
0. 개요
앞서 OpenCV가 어떤방면에서 사용되는지 , 특징은 어떠한지 알아보았다. 직접 OpenCV를 활용하기 위해서 기초적인 사용법에 대해서 알아보자.
1. 도형그리기
OpenCV에서는 선, 사각형, 원, Text 와 같은 도형을 그리는 기능을 제공한다 아래의 사용법을 살펴보자.
선(line) 그리기
cv2.line(img, start, end , color, thickness)사각형(rectangle) 그리기
cv2.rectangle(img, start, end , color, thickness)원(circle) 그리기
cv2.circle(img, center, radius, color, thickness)텍스트(Text) 그리기
cv2.text(img, text, org, font, fontScale, color)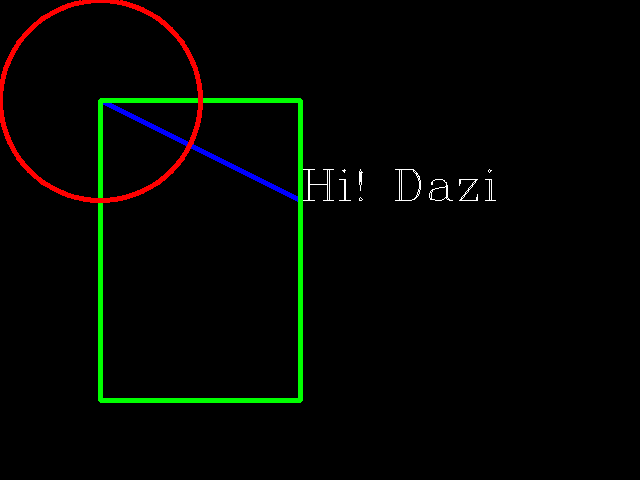
OpenCV를 통해 여러가지 도형 및 텍스트를 그린 모습.
color 같은경우에는 BGR 값으로 정의할 수 있다.
2.이미지 파일 다루기
컴퓨터 비전에서 이미지 파일을 다루는것은 당연한 일이기 때문에, 이미지 파일을 어떻게 다루는지 아는것은 필수적이다.
이미지 파일 읽기(imread)
cv2.imread(filename,flags)여기서 flags 에는 이미지를 읽을 때 적용되는 옵션을 지정하는 매개변수이다.
IMREAD_COLOR, IMREAD_GRAYSCALE, IMREAD_UNCHANGED 과 같은 옵션을 선택하여 이미지를 불러올 수 있다.
화면에 이미지를 표시하기
cv2.imshow(window_title,image)window title 이름을 지정하고 image를 창으로 띄울 수 있다.
이미지를 파일로 저장하기
cv2.imwrite(filename, image)filename으로 이미지를 저장 할 수 있다.

IMREAD_COLOR로 생성한 그림.

IMREAD_GRAYSCALE로 생성한 그림.
특정 색상의 픽셀 찾기
OpenCV 이미지는 픽셀로 구성되어 있고, 가로선 * 세로선 으로 읽을 수 있다. 아래의 예시코드를 통해 특정 픽셀을 찾는 방법을 알아보자.
import cv2
import numpy as np
#img = cv2.imread('src/ex_codes/opencv_ex/spot.png', cv2.IMREAD_GRAYSCALE)
img = cv2.imread('src/ex_codes/opencv_ex/grim.png', cv2.IMREAD_COLOR)
#height
h = img.shape[0]
w = img.shape[1]
print("The image dimension is %d x %d" % (w, h))
for i in range(0, h - 1):
for j in range(0, w - 1):
if np.array_equal(img[i, j],[255,255,255]):
print(img[i, j])
print(i, j)
cv2.imshow('spot', img)
cv2.waitKey(1000)
OpenCV에서 이미지를 불러오는 방식이 height, width 좌표의 픽셀의 BGR 값들로 구성된 array로 읽어들인다. img.shape 를 통해 해당 값을 알 수 있다.
그렇기 때문에 특정 색깔을 찾고자 할때 해당 픽셀의 좌표와 원하는 BRG 값을 대조하면 원하는 색깔의 위치를 찾을 수 있다.
위 코드에서는 검정색을 찾을 수 있다.
그리고 IMREAD_GRAYSCALE 로 불러온 파일은 무채색이기 때문에 색상의 밝기로만 픽셀을 구분 할 수 있다. 그래서 픽셀에 저장되는 값이 0~255 사이의 값이다.
ROI(Region of Interest) 설정하기
이미지를 처리할때 관심범위를 지정하여 작업을 할 수있다.
cv2.imshow(window_title,image[a:b, c:d])잘라내는 범위는 당연히 원본이미지 값 보다 크면 안된다.

