
🤔0.개요
Ros 노드 통신 중 발생 할 수 있는 문제를 알아보고, 해결방안을 모색해보자.
📒발생 할 수 있는 문제 List
1.노드 간 동기화 문제
2.ROS 전송속도
3.ROS 처리 지연 문제
4.ROS 타임 슬롯 문제
5.ROS 노드의 순차 실행
📶1.노드 간 동기화 문제
노드 간 통신을 할 때 Publisher, Subscriber 가 topic 을 가지고 통신을 하는 데, 만약 Subscriber가 데이터를 받을 준비가 안돼어 있다면 어떤 일이 발생할까? 아래의 코드를 가지고 문제를 직면해보고 해결방안을 모색해보자.
1-1. 문제 파악하기
🐍sender_serial.py
import rospy
from std_msgs.msg import Int32
rospy.init_node('sender_serial')
pub = rospy.Publisher('sync_issue',Int32)
rate = rospy.Rate(2)
count = 1
while not rospy.is_shutdown():
pub.publish(count)
count+=1
rate.sleep()
🐍reciever_serial.py
import rospy
from std_msgs.msg import Int32
def callback(msg):
print msg.data
rospy.init_node('receiver_serial')
sub = rospy.Subscriber('sync_issue',Int32,callback)
rospy.spin()
위와 같이 publisher와 Subscriber 의 코드를 작성하고 실행해보자!
실행화면은 아래와 같다.
Publisher는 첫번째로 1을 보냈는데,데이터가 누락되었고, 두번째 데이터부터 받기 시작했다.
첫번째 데이터가 누락되는 문제가 발생한 것이다.
1-2. 원인 찾기
원인은 Subscriber가 준비가 안 됐을 때, Publisher 가 메세지를 전송하였다는게 문제였다.
이를 해결 하기 위해 어떤 방법을 사용해야 할까?
1-3. 문제 해결하기
rospy의 get_num_connections() 함수를 사용하면 해결 할 수 있다.
해당 함수는 특정 노드에 연결된 노드의 수를 리턴하는 함수이다. 아래와 같이 코드를 수정하였다.
🐍sender_serial.py
import rospy
from std_msgs.msg import Int32
rospy.init_node('sender_serial')
pub = rospy.Publisher('my_topic',Int32)
rate = rospy.Rate(2)
count = 1
while not pub.get_num_connections() : #추가내용
pass
while not rospy.is_shutdown():
pub.publish(count)
count+=1
rate.sleep()
publisher 에 연결된 노드의 개수가 0개라면 무한루프에 걸려 메세지를 보낼 수 없다. 만약 노드가 연결된다면 무한루프에서 탈출하여 다음 메세지를 보내는 while문으로 진입 할 수 있다. 아래의 화면은 새롭게 고친 코드 실행 화면이다.
첫번째 메세지부터 문제 없이 받을 수 있는 것을 확인 할 수 있다.
✈️2.ROS 전송속도
노드끼리 통신을 할때 메세지의 크기에 따른 통신 속도의 차이에 대해서 알아보자. 과연 데이터 크기에 따라 통신속도가 얼마나 차이가 날까? 코드를 작성하여 통신속도를 직접 확인해보자.
2.1 코드 작성하기
🐍sender_speed.py
import rospy
from std_msgs.msg import String
rospy.init_node('sender_serial')
pub = rospy.Publisher('speed',String)
rate = rospy.Rate(1)
msg_size = 10**6 #1Mb
#msg_size = 5 * 10**6 #5Mb
#msg_size = 10**7 #10Mb
#msg_size = 2 * 10**7 #20Mb
#msg_size = 5 * 10**7 #50Mb
while not rospy.is_shutdown():
msg = "#" * msg_size + "," + str(rospy.get_time()) + "," +str(msg_size)
pub.publish(msg)
rate.sleep()
"#"의 개수에 따라 메세지의 크기가 달라진다. 보낼 때의 시간, 데이터 크기를 함께 담아 전달한다.
rospy의 get_time()을 통해 현재 시간을 초 단위로 확인 할 수 있었다.
