Variance
앞선 포스트에서 설명한 바와 같이 분산을 줄이는 것은 성능 향상에 꽤 큰 기여를 할 수 있습니다.
분산이 무엇인지, 어떤 성질을 가지는지부터 알아보겠습니다.
variance의 정의는 다음과 같습니다.
다음과 같이 평균이 0인 5개의 데이터가 있다고 합시다.
| X | -2 | -1 | 0 | 1 | 2 |
|---|---|---|---|---|---|
| 4 | 1 | 0 | 1 | 4 |
이 데이터의 분산은 입니다.
만약 모든 데이터에 2를 더한다고 하면 다음과 같이 바뀌게 될 것입니다.
| X | 0 | 1 | 2 | 3 | 4 |
|---|---|---|---|---|---|
| 4 | 1 | 0 | 1 | 4 |
이 데이터의 분산은 여전히 입니다.
이와 같이 분산의 특성 중 하나는 모든 데이터에 같은 값을 더하거나 빼도 변하지 않는다는 것입니다.
이번에는 모든 값에 2를 곱해보겠습니다.
| X | 0 | 2 | 4 | 6 | 8 |
|---|---|---|---|---|---|
| 16 | 4 | 0 | 4 | 16 |
이 데이터의 분산은 전과 다르게 입니다.
따라서 다음과 같이 정의할 수 있습니다.
Baseline
이와 같이 어떤 값을 더하는 것 자체는 분산이 바뀌지 않지만, 곱해져 있는 어떤 값을 가산하는 것은 분산에 영향을 끼치게 됩니다.
PG 목표함수를 다시 살펴봅시다.
목표함수의 분산은 와 같은 형태임을 알 수 있습니다.
그래서 에 어떤 값을 빼 주게 되면 분산이 줄어드는 효과를 볼 수 있습니다.
A2C 알고리즘에서 이 어떤 값을 baseline이라고 하기로 하였습니다.
Entropy
지난 포스트에서 다루었던 REINFORCE의 목표함수를 다시 복습해보겠습니다.
엔트로피()는 어떤 시스템의 불확실성을 측정하는 척도입니다. 정책의 엔트로피는 에이전트가 수행할 행동에 대해 얼마나 불확실한지를 보여줍니다.
손실 함수에서 이 엔트로피를 빼 줌으로써 다음 취할 행동에 대하여 너무 확신하고 있는 에이전트에게 벌을 주어 local minimum에 빠지지 않게 탐색을 계속 시킬 수 있었습니다.
Advantage
A2C은 Dueling DQN에서 배웠던, 상태-행동 가치 함수가 상태 가치 함수와 행동 이득으로 나뉠 수 있다는 이론에 기초하여 baseline을 사용하는 알고리즘입니다.
- : 상태-행동 가치 함수, 상태 에서 행동 을 하였을 때 얻을 수 있는 이득
- : 상태 에서 행동의 이득
- : 상태 가치 함수, 상태 에서 최적으로 행동하였을 때, 얻을 수 있는 할인된 총 보상에 대한 기댓값
위 식은 Dueling DQN을 다룰 때 사용하였던 식과 완전 동일합니다.
위의 식을 baseline으로 쓰기 위해 정리해보면 행동 이득은 다음과 같이 표현됩니다.
그래서 기존의 PG식을 다음과 같이 바꾸면 완벽한 baseline이 적용됩니다.
실제 학습 시 문제점은 총 할인 보상 에서 빼야 할 상태값 가 얼마인지 알 수 없다는 것입니다.
그래서 전문가들은 아래 그림과 같이 를 근사하는 또 하나의 신경망을 만들어 이 문제를 해결하였습니다.
A2C Network
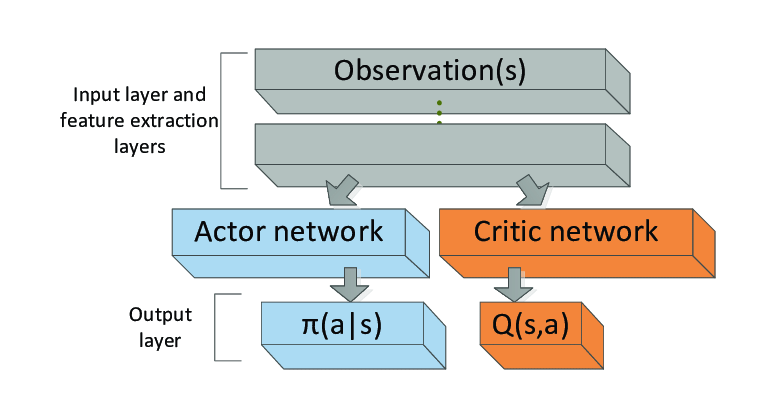
각 행동 확률을 반환하는 신경망(정책망)과 현재 상태에서 얻을 수 있는 미래의 가치(상태 가치)를 반환하는 신경망(가치망)은 개념적으로 별개의 신경망이지만, 실제로 학습할 때는 학습의 효율성 및 수렴성을 고려하여 한 신경망에서 분기되는 형태로 만듭니다.
따라서 A2C 알고리즘은 한 입력층을 가지고, 은닉층에서 확률 분포를 반환하는 정책망과 상태의 가치를 반환하는 가치망으로 분기하여 각각 판단하게됩니다.
이와 같이 두 역할이 분리되어 있기 때문에 Advantage Actor Critic(A2C) 알고리즘이라고 합니다.
정책망은 확률 분포를 반환하기 때문에 보통 sigmoid 활성화 함수를 거쳐 출력됩니다. 가치망의 경우 ReLU 활성화 함수를 거칩니다.
- Actor(정책망): 각 행동에 대한 확률 분포()를 반환. 정책망이 어떤 행동을 취해야할지 알려줌.
- Critic(가치망): 상태의 가치()를 반환, 에이전트의 행동이 예상보다 얼마나 좋을지를 평가.
Loss Function
이 A2C는 신경망에서 보이듯이 정책반복 알고리즘과 가치반복 알고리즘을 조합하여 중간쯤에 있는 알고리즘입니다.
최종적으로 정책망의 gradient loss는 다음과 같습니다.
- : X에 대한 기댓값
- : 상태 s에서 행동 a를 취할 확률의 로그값
- : 액션 어드벤티지 를 의미
가치망은 Critic이 예측한 미래에 대한 기댓값과 실제 보상의 차이를 loss로 사용합니다. 프레임워크를 사용하여 프로그래밍 시 유의할 점은 모델이 그래프 구조를 가지기 때문에 가치망의 loss를 계산할 시에 정책망으로까지 그라디언트가 전파되지 않도록 설계 하여야 합니다.
가치망의 gradient loss는 다음과 같습니다.
일반적으로 MSE를 사용하지만, MAE와 MSE를 절충한 Hubor Loss를 사용하는 경우도 있습니다.
Hubor Loss
참값이 , 예측값이 로 가 임계값 보다 작거나 같다면 , 크다면 를 사용함으로써 너무 민감하게 반응하지 않게 할 수 있습니다.
