
🤔0.개요
ROS의 Rviz 프로그램을 이용하면 3D자동차 모델을 조작하는 시뮬레이션이 가능하다. 이번시간에는 Rviz를 통해 자동차를 제어하는 시뮬레이션 프로그래밍을 진행한다.
위의 사진은 RViz 단독 실행 화면이다. 지금은 아무것도 보이지 않지만 코드를 작성하여 자동차 모형 및 조작 시뮬레이션 프로그래밍 코드를 작성해보자.
🖥️1.코드작성
우선 RViz를 구동하기 위해서는 launch 파일을 작성해야한다.
🚀rviz_drive.launch
<launch>
<param name="robot_description" textfile="$(find rviz_xycar)/urdf/xycar_3d.urdf"/>
<param name="use_gui" value="true"/>
<!-- rviz display -->
<node name="rviz_visualizer" pkg="rviz" type="rviz" required="true"
args="-d $(find rviz_xycar)/rviz/rviz_drive.rviz"/>
<node name="robot_state_publisher" pkg="robot_state_publisher"
type="state_publisher"/>
<node name="driver" pkg="rviz_xycar" type="rviz_8_drive.py" />
<node name="converter" pkg="rviz_xycar" type="converter.py" />
</launch>robot_description 은 로봇의 기하학적인 모양, 관절, 링크 등을 기술하는 파일이다. 정확한 내용에 대해서는 차후 다루겠다.
그리고 rviz_drive.rviz는 로봇 시뮬레이션의 시각화 설정을 불러 올 수 있다.
🐍rviz_8_drive.py
import rospy
import time
from xycar_motor.msg import xycar_motor
motor_control = xycar_motor()
rospy.init_node('driver')
pub = rospy.Publisher('xycar_motor', xycar_motor, queue_size=1)
def motor_pub(angle, speed):
global pub
global motor_control
motor_control.angle = angle
motor_control.speed = speed
pub.publish(motor_control)
speed = 3
while not rospy.is_shutdown():
angle = -50
for i in range(40):
motor_pub(angle, speed)
time.sleep(0.1)
angle = 0
for i in range(30):
motor_pub(angle, speed)
time.sleep(0.1)
angle = 50
for i in range(40):
motor_pub(angle, speed)
time.sleep(0.1)
angle = 0
for i in range(30):
motor_pub(angle, speed)
time.sleep(0.1)
코드는 지난 시간 모터제어기 프로그래밍 게시글에서 일부를 수정하였다.
🐍converter.py
import rospy, rospkg
import math
from xycar_motor.msg import xycar_motor
from sensor_msgs.msg import JointState
from std_msgs.msg import Header
global pub
global msg_joint_states
global l_wheel, r_wheel
def callback(data):
global msg_joint_states,l_wheel, r_wheel, pub
Angle = data.angle
msg_joint_states.header.stamp = rospy.Time.now()
steering = math.radians(Angle * -0.4)
if l_wheel > 3.14:
l_wheel = -3.14
r_wheel = -3.14
else:
l_wheel += 0.01
r_wheel += 0.01
msg_joint_states.position = [steering, steering, r_wheel, l_wheel,
r_wheel, l_wheel]
pub.publish(msg_joint_states)
def start():
global msg_joint_states,l_wheel, r_wheel, pub
rospy.init_node('converter')
pub = rospy.Publisher('joint_states', JointState, queue_size=10)
msg_joint_states = JointState()
msg_joint_states.header = Header()
msg_joint_states.name = ['front_right_hinge_joint',
'front_left_hinge_joint',
'front_right_wheel_joint',
'front_left_wheel_joint',
'rear_right_wheel_joint',
'rear_left_wheel_joint']
msg_joint_states.velocity = []
msg_joint_states.effort = []
l_wheel = -3.14
r_wheel = -3.14
rospy.Subscriber("xycar_motor", xycar_motor, callback)
rospy.spin()
if __name__ == '__main__':
start()converter은 토픽을 전환하는 역할을 수행한다. xycar_motor 토픽을 rviz에서 사용할 JointState 토픽의 형태에 맞춰 전달한다.