🐍reciever_speed.py
import rospy
from std_msgs.msg import String
def callback(msg):
split_msg = msg.data.split(",")
sent_time = float(split_msg[1])
msgSize = int(split_msg[2])
current_time = rospy.get_time()
time_gap = current_time - sent_time
bytePerSec = msgSize / time_gap
print "time gap : " , time_gap , "msgSize : ", msgSize
print "Speed : ", bytePerSec , "Byte/s"
rospy.init_node('receiver_serial')
sub = rospy.Subscriber('speed',String,callback)
rospy.spin()
메세지를 받아 보낸시간과 받은 시간의 차이를 계산하고 메세지 전송 속도를 계산한다.
2.2 결과
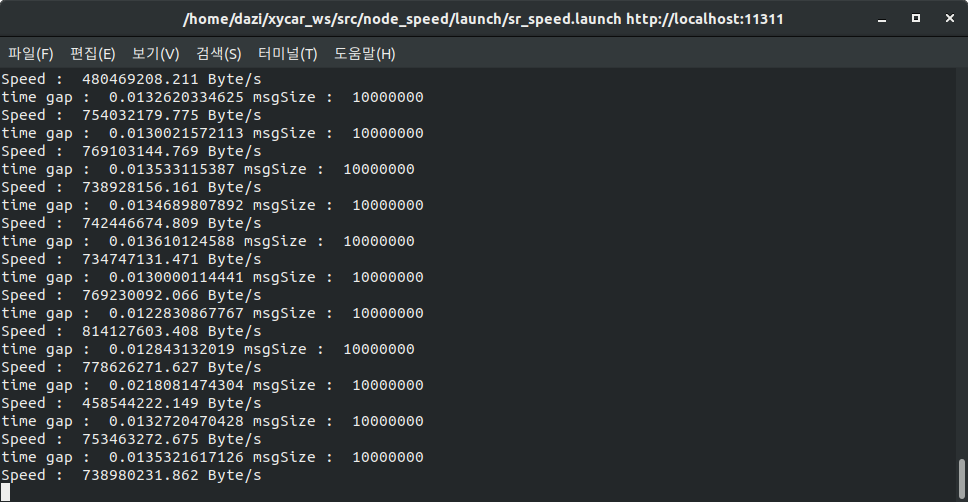
2.2.1 1Mb 메세지
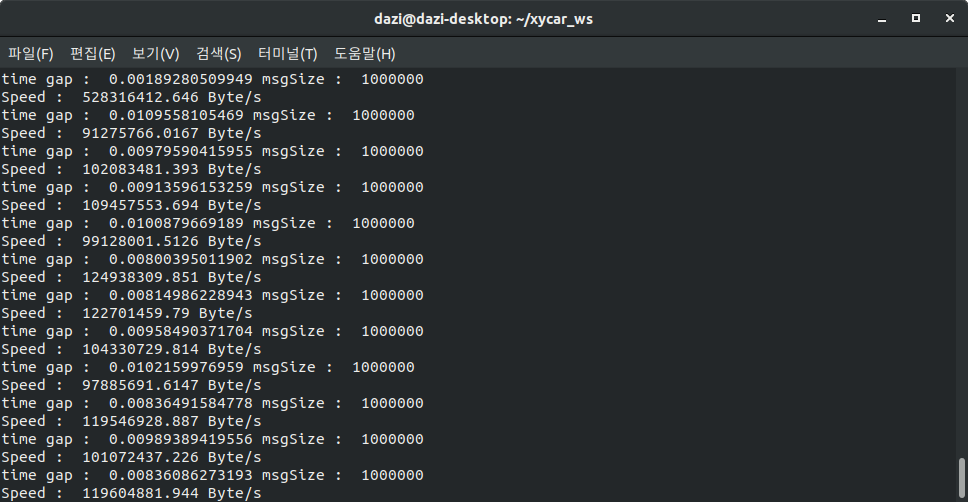
