Multivariate Causal Models
이전까지는 변수가 2개인 SCM, 즉 원인-결과의 SCM을 살펴보았었다. 이제부터는 변수가 여러개인(multivariate) causal model들에 대해 살펴보도록 하자. 우선, cause-effect 모델도 포함되지만 다변량 causal model은 일반적으로 그래프(graph)의 형태로 표현된다.
Graph의 정의
그래프란, 확률변수 의 index set 와 의 부분집합 로 이루어진 순서쌍 을 의미한다. 이때 의 각 원소를 그래프의 노드(node)라고 하며, 의 각 원소 를 변(edge)이라고 한다. 또한, 변 가 존재한다는 것은 i번째 노드에서 j번째 노드로 가는 화살표(방향을 포함하는 의미)가 존재한다는 것을 의미한다.
만일 노드 i,j에 대해 가 성립하지만 인 경우, 즉 i에서 j의 방향으로만 연결이 존재하는 경우 노드 i를 j의 부모 노드(parent node)라고 하고 j를 i의 자식 노드(child node)라고 한다. 또한, 만일 이고 가 동시에 성립하면 노드 i,j를 인접(adjacent)하다고 한다.
또한 그래프 에 대해 경로(path)를 정의할 수 있는데, 그래프의 노드 가 각 에 대해 를 잇는 변이 존재한다면 노드 1부터 m까지의 경로가 존재한다고 한다. 또한, 만일 경로상의 모든 변의 방향이 일치한다면 이를 directed path라고 한다. 이때 directed path 경로의 시작 노드를 ancestor, 종점 노드를 descendant라고 정의한다.
만일 그래프 에 대해 j에서 k로의 directed path와 k에서 j로의 directed path가 동시에 존재하는 노드 쌍 가 없다면 를 PDAG(Partially directed acylic graph) 라고 하며, PDAG이며 동시에 그래프의 모든 변이 방향을 가진다면 DAG(Directed acylic graph) 라고 정의한다.
Pearl’s d-separation
DAG 에 대해 다음 두 경우 중 하나를 만족하는 노드 가 존재한다면 에서 사이의 경로가 집합 에 의해 가로막혀있다고(blocked) 정의한다.
1. 이고
중 하나를 만족한다.
2. 노드 나 의 어떤 descendant도 집합 에 포함되지 않으며
을 만족한다.
또한, DAG 의 서로소인 세 노드 집합 에 대해, 의 원소와 의 원소를 잇는 모든 경로가 의 원소에 의해 가로막혀있다면 이를
로 표기한다.
Multivariate SCM
이전까지는 cause-effect 모델에 관해 SCM을 살펴보았는데, 이를 일반화하여 다변량 모델에 대한 SCM을 정의하고 이를 살펴보도록 하자. 우선 다변량 SCM은 다음과 같이 정의한다.
Definition
노드가 개로 주어지는 SCM 은 다음 개의 structural assignments로 구성된 collection 와
각 i.i.d인 Noise variable 들의 joint distribution 으로 구성된다. 여기서 는 노드 의 부모 노드들의 집합이며, 자기 자신은 제외한다.
위와 같이 정의된 SCM은 확률변수 에 대한 유일한 확률분포를 결정하는데, 이를 entailed distribution이라고 하며 혹은 라고 표기한다. 이는 i.i.d noise variable으로부터 생성된 표본으로 i.i.d random sample 를 구성할 수 있다는 의미이다.