👀2.실행화면
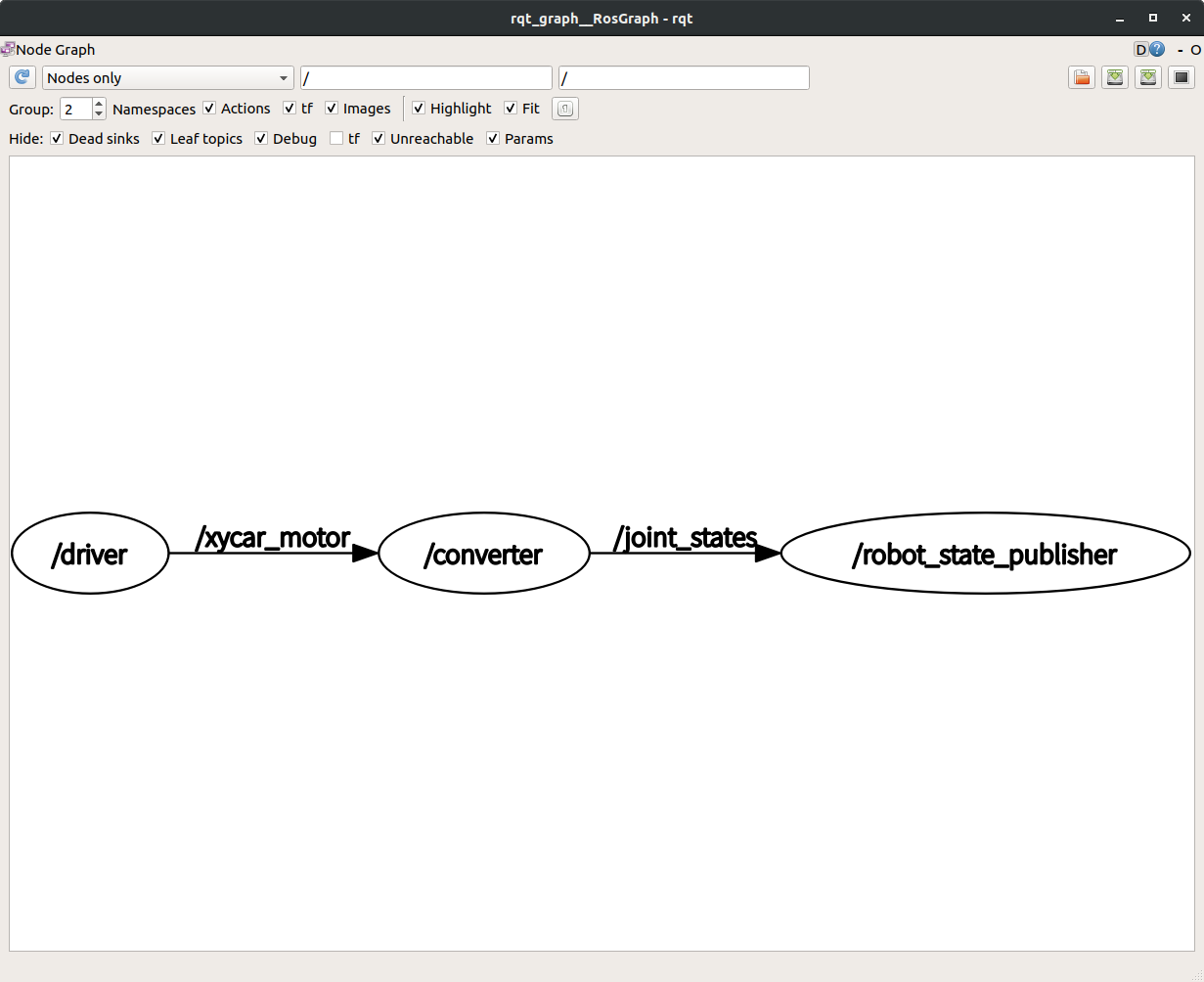
rqt_graph를 통한 노드 동작 확인.
자세히 보면 앞바퀴가 천천히 회전하고 정렬되고 하는모습을 확인 할 수 있다.
아쉬운 점은 시뮬레이션 화면만 봐서는 움직이는지 확인하기 힘든데, 이동한 경로를 표현해주거나 위치변화를 확인 할 수 있는 방법이 있다면 시도해보고 싶다.

GoGoSing