전송시간: 약 0.01초 이내
속도 : 약 120 MBps
2.2.2 5Mb 메세지
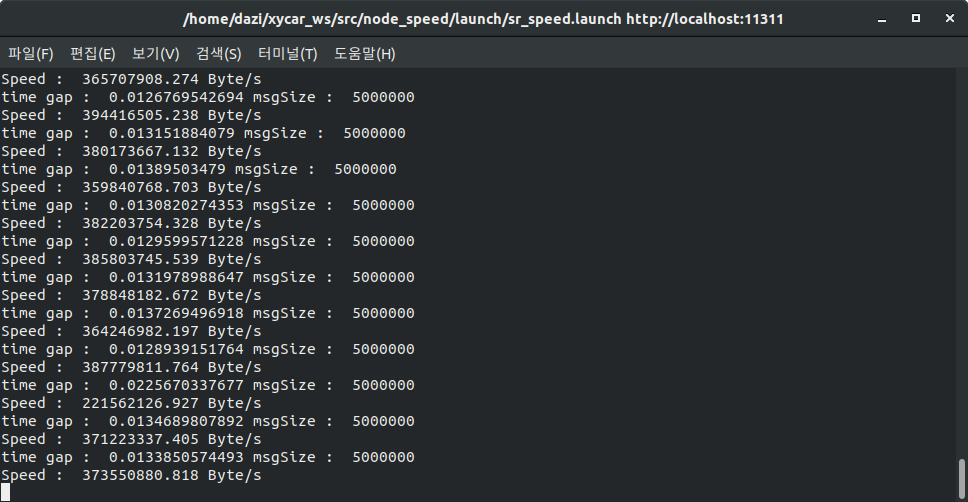
전송시간: 약 0.013초 이내
속도 : 약 360 MBps
2.2.3 10Mb 메세지
전송시간: 약 0.013초 이내
속도 : 약 750 MBps
2.2.4 20Mb 메세지
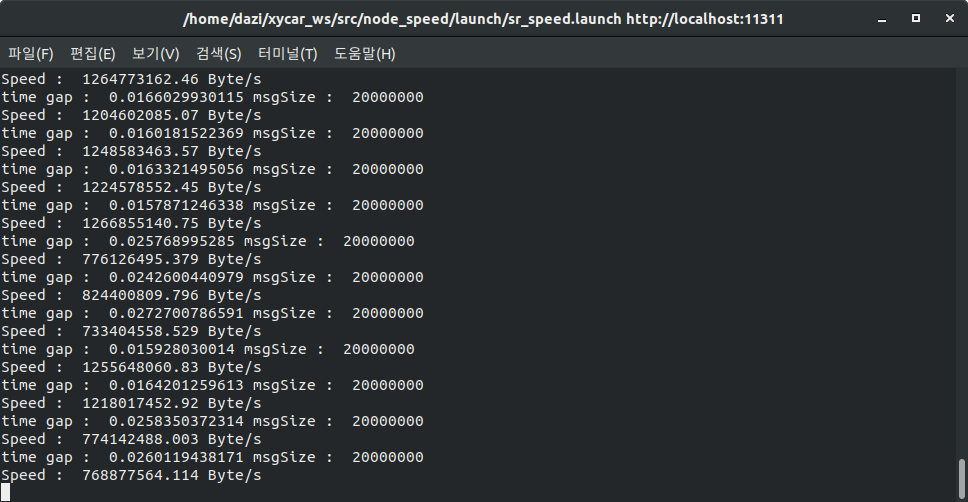
전송시간: 약 0.016초 ~ 0.026초
속도 : 약 768 ~ 1255 MBps
2.2.5 50Mb 메세지
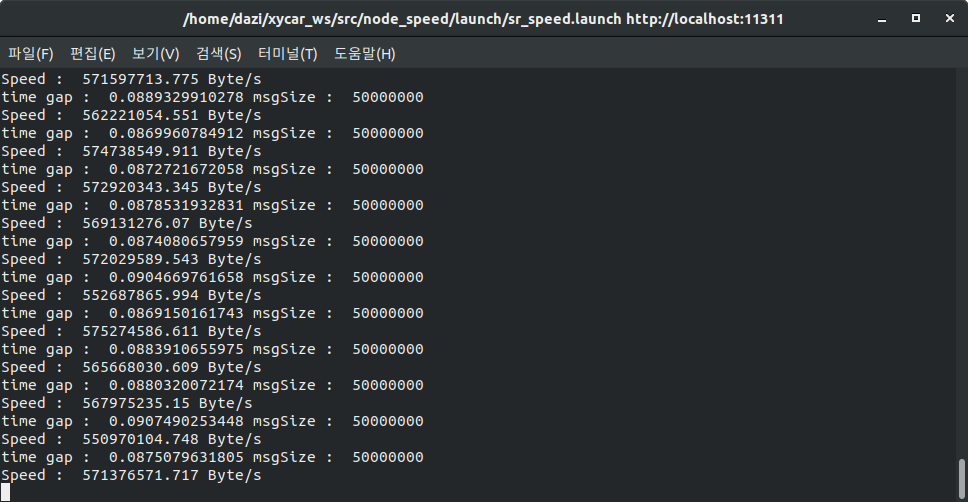
전송시간: 약 0.09초 이내
속도 : 약 580 MBps 이내
2.3 결과 해석
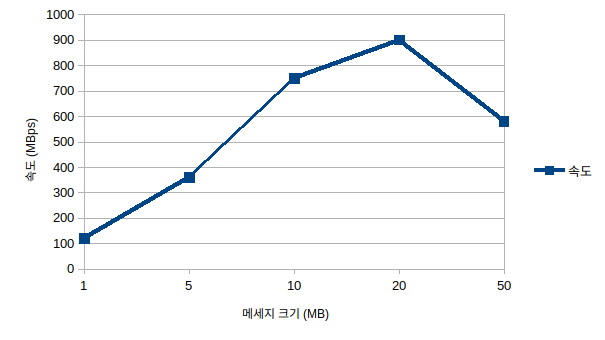
위와 같은 차트로 메세지 크기별 전송속도를 정리 할 수 있다. 20MB까지는 메세지의 크기에 비례해 속도가 증가하는 모습이 보였지만, 50MB 크기의 메세지에서는 속도가 오히려 줄어든 모습이 보였다.
🚥3.ROS 처리 지연 문제
노드끼리 통신을 할때 도착한 데이터를 미처 처리하지 못하면 어떻게 될까? 데이터를 쌓아 둘 것인가 버릴 것인가? 코드를 작성하여 알아보자.
3.1 코드 작성하기
🐍sender_overflow.py
import rospy
from std_msgs.msg import Int32
rospy.init_node('sender')
pub = rospy.Publisher('node_delay', Int32)
rate = rospy.Rate(1000)
cnt = 1
while not pub.get_num_connections():
pass
while not rospy.is_shutdown():
pub.publish(cnt)
cnt+=1
rate.sleep()
1초에 1000번 1씩 증가하는 값을 보내는 코드.
🐍reciever_overflow.py
import rospy
from std_msgs.msg import Int32
def callback(msg):
rospy.sleep(5)
print(msg.data)
rospy.init_node('receiver')
sub = rospy.Subscriber('node_delay', Int32, callback, queue_size =1)
rospy.spin()
rospy.sleep()를 통해 강제적으로 노드가 동작안하게 작성.
