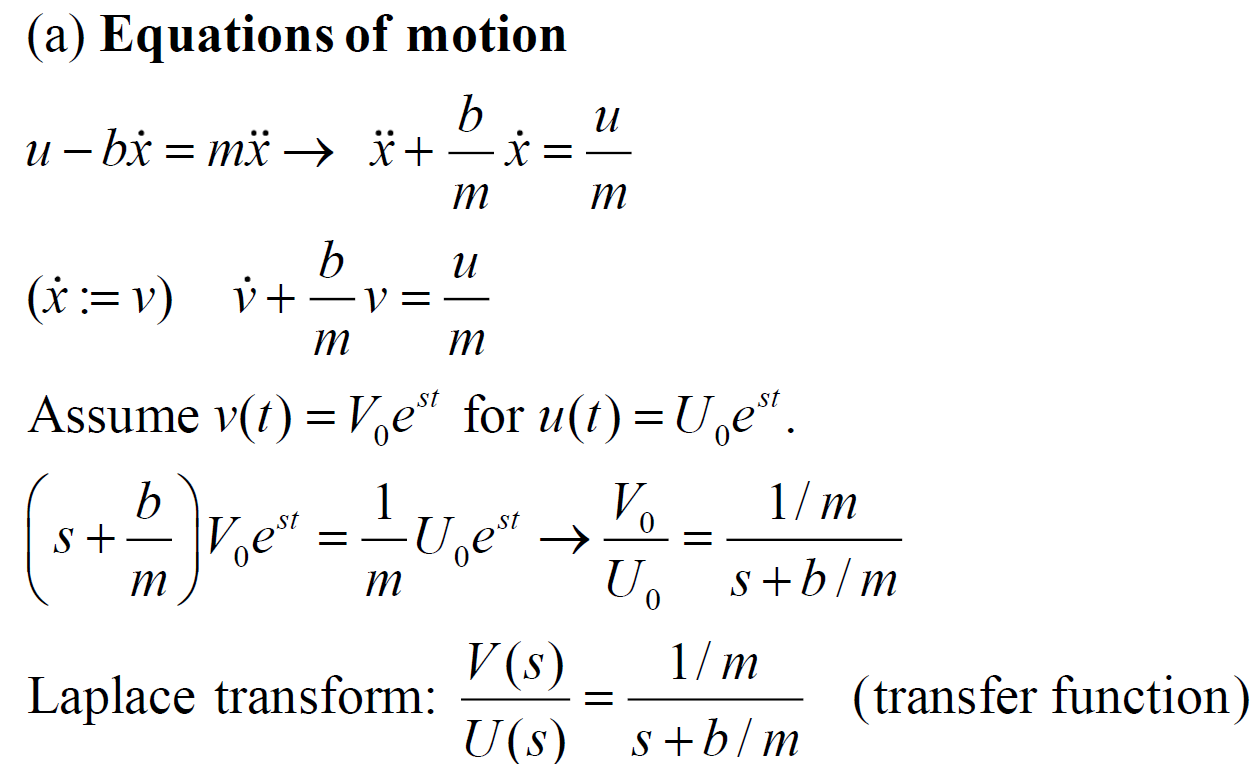
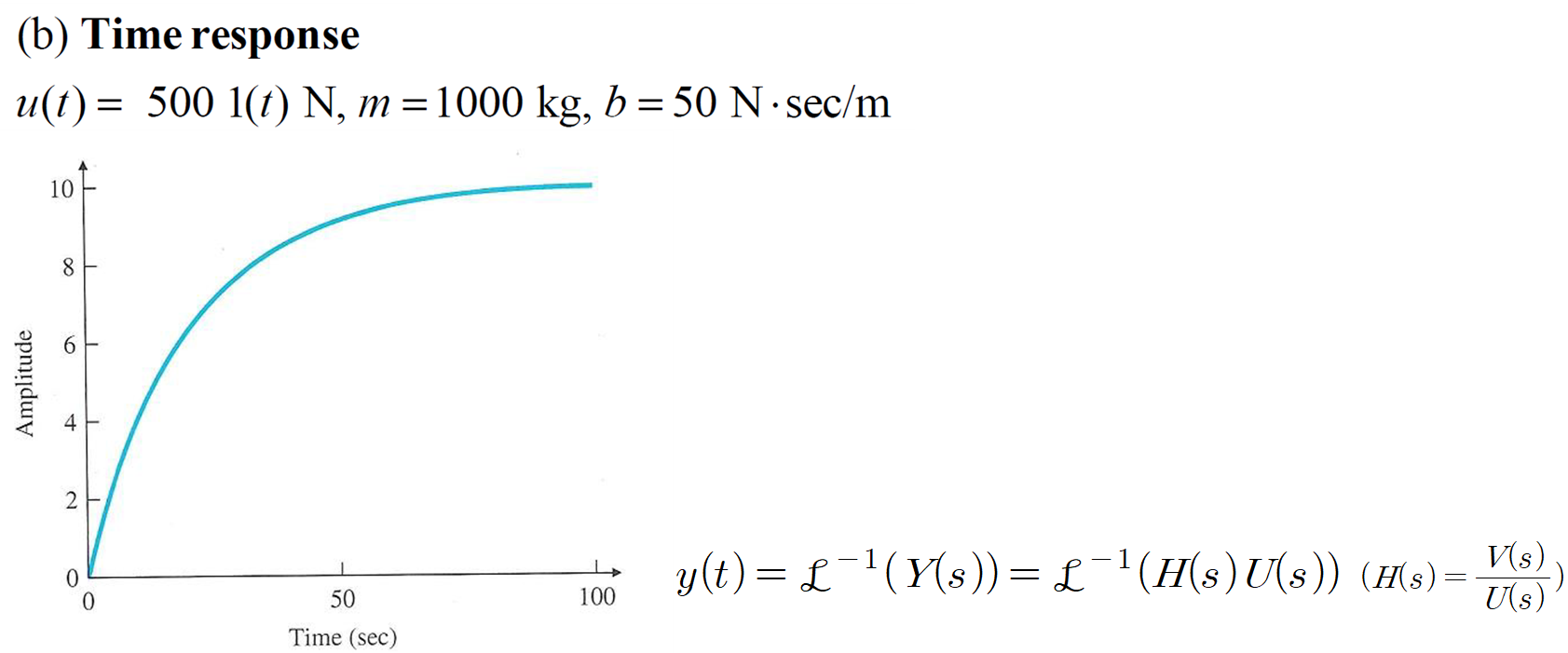
- 관심의 대상에 따라 input, output 달라질 수 있으므로 그에 맞게 전달 함수 구성

감사합니다. 이런 정보를 나눠주셔서 좋아요.