Example
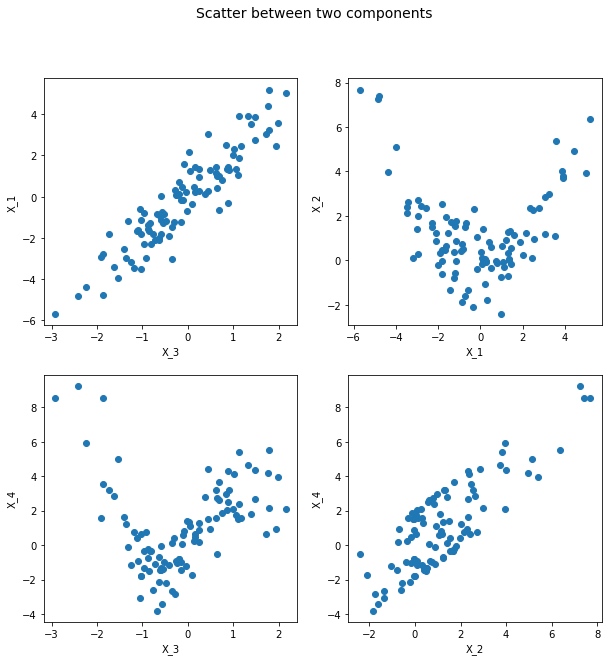
다음과 같은 SCM
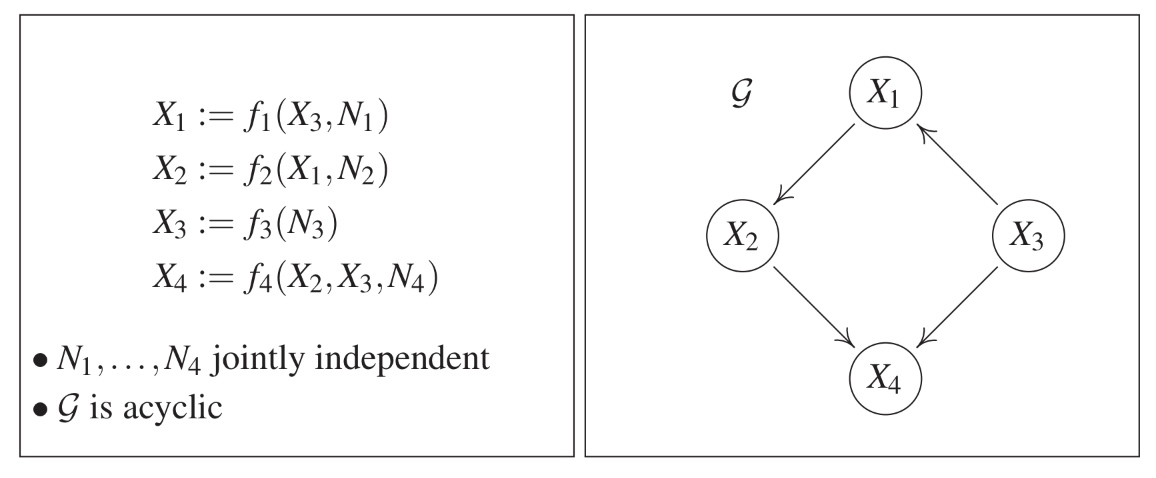
에 대해
으로 주어지며, 각 noise variable이 모두 i.i.d인 정규분포를 따른다고 가정하자. 그러면 다음과 같이 의 random sample을 생성할 수 있다(Code on Github).
Intervention
이전에 다루었던 Cause-Effect 모델에서의 intervention과 마찬가지로, multivariate SCM에 대해서도 intervention distribution을 생각해볼 수 있다. SCM 이 주어졌을 때, 새로운 assignment
에 대응하는 intervention이 일어났다고 하자. 그러면 이에 대한 intervention distribution을 다음과 같이 표기한다.
단, intervention으로 새롭게 대치되는 noise variable 과 기존 noise variable 은 모두 서로 독립이어야 한다.
Total cause effect
확률변수 와 에 대한 어떤 random variable 에 대해
이면, 즉 가 noise variable로 intervened 된 상황에서 가 독립이라면 에서 로의 total causal effect가 존재한다고 정의한다. 이 정의의 조건은 쉽게 이해할 수 있지만, total causal effect의 실제 의미를 파악하는데는 어려움이 있을 수 있다. 이에 대해, 동치인 다른 명제들이 다음과 같이 존재한다.
동치관계
확률변수 를 포함하는 SCM 에서 에서 로의 total causal effect가 존재한다는 것과 다음 각각은 동치이다.
1. 인 가 존재한다.
2. 인 가 존재한다.
1번과 2번이 total causal effect의 정의와 동치인 것은 쉽게 연상할 수 있다. 에 대해 noise variable로 intervention이 이루어진 경우 가 독립이라면 1번과 2번 식 모두 등호(=)가 성립할 것이지만, 그렇지 않으므로 그 역이 된다는 것을 알 수 있다.
Total causal effect가 존재한다는 것은, SCM에 대응하는 그래프에서 의 directed path가 존재한다는 것과 관련된다. 그러나 역으로 directed path가 존재한다고 해서 total causal effect가 존재하지는 않는다.
Counterfactuals
이전에 bivariate causal model에 대한 Counterfactual을 다룬 적이 있었다. 간단히 말해서, causal model의 특정 노드 혹은 noise variable이 변화될 때 causal model을 가정하는 것이다. 마찬가지로, multivariate causal model 에 대해서도 다음과 같이 Counterfactual을 정의할 수 있다.
여기서 는 노드 벡터 의 관측값을 의미하며, noise distribution에 대해 가 성립한다. 또한, counterfactual에 의한 새로운 noise variable들은 서로 독립일 필요가 없다.
Example
에 대한 다음 SCM
를 생각하자. 또한, noise distribution은 , 즉 uniform (discrete) distribution으로 주어진다고 하자. 만일 관측값 가 주어진다면 에 대한 새로운 noise distribution은 , 즉 point mass 1을 갖는다. 따라서, 주어진 관측 아래 다음과 같은 명제
“ would have been if had X been set to ”
가 성립한다. 즉,
이 성립한다.
References
- Elements of Causal Inferences