3.2 실행결과 & 문제점
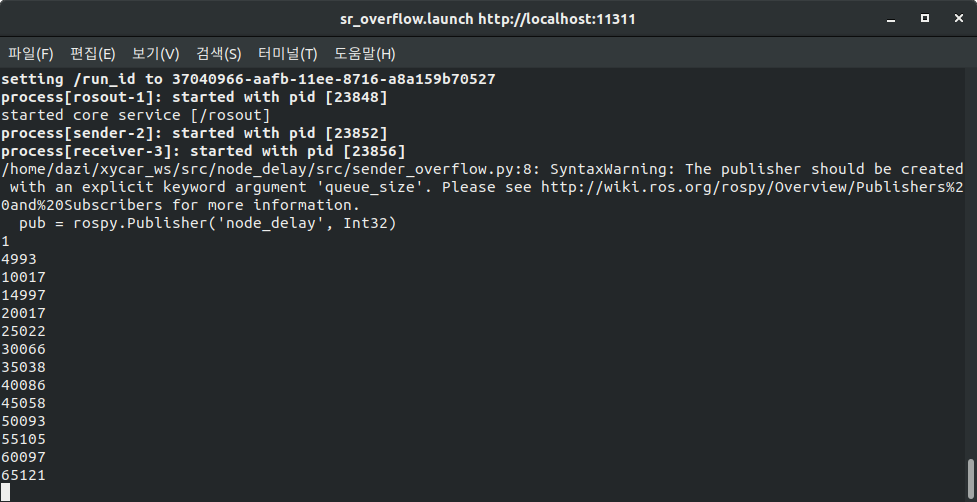
reciever 노드에서 sleep 함수로 5초간 강제로 쉬게하여 메세지의 간격이 약 5000단위로 나타나는 것을 확인 할 수 있었다. 노드가 다른 동작을 하는동안 받은 메세지는 버린다는 결론을 내릴 수 있다. 데이터를 버리지 않는 방법은 있을까?
3.3 문제해결
🐍reciever_overflow.py
import rospy
from std_msgs.msg import Int32
def callback(msg):
rospy.sleep(5)
print(msg.data)
rospy.init_node('receiver')
sub = rospy.Subscriber('node_delay', Int32, callback, queue_size =10000)
rospy.spin()
queue_size 의 사이즈를 늘려 누락되는 메세지를 없앨 수 있다. 다만 queue_size의 크기가 충분하지 않다면 누락은 발생 할 수 있다.
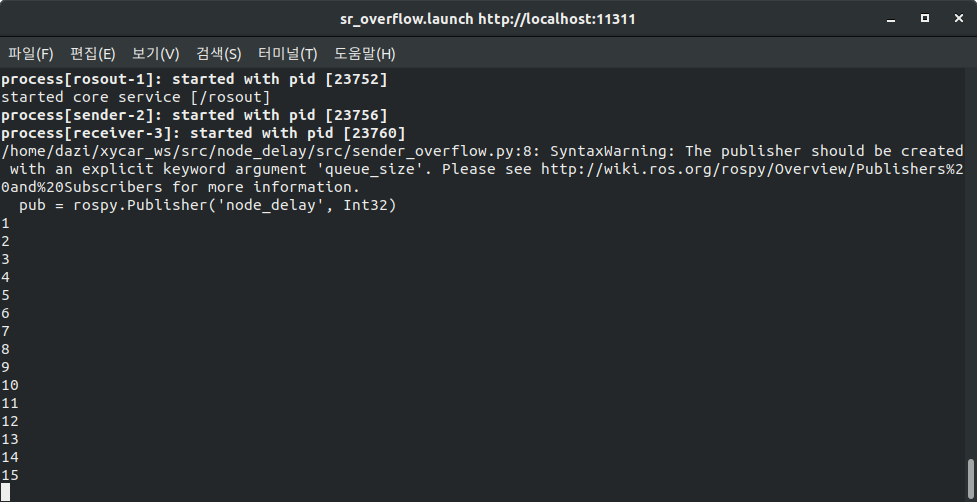
누락되는 메세지 없이 기록되는 모습을 확인 할 수 있다.
🚥4.ROS 타임 슬롯 문제
주기적 발송에서 타임슬롯을 오버하면 어떻게 될까? 어떤일을 처리하는데 시간을 너무 많이 쓰거나 일을 할 타이밍을 놓치면 어떤식으로 동작할까?
4.1개요
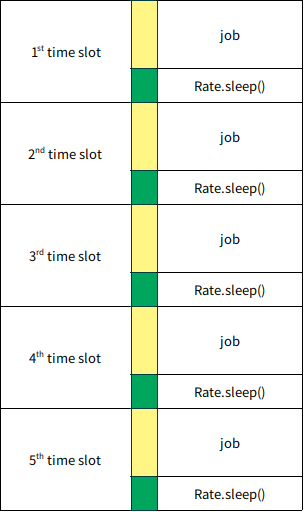
rospy.Rate(N)노드는 위와같이 Rate()를 통해 주파수를 정할 수 있고, 위의 함수는 1초동안 N번 일을 반복한다는 의미이다.
