Pinhole camera
- 카메라로 이미지를 얻는 과정은 복잡함
- pinhole camera model은 core concept in a simplified manner로 설명하는 것을 도와줌

Sampling
이미지를 M x N grid of pixels로 만듦
Quantizing
픽셀의 값을 L(e.g. 256) discrete levels로 정함
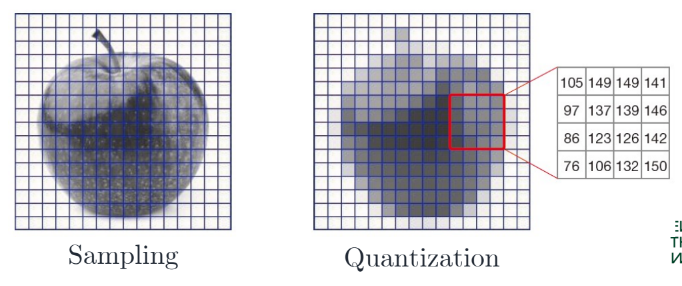
We can think of an image as a function
f:R2→R
f(x,y) gives the intensity ∈[0,L−1] at position (x,y)
color image는 three functions pasted together된 것임
f(x,y)=⎣⎢⎡r(x,y)g(x,y)b(x,y)⎦⎥⎤
RGB color model
보통 각각 픽셀 값을 0~255의 값으로 표현함
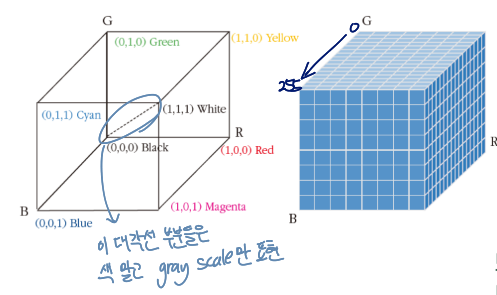
아는 내용이니까 이 정도만 짚고 넘어가도록 함
HSV color model
색의 타입, 밝기, 채도를 통해 색을 표현하는 방법
- H : Hue 색의 타입
- S : Saturation 채도
- V : brightness of light 밝기
More robust to changes in lighting compared to the RGB model
RGB vs. HSV
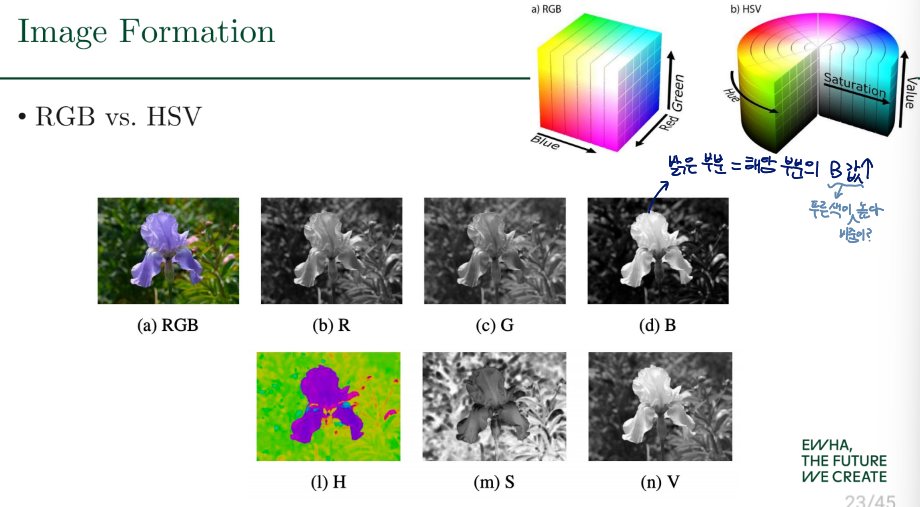
Image Processing
Existing image f로부터 새로운 이미지인 g를 만들고자 함
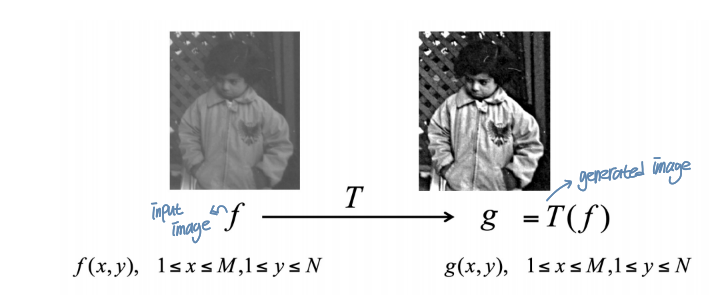
이런 것을 수행하기 위한 operation에는 어떤 것들이 있는지 알아볼 것임
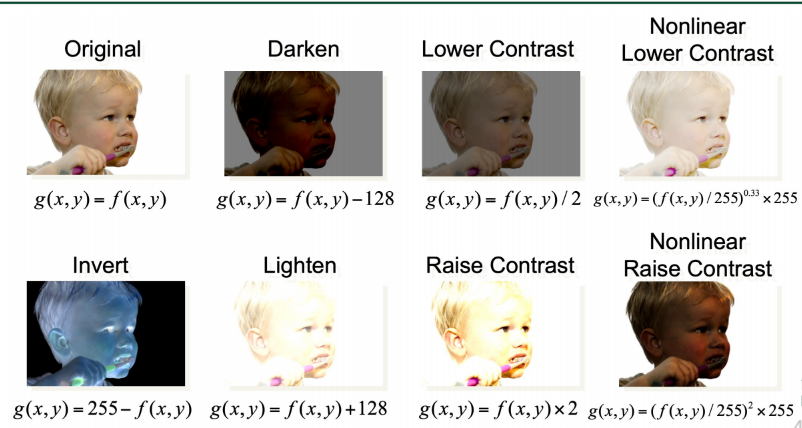
Point Operations
output pixel의 value는 오직 corresponding input pixel의 value에만 depends
위치를 나타내는 변수 x=(i,j)라고 한다면
g(x)=T(f(x))org(x)=T(f0(x),f1(x),...,fn(x))
뒤의 수식의 예 : RGB value인 경우 g(x)=T(fR(x),fG(x),fB(x))
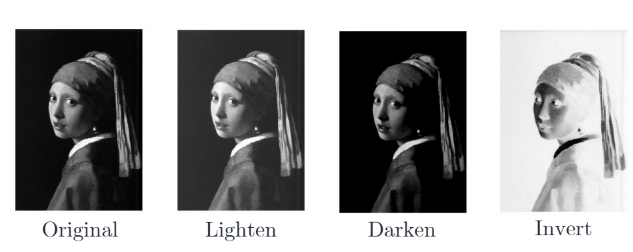
