ROS 플로그인 설치
VScode 플러그인 설치 창에 ros를 검색하고 설치
XML Tools 설치
VScode 환경 설정
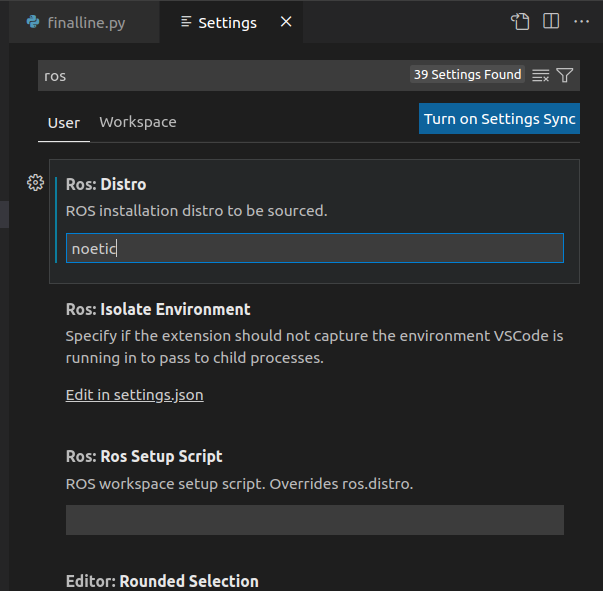
VScode에서 ctrl+,를 눌러 setting 할 수 있는 항목들의 검색창을 띄움
ROS를 검색하여 자신에게 맞는 distro 적어줌
(나는 Ubuntu 20.04이므로 noetic)
mavros 관련 패키지 설치
(mavros : ROS(1)과 MAVLink 프로토콜 간의 공식 지원 브리지.
모든 MAVLink 지원 자동 조종 장치와 통신할 수 있음)
sudo apt-get install ros-noetic-mav*catkin 작업공간 만들기
$ mkdir -p ~/catkin_ws/src
$ cd ~/catkin_ws/src
$ catkin_init_workspace
[출처] catkin_make 후 에러 source devel/setup.bash|작성자 봄봄바라기위의 명령들을 실행하고 난 뒤에도 작업공간이 비어있지만(src폴더 안에는 어떤 패키지도 없고 CMakeLists.txt만 존재한다.) 이 작업공간을 "빌드"하는 것이 가능
$ cd ~/catkin_ws/
$ catkin_make이후 ~/.bashrc 에
source devel/setup.bash를 추가해줌
(gedit ~/.bashrc
로 들어가 추가해줌)
활용하기
내가 원하는 파일에서 catkin_make 실행
- VScode 들어가서 Ctrl + Shift + P를 누른 후 ros를 입력
ROS:Create Catkin Package로 패키지 생성
1-2. 패키지 이름 설정 -> 필요한 dependency 입력 (ex. rospy, std_msgs)
- src 폴더 아래에 새 폴더 생성
끝!
..이 아니라 내가 원하는 파일에서 catkin하려 하니까 하면서 생긴 오류들 (위에는 ~/catkin_ws/src 경로에서 진행하는 절차)
Invoking "make cmake_check_build_system" failedhome에 catkin_ws 파일이 있지만, ~/dabeen/Dev/ros/ 에 catkin_ws를 넣고 프로그램을 돌리고 싶음
-> CMake어쩌고.txt에 있는 경로가 다른 경로가 해당 폴더의 경로가 아니어서 그런 듯
-> gedit ~/.bashrc를 통해 경로들을 모두 기본 경로(ex. ~/catkin_make)로 바꾼 후 home에 있는 catkin 파일 삭제
The specified base path "/home/catkin_ws" does not exist 오류 발생아직 미해결. . . 일단은 ~/catkin_ws/src에서 진행하기로 함

Web-Front / SW-AI 개발자