한번 동작하는 시간을 타임슬롯이라고 하고,아래의 표와 같이 보통 노드의 동작은 한번의 타임 슬롯 내에서 처리할 수 있도록 만들어 남는 기간동안 쉬는 시간을 가지게 된다. 하지만 일을 많이 시켜서 해당 시간내에 일을 완수하지 못하면 어떻게 될까? 코드를 통해 알아보자.
4.2 코드작성
🐍teacher_int32_job.py
import rospy
import time
from std_msgs.msg import Int32
def do_job(count):
for i in range(0,count):
i+=1
pub.publish(i)
def list_append_time():
start.append(start_time)
end.append(end_time)
sleep.append(sleep_time)
rospy.init_node('teacher')
pub = rospy.Publisher('msg_to_student', Int32, queue_size = 0)
rate = rospy.Rate(5)
while not rospy.is_shutdown():
start =[]
end = []
sleep = []
num = input("input count number > ")
rate.sleep()
total_start = time.time()
for j in range(0,5) :
start_time = time.time()
do_job(num)
end_time = time.time()
rate.sleep()
sleep_time = time.time()
list_append_time()
total_end = time.time()
for t in range(0,5):
sleep[t] = sleep[t] -end[t]
end[t] = end[t] -start[t]
for result in range(0,5):
print "spend time > ", round(end[result],4), 's'
print "sleep time > ", round(sleep[result],4), 's'
print "------------------------------------"
print "total time > ", round((total_end - total_start),4),'s'
print "------------------------------------\n\n"num값 을 받아서 num만큼 반복되는 일을 진행한다.
총 일을 5번 수행하고 5번의 일하는 시간과 sleep시간을 측정한다.
결과화면을 통해 일의양이 많아지면 어떤식으로 동작하는지 확인해보자.
4.3 결과화면
4.3.1 num == 100
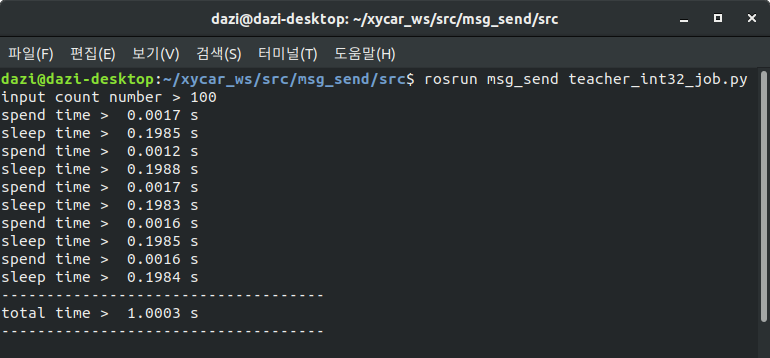
num이 100일때는 일을 금방 끝내고 sleep시간이 대부분인 것을 확인 할 수 있다.
4.3.1 num == 1000
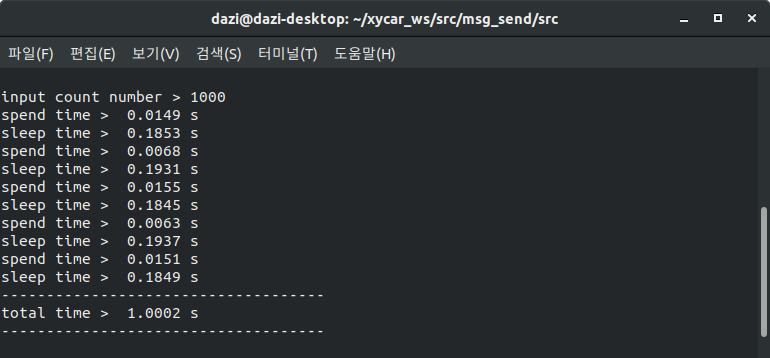
num이 1000일때도 num 100일 때 보다는 오래 걸리지만, sleep의 시간이 훨씬 많다. 수를 더 많이 늘려보자.