Linear operations
g(j,i)=⎩⎪⎪⎨⎪⎪⎧min(f(j,i)+α,L−1)max(f(j,i)−α,0)(L−1)−f(j,i)LightenDarkenInvert
이때, α는 양수
Gamma correction
g(j,i)={(L−1)×(f^(j,i))γwheref^(j,i)=(L−1)f(j,i)
- γ=1 → identity function (=original image)
- γ>1→f^(j,i)γ≤1 → darken image
- γ<1→f^(j,i)γ≥1 → lighter image
γ를 역수 취하면 반대 결과를 얻게 됨
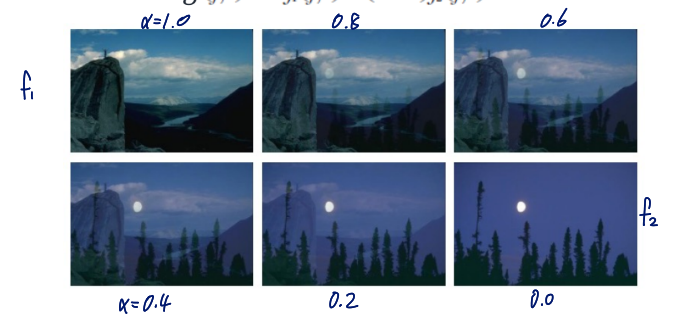
Scene dissolve
e.g. k=2
g(j,i)=αf1(j,i)+(1−α)f2(j,i)
Histogram
shows how often each (grayscale) value in the range [0, L-1] appears in the image
h(l)=∣{(j,i)∣f(j,i)=l}∣ absolute count
h^(l)=M×Nh(l) normalized histogram
히스토그램을 통해 이미지의 특징을 파악할 수 있음
such as constrast, brightness, and intensity distribution

Histogram equalization
한국어로 평활화
- An operation that flattens the histogram
- Enhances image quality by expanding the dynamic range of intensities
- Uses the cumulative histogram, c(⋅), as the mapping function
lout=T(lin)=round(c(lin)×(L−1))
where c(lin=∑l=0linh^(l))
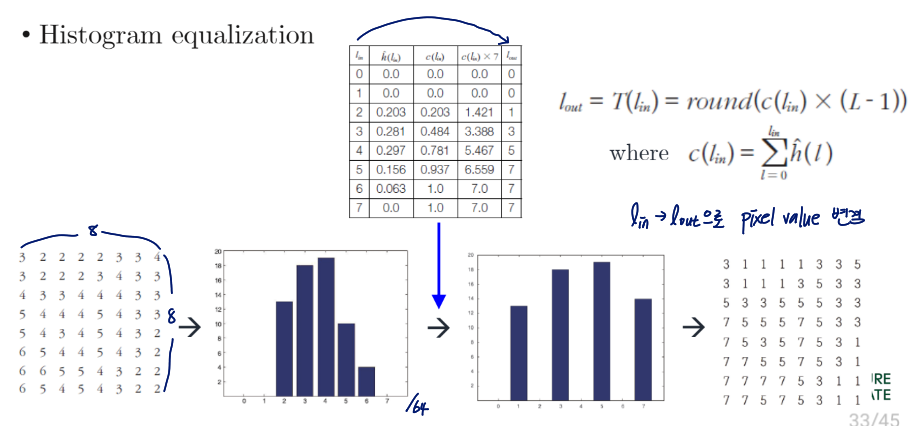

histogram equalization을 통해 이미지가 더 선명해짐

벌레가 더 잘 보이게 되었지만 texture가 별로임
→ histogram equalization을 사용하는 것이 언제나 좋은 것은 아님
Binarization (Thresholding)
b(j,i)={1,0,f(j,i)≥Tf(j,i))<T
- Threshold를 어떻게 automatically 찾을 수 있을까?