3. HSV 색상 모델
OpenCV에서는 BGR 색상 모델을 사용하기도 하지만, 때때로 HSV 라는 색상 표현 방식을 사용하기도 한다.
H(Hue, 색상) , S(Saturation, 채도), V(Value, 명도) 로 표현하며 , 객체를 분할해 내기 용이한 장점이 있다.
아래의 코드를 통해 BGR을 HSV로 변환 할 수 있다.
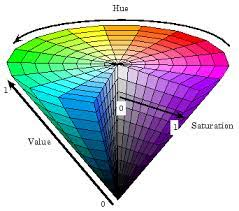
cv2.cvtColor(image, cv2.COLOR_BGR2HSV) Hue 범위 : 0 ~ 179 (색상스펙트럼 각도)
Saturation 범위 : 0 ~ 255
Value 범위 : 0~255
HSV 모델을 통한 차선 구분
도로의 색상은 주로 어두운색(검정색)이고, 차선은 밝은 색이기 때문에, 명도를 활용하면 구분해내기 쉽다.
아래의 코드와 입력하면 어떤 이미지에서 흰색으로 인식할 범위를 설정하여 inRange 함수를 통해 흰색 픽셀의 범위를 알아 낼 수 있다.
예시코드
import cv2
import numpy as np
img = cv2.imread('cars.png')
hsv = cv2.cvtColor(img, cv2.COLOR_BGR2HSV)
lower_white = np.array([0,0,150])
upper_white = np.array([179,255,255])
mask = cv2.inRange(hsv, lower_white, upper_white)
cv2.imshow('line', mask)
cv2.waitKey(10000)
normal image

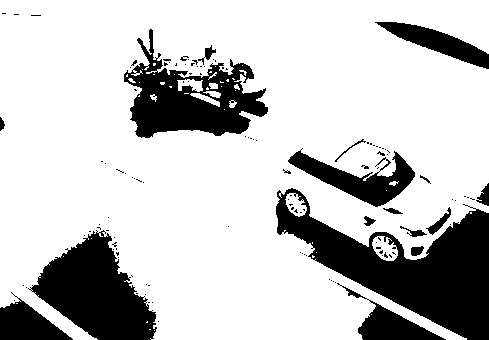
value range 50~255
value range 100~255
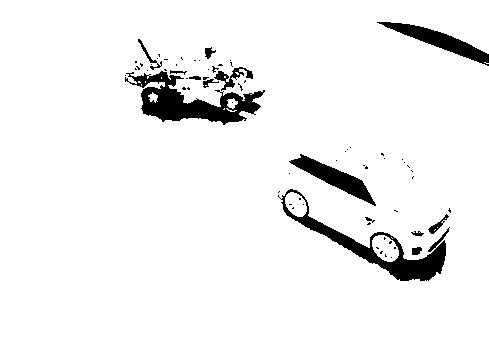
value range 150~255

위와 같이 image를 HSV로 변한 한 뒤 범위내의 색상을 흰색 영역으로 추출하여 이미지를 변환 한 것을 확인 할 수 있다.
value range 를 바꿔가면서 실행화면을 확인해보았을때 150~255 범위에서 차선을 잘 인식하는 것을 확인 할 수 있었다.
외부환경 및 상황을 고려하여 명도 값을 조절하여 차선을 인식하게 끔 바꾸는 것이 좋을 것 같다.
번외로 차선 외에 이미지의 특정 색상을 검출해내는 것도 시도해보았다.

응용하면 위와같이 파란부분의 영역만 골라서 확인 할 수도 있다.

cv2.bitwise_and(img, img, mask=blue_mask)위 코드를 통해 원본이미지의 파란부분만 강조 표시 할수도 있다.


다른 이미지 예시.
4. 동영상 파일 다루기
openCV에서 이미지 뿐만아니라 동영상 및 실시간 화면을 처리해야하는 경우가 많다.
아래에서 동영상 파일을 핸들링 하는방법에 대해서 알아보자.
video.py
import cv2
vid = cv2.VideoCapture('src/ex_codes/opencv_ex/small.avi')
while True:
ret, frame = vid.read()
if not ret:
#once
break
#if want roof
#vid.set(cv2.CAP_PROP_POS_FRAMES,0)
#continue
frame = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
cv2.imshow('video', frame)
if cv2.waitKey(1) > 0:
break
vid.release()
# cv2.waitKey(20000)
cv2.destroyAllWindows()