4.3.1 num == 100000
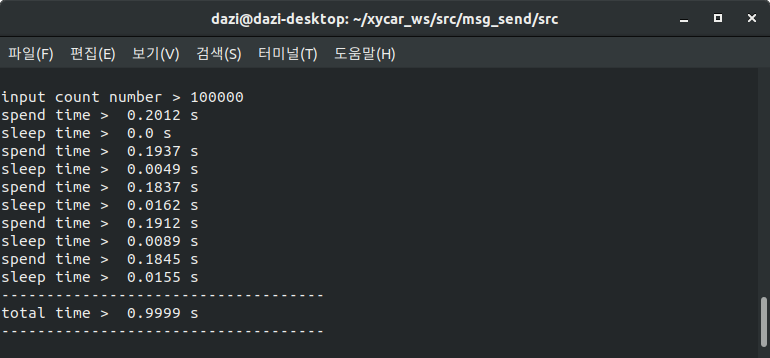
num 값이 100000 일때 첫번째 일에서 0.2s 을 넘겨 sleep시간 없이 다음 일을 진행하였고, 나머지 일들은 시간내로 끝낸 것을 확인 할 수 있다. 그럼 0.2s을 훨씬 넘는다면?
4.3.1 num == 150000
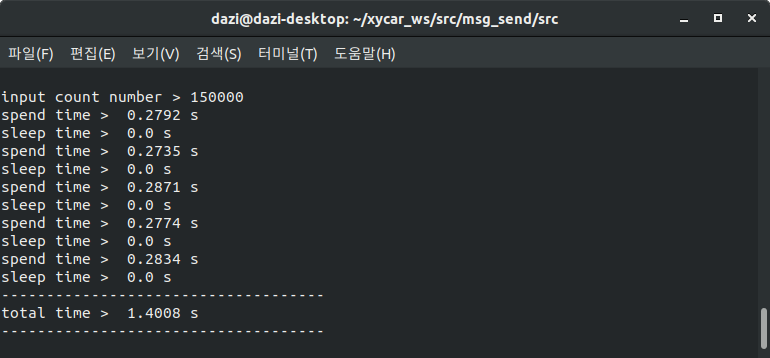
num이 150000일때는 타임슬롯 값보다 훨씬 오랜시간 일을 하고, sleep시간 없이 일을 진행하였으며, 1초가 넘는 시간동안 일을 하였다.
4.4결론
타임슬롯보다 많은 일을 시킨다면 타임슬롯을 초과하더라도 주어진 일을 수행하는 것을 확인 할 수 있었다.
🚥5.ROS 노드의 순차 실행
협업해야 하는 노드를 순서대로 기동시킬수 있는가? 만약 여러개의 노드가 주어지고 어떤 동작을 순차적으로 진행하려면 어떻게 해야할까? 순서를 지정해주지 않는다면 노드가 여러개면 랜덤 순서로 노드가 작동한다. 순서를 지정하는 법에 대해 알아보자.
5.1코드작성
🐍Reciever.py
import rospy
from std_msgs.msg import String
def callback(msg):
print msg.data
rospy.init_node('reciever')
sub = rospy.Subscriber('node_numbering', String, callback)
rospy.spin()
🐍First.py
import rospy
from std_msgs.msg import String
rospy.init_node('first')
pub = rospy.Publisher('node_numbering', String)
rate = rospy.Rate(5)
while not pub.get_num_connections() :
pass
while not rospy.is_shutdown():
pub.publish('My name is First')
rate.sleep()
🐍Second.py
🐍Third.py
🐍Fourth.py
Second~Fourth 의 구조는 first와 흡사하기 때문에 생략한다.
🚀node_numbering.launch
<launch>
<node pkg = "node_numbering" type="Receiver.py" name = "receiver" output ="screen"/>
<node pkg = "node_numbering" type="First.py" name = "first"/>
<node pkg = "node_numbering" type="Second.py" name = "second"/>
<node pkg = "node_numbering" type="Third.py" name = "third"/>
<node pkg = "node_numbering" type="Fourth.py" name = "fourth"/>
</launch>
단순한 Subscriber 와 4개의 Publisher를 선언한 뒤 launch를 사용하여 동시에 노드를 동작시켰다. 순서를 지정해주지 않았는데 어떤식으로 동작할까?