보통 valley 부분을 Threshold로 설정함
- What if there are more than one valley?
Otsu's algorithm
Otsu's algorithm
- Based on the principle that binarization is better when both the black and white groups are as homogeneous as possible
black과 white pixel의 비율이 비슷해야 한다는 뜻인듯?
- Homogeneity is measured by variance: lower variance within each group indicates higher homogeneity
variance를 통해 homogeneity가 측정되는데, 각각 그룹의 variance가 낮을수록 homogeneity는 높음
T=t∈{0,1,...,L−1}argminvwithin(t)
vwithin(t)=w0(t)v0(t)+w1(t)v1(t)
w0(t)=i=0∑th^(i) w1(t)=i=t+1∑L−1h^(i)
μ0(t)=w0(t)1i=0∑tih^(i) μ1(t)=w1(t)1i=t+1∑L−1ih^(i)
v0(t)=w0(t)1i=0∑th^(i)(i−μ0(t))2 v1(t)=w1(t)1i=t+1∑L−1h^(i)(i−μ1(t))2
그러나 시간복잡도가 O(L2)으로 매우 느리다는 단점을 갖고 있음
argmin을 구하는 횟수 L번, 각 vwithin(t)를 구할 때 계산량 O(L) → O(L2)
efficient veresion
v=i=0∑L−1(i−μ)2h^(i)=vwithin+vbetween
where vwithin(t)=w0(t)v0(t)+w1(t)v1(t)
vbetween(t)=w0(t)(1−w0(t))(μ0(t)−μ(t))2
각 그룹 평균의 차로 define
∴T=t∈{0,1,...,L−1}argminvwithin(t)↔ T=t∈{0,1,...,L−1}argmaxvbetween(t)
w0(t)=w0(t−1)+h^(t)
μ0(t)=w0(t)w0(t−1)μ0(t−1+th^(t))
μ1(t)=1−w0(t)μ−w0(t)μ0(t)
→ 이전에 구해놓은 값들을 사용하면 바로 구할 수 있음
→ recycle previous value를 통해 일일이 계산 안해도 되게 됨!
여러 point operations 결과