Gym Acrobot-v1
이 포스트에서는 OpenAi의 Gym에서 제공하는 Acrobot-v1 환경이 어떻게 정의 되어 있는지 분석합니다.
하나하나 뜯어보며 분석하고 나면 이 라이브러리를 기반으로 나만의 환경을 만들 수 있습니다.
Link
환경이 기구학적으로 어떻게 정의 되어 있는지 살펴보면 다음과 같이 정리할 수 있습니다.

두 링크는 엇갈리게 설계되어 있어 만약 서로 겹쳐도 부딪히지 않는다는 가정이 있습니다.
가장 중심점을 base joint라고 한다면 각 링크는 base joint로부터 순서대로 link1, link2로 정의됩니다.
링크1의 시초선은 하단방향(중력방향)이고, 링크2의 시초선은 1번 링크 방향입니다.
즉 링크2 각도는 링크1에 대한 상대적인 각도입니다.
Constant Definition
gym 라이브러리 내부에 선언되어 있는 상수값입니다.
| constant | value | unit |
|---|---|---|
| INK_LENGTH_1 | 1.0 | [m] |
| LINK_LENGTH_2 | 1.0 | [m] |
| LINK_MASS_1 | 1.0 | [kg] mass of link 1 |
| LINK_MASS_2 | 1.0 | [kg] mass of link 2 |
| LINK_COM_POS_1 | 0.5 | [m] position of the center of mass of link 1 |
| LINK_COM_POS_2 | 0.5 | [m] position of the center of mass of link 2 |
| LINK_MOI | 1.0 | moments of inertia for both links |
| MAX_VEL_1 | 4 * pi | [rad/sec] |
| MAX_VEL_2 | 9 * pi | [rad/sec] |
Observation Space
관측값에서 0번과 1번은 1번 링크 각도의 삼각함수 값, 2번과 3번은 2번 링크 각도의 삼각함수 값입니다.
4번과 5번은 각 링크의 각속도를 나타내고 있습니다.
코드상에서 Observation space는 Box Class로 표현합니다.
| 0 | 1 | 2 | 3 | 4 | 5 |
|---|---|---|---|---|---|
Action Space
행동은 총 3가지이고, 링크1과 링크2를 연결하는 joint의 토크를 의미합니다.
코드상에서 Observation space는 Discrete Class로 표현합니다.
| Action | 0 | 1 | 2 |
|---|---|---|---|
| Torque | -1 | 0 | 1 |
Initial Value
환경을 초기화 시키는 environment의 reset함수의 정의는 다음과 같습니다.
def reset(self):
self.state = self.np_random.uniform(low=-0.1, high=0.1, size=(4,))
return self._get_ob()리셋을 하는 경우 초깃값은 -0.1에서 0.1사이의 균등분포 난수로 결정됩니다.
따라서 의 각도와 의 토크를 갖게 됩니다.
아래의 표는 100,000번 반복하였을 때 초기값의 최대, 최솟값입니다.
| index | 0 | 1 | 2 | 3 | 4 | 5 |
|---|---|---|---|---|---|---|
| meaning | ||||||
| MAX | 1. | 0.09983311 | 1. | 0.09983235 | 0.09999991 | 0.09999979 |
| MIN | 0.9950042 | -0.09983071 | 0.99500427 | -0.09983242 | -0.09999971 | -0.09999975 |
Terminal Condition
라이브러리에서 제시하는 terminal contidion은 다음과 같습니다.
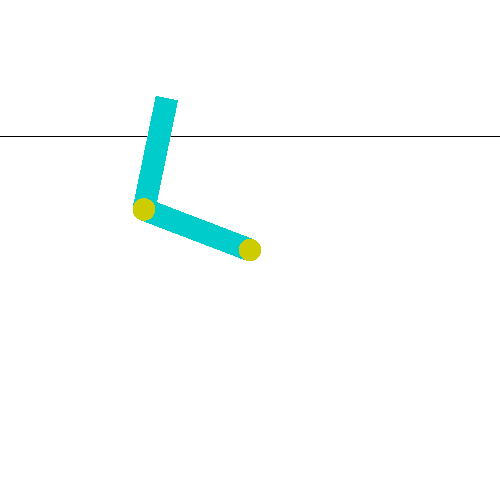
def _terminal(self):
s = self.state
return bool(-cos(s[0]) - cos(s[1] + s[0]) > 1.)이는 다음과 같이, 상단에 직선으로 표시 된 영역을 어느 정도 넘겼다는 의미입니다.
Analysis
역학에 대한 해석은 4차 runge-kutta법을 사용합니다.
아래는 gym 라이브러리 내의 rk4 함수입니다.
def rk4(derivs, y0, t, *args, **kwargs):
try:
Ny = len(y0)
except TypeError:
yout = np.zeros((len(t),), np.float_)
else:
yout = np.zeros((len(t), Ny), np.float_)
yout[0] = y0
for i in np.arange(len(t) - 1):
thist = t[i]
dt = t[i + 1] - thist
dt2 = dt / 2.0
y0 = yout[i]
k1 = np.asarray(derivs(y0, thist, *args, **kwargs))
k2 = np.asarray(derivs(y0 + dt2 * k1, thist + dt2, *args, **kwargs))
k3 = np.asarray(derivs(y0 + dt2 * k2, thist + dt2, *args, **kwargs))
k4 = np.asarray(derivs(y0 + dt * k3, thist + dt, *args, **kwargs))
yout[i + 1] = y0 + dt / 6.0 * (k1 + 2 * k2 + 2 * k3 + k4)
return yout