5.2 실행결과
5.2.1 첫번째 시도
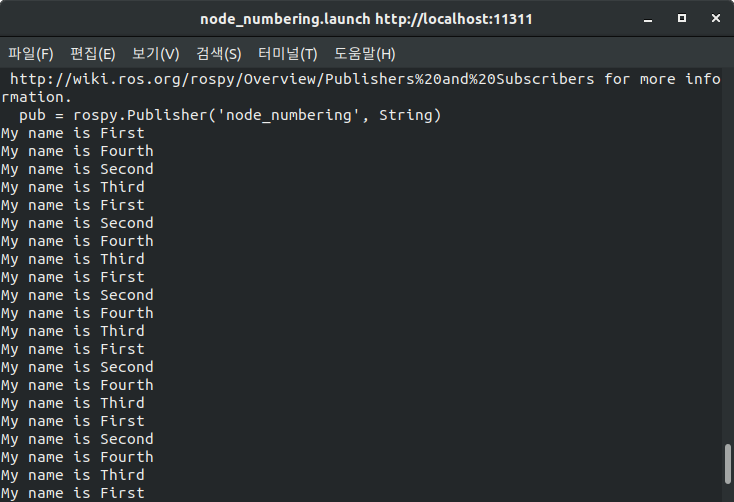
5.2.2 두번째 시도
두 가지 결과를 보면 임의의 순서대로 노드를 처리하는 것을 확인 할 수 있었다. 두번의 시도 외에도 전부 다른 순서의 결과가 나타났다.
순서를 지정해주기 위해 어떤 일을 해야할까?
5.3 문제해결
5.3.1 코드
🐍Reciever.py
import rospy
from std_msgs.msg import String
name = "receiver"
pub_topic = "start_ctl"
sub_topic = "msg_to_receiver"
def callback(data):
rospy.loginfo("I heard %s", data.data)
rospy.init_node(name)
rospy.Subscriber(sub_topic, String, callback)
pub = rospy.Publisher(pub_topic, String, queue_size =1)
rate = rospy.Rate(10)
hello_str = String()
rospy.sleep(1)
sq = ["first","second", "third","fourth"]
pub_msg = String()
for i in sq :
pub_msg.data = i + ":go"
pub.publish(pub_msg)
rospy.sleep(3)
rospy.spin()Subscriber 역할만 하던 노드에 Publisher 기능을 추가한다. "start_ctl"을 통해 first~fourth 까지 순서대로 토픽을 보내준다. sq에 담긴 순서대로 진행 할 수 있다. 순서대로 first~fourth : go 라는 메세지를 보내고 3초간 sleep한다. 다음 코드를 통해 메세지를 받은 뒤에 어떤식으로 동작하는지 알아보자.
🐍First.py
import rospy
from std_msgs.msg import String
name = "first"
pub_topic = "msg_to_receiver"
sub_topic = "start_ctl"
OK = None
def ctl_callback(data):
global OK
OK = str(data.data)
rospy.init_node(name)
rospy.Subscriber(sub_topic,String,ctl_callback)
while True :
if OK == None :
continue
d = OK.split(":")
if (len(d)==2) and (d[0] ==name) and (d[1] == "go"):
break
pub = rospy.Publisher(pub_topic, String,queue_size = 1)
rate = rospy.Rate(2)
hello_str = String()
while not rospy.is_shutdown():
hello_str.data = "my name is" + name
pub.publish(hello_str)
rate.sleep()
start_ctl 토픽으로 메세지를 받고 OK값에 대입한다. 이때 노드의 이름과 "go"가 포함되어 있으면 while 문에서 벗어나서 메세지를 보내기 시작한다.
🐍Second.py
🐍Third.py
🐍Fourth.py
Second~Fourth 의 구조는 first와 흡사하기 때문에 생략한다.
5.3.2 실행화면
각 노드들이 순서대로 메세지를 보내는 것을 확인 할 수 